
国際特許分類[B65H63/00]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 薄板状または線条材料,例.シート,ウェブ,ケーブル,の取扱い (43,151) | フィラメント材料の巻き戻し、繰り出し、巻きあげ、巻きつけ、コイル形成、または堆積する際に使用する警報または安全装置,例.自動不良検出器,作動停止装置 (183)
国際特許分類[B65H63/00]の下位に属する分類
材料の,張力低下,供給停止,または破損に応答するもの (66)
過張力または装置の作動の異常に応答するもの (12)
材料の移行中の異常の存在に応答するもの,例.異常時に材料を切離すためのもの (50)
測長された長尺物の送り出し,パッケージの巻取完了または容器の充満に応答するもの (13)
国際特許分類[B65H63/00]に分類される特許
21 - 30 / 42
自動ワインダ
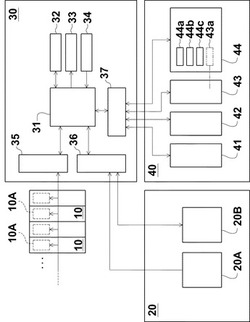
【課題】機台制御装置がパッケージコンベアにより順々に搬送される巻取パッケージのパッケージ情報を容易に把握可能な自動ワインダを提供する。
【解決手段】複数で設けられ、給糸ボビンから解舒された紡績糸を巻取ボビンに巻き取って巻取パッケージPを形成する巻取ユニット10・10・・・と、前記複数の巻取ユニット10・10・・・から玉揚された巻取パッケージPを搬出するパッケージコンベア20と、を備える。この自動ワインダ100全体を管理する機台制御装置30を備え、前記パッケージコンベア20の搬出方向一端側には、このパッケージコンベア20により順々に搬送される各巻取パッケージPのパッケージ情報を前記機台制御装置30へ送信する巻取パッケージ情報送信装置40を備える。
(もっと読む)
ボンディングワイヤの巻取り装置および巻取り方法

【課題】ワイヤの巻取りにおいて、従来のプーリー等による機械的張力付与機構および張力付与機構により生じていた急峻なワイヤ張力の変動や過度なワイヤ張力によるワイヤ走行経路の逸脱、ワイヤの変形、表面損傷、破断を無くし、安定的にスプールへの巻取りを可能とする。
【解決手段】ワイヤを静電吸着力によって巻取りスプールに吸着した状態で、ワイヤに空気抵抗力や重力を働かせることによって非接触でワイヤに張力を付与しながら、スプールに巻き取る。巻取り後に、除電機構によってワイヤに帯電した電荷を除去する。
(もっと読む)
ワイヤレス接続されたセンサおよびアクチュエータを備える紡績機
本発明は、少なくとも1つのセンサと、少なくとも1つのアクチュエータを備える紡績機であって、前記センサは前記紡績機の動作状態を感知し、該動作状態を特徴づける信号を送出し、該信号は前記アクチュエータに供給され、該アクチュエータは前記信号に応じて措置を開始する、紡績機に関し、このとき少なくとも前記センサ(1)は、前記アクチュエータ(3)と無線接続(2)を介して接続されている。したがって、前記センサと前記アクチュエータの間の導電接続は必要ない。  (もっと読む)
(もっと読む)
糸巻取装置
【課題】糸巻取装置においてパッケージ7の品質低下を防止する。
【解決手段】巻取ボビン6,7を支持可能とするクレードル8と、巻取ボビン6,7に連結されるパッケージ駆動モータ41と、巻取ボビン6,7の周面に接触して従動回転可能な接触ローラ9と、を備える。クレードル駆動機構24は、巻取ボビン6,7の周面を接触ローラ9に接触させるリフトダウン位置と、接触ローラ9から離間させるリフトアップ位置と、にクレードル8を移動可能である。リフトアップ時において、接触ローラ9はブレーキ機構27により制動される。ブレーキ機構27に異常が生じて接触ローラ9の停止が不完全な場合、アラーム出力手段52は、リフトダウン時にパッケージ回転センサ43が接触ローラ9の慣性回転を間接的に検知し、アラーム信号を出力して警告ランプ61を点灯させる。
(もっと読む)
異物検出装置および繊維機械および異物検出方法
【課題】糸条に混入している異物の検出において、残存させたい異物がある場合に、残存させたい異物を検出しないようにすると、除去したい異物の検出精度を落とすことになる。
【解決手段】綿繊維で形成される紡績糸9にLED37a・37bから交互に光(直射光Da・Db)を照射して、その紡績糸9からの反射光Rb・Raの強度を測定し、その強度情報に基づいて、紡績糸9に混入している異物の有無を検出する異物検出装置32であって、LED37a・37bの光源色を、除去せず残存させたい異物である綿繊維の茎葉のトラッシュの色と、色相環において、同一の系統色もしくは類似の系統色である黄色もしくは黄燈色とする。
(もっと読む)
繊維機械
【課題】 従来の繊維機械は、巻取管の有無を調べることができるが、巻取管がクレードルの受け皿に対応しているか否かを判別することはできない。そのため、従来の繊維機械は、間違った巻取管が存在した場合、その巻取管を巻取ユニットに装着しようとすることに起因する玉揚動作の失敗を回避することができない。そこで本発明においては、ストッカーに貯留されている巻取管が巻取ユニットに対応しているか否かの正誤を判別することができる繊維機械を提供することを課題としている。
【解決手段】 糸を巻取るための巻取管を貯留しておくストッカーを備える巻取ユニットが複数並設されている繊維機械において、ストッカーに貯留されている巻取管が前記ストッカーを備える巻取ユニットに対応しているか否かの正誤を判別する、巻取管判別手段を設けたことを特徴とする繊維機械。
(もっと読む)
糸巻取装置及び糸巻取方法
【課題】糸を巻き取るための巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、糸を綾振るためのトラバース装置5と、を備え、このトラバース装置が、トラバースガイド11と、トラバースガイド駆動モータ45と、を有する糸巻取ユニット2を用いて、巻取開始から巻取終了まで単一のワインド数WNを保ちながら巻き取り、かつトラバースガイド駆動モータ45の故障、発熱、脱調等を防止できる糸巻取方法を提供する。
【解決手段】巻取ボビン径Dが所定の限界径Dendになるまでは、限界回転速度基準制御手段83により、前記トラバースガイド駆動モータ45の回転速度Tが限界回転速度Tmax以下になるように前記パッケージ駆動モータ41の回転速度Tを調整する。巻取ボビン径Dが限界径Dendに到達した後は、糸巻取速度基準制御手段85により、糸巻取速度WSが要求糸巻取速度WSdとなるように前記パッケージ駆動モータ41の回転速度Bを調整する。
(もっと読む)
糸巻取機の糸監視装置
【課題】巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、このモータ41とは切り離されて駆動し、前記糸巻取の際に糸を綾振るためのトラバース装置5とを備えた糸巻取機において、糸欠点を正確に検出できる糸監視装置を提供する。
【解決手段】糸監視装置63は、糸監視器15の監視結果と糸速度検出手段61の速度検出結果に基づいて糸欠点を検出する。糸速度検出手段61は、巻取チューブ6に糸4が巻き取られて形成された糸層の周面の周方向の糸層周面移動距離ΔPLsの検出手段73と、糸層の幅方向の糸のトラバース移動距離ΔTLsの検出手段74と、糸層周面移動距離演算手段73で検出されたΔPLsとトラバース移動距離演算手段74で検出されたΔTLsをそれぞれ入力し、これらから単位時間当たりの糸層周面移動距離及びトラバース移動距離を各々計算し、その結果に基づいて糸の走行速度を求める糸速度演算手段77と、を備える。
(もっと読む)
繊維機械用巻取り装置
【課題】ドラムシャフトを回転駆動するモータ及びトラバース装置を駆動するモータへの電力供給停止時に、機械的にドラムシャフトとトラバース装置とを同期させて停止させることができる繊維機械用巻取り装置を提供すること。
【解決手段】繊維機械用巻取り装置1は、巻取りパッケージ11aを回転させる巻取りドラム11bと、巻取りドラム11bが固定されているドラムシャフト11と、ドラムシャフト11を回転駆動する第1モータ2と、巻取りパッケージ11aに巻取られる糸を綾振りするトラバース装置12と、トラバース装置12を駆動する第2モータ3と、停電時にトラバース装置12の動作が停止するまでに作動し、停電時でのトラバース装置12の動力源となるドラムシャフト11の駆動力を、ドラムシャフト11の回転が停止するまでトラバース装置12に伝達する動力伝達手段13と、を備える。
(もっと読む)
線条体の自動整列巻き方法及びその装置
【課題】ドラムの鍔が変形していても、ケーブルの崩れを生じないように、また、より多くのケーブルを巻き付ける。
【解決手段】線条体の自動整列巻き方法は、両側に鍔3Bを備えた回転するドラム3に線条体5を相対的にトラバースさせながら自動整列して多層巻きする際に、n層に線条体5を巻付けているときに、予め、次の(n+1)層に巻付けられる線条体5の中心を通る直線上のつば内幅を非接触式のつば幅検出装置21により測定し、この測定されたつば内幅と線条体5の外径に基づいて、(n+1)層に巻付けられる線条体5の巻数と各線条体5の配置ピッチPを計算し、この計算された配置ピッチPに基づいて、状況に応じて前記n層目に巻付けられた線条体5と前記鍔3との間の上、並びに前記n層目の線条体5の間の上に前記線条体5を巻付ける。
(もっと読む)
21 - 30 / 42
[ Back to top ]