
国際特許分類[B66C23/88]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | ビーム,ブームまたは片持梁として作動する三角形状構造物を必須構成とし,これらが水平面,垂直面内の直進,揺動またはこれらの組合された運動をするよう取付けられているクレーン,例.ジブクレーン,デリツククレーンまたは塔クレーン (1,450) | 安全装置 (291)
国際特許分類[B66C23/88]の下位に属する分類
もち上げ動作を表示,もしくは制限するための装置 (115)
ジブの後方への揺動,例.ケーブルまたはタツクルが切れた場合の揺動,を防止するための緩衝機またはダッシュポット (13)
旋回運動を制限するためのもの (29)
国際特許分類[B66C23/88]に分類される特許
101 - 110 / 134
自走式作業機械の制御装置及びこれを備えた自走式作業機械
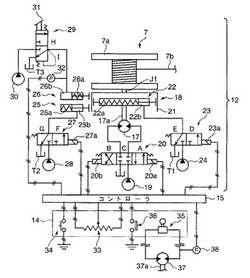
【課題】ウィンチドラムの状態が中立フリーモードに設定された状態で走行する場合であっても安全性を充分に確保すること。
【解決手段】所定の選択指令を受けることにより、ウィンチモータ17が停止しているときの前記ウィンチドラム7aの状態を、前記ウィンチドラム7aの回転が拘束される中立ブレーキモードと、ウィンチドラム7aの自由回転が許容される中立フリーモードとの間で切換えるモード切換手段39と、自走式クレーン1の運転状態が予め設定された走行認定条件を満たすときに前記選択指令にかかわらずウィンチドラム7aの状態を中立ブレーキモードに強制的に切換える強制モード切換手段40とを備えている。
(もっと読む)
クレーン接近警報システム

【課題】クレーンの先端部の位置を正確に求めることのでき、ジブ同士が接近したときには確実に報知することのできるクレーン接近警報システムを提供する。
【解決手段】クレーン1,10のジブ2,12同士が互いに接近したとき報知するクレーン接近警報システムであって、各ジブの先端部に装着したGPSアンテナ3,13と、各GPSアンテナの受信データに基づいて各ジブの先端部の位置を求める演算手段4,6、14,16と、GPS補正情報を配信する配信サーバ22と、 演算手段との間や演算手段と配信サーバとの間でネットワーク23を介して情報の送受信を行う無線カード6,16と、各演算手段は、GPSアンテナの受信データと配信サーバから配信されるGPS補正情報とに基づいて各ジブの先端部の位置を求め、この求めた位置情報を互いにネットワークを介して送受信して、ジブ同士が接近したか否かを判断して、接近したとき報知する。
(もっと読む)
クレーンの吊上げ装置
【課題】ウインチからのワイヤロープ24をクレーンのブーム先端部シーブ群23aとフックブロックシーブ群7とに掛回してフックブロック10をブーム先端部に昇降させる際に、掛回されたワイヤロープの速度差によりフックブロックが傾斜するのを防止する。
【解決手段】フックブロックは、中心に配置したフックの左右にそれぞれ右側シーブ群6aと左側シーブ群6bとに分けて配置し、クレーンブームの先端部から離間したブーム上面に回転自在な水平シーブ26,28を2枚備え、ウインチから引出されたワイヤロープは、ブーム先端シーブ群の中央部のシーブに掛回しての左または右側シーブ群に掛回した後前記水平シーブの一方に掛回されて折返し、ブーム先端シーブ群と右または左側シーブ群に掛回された後前記水平シーブの他方に掛回されて折返し、再びブーム先端シーブ群との左または右側シーブ群に掛回すようにした。
(もっと読む)
伸縮ブーム
【課題】ブーム上面がその上方の障害物に衝突することを防止するかあるいは損傷を軽減できる構成の伸縮ブームを提供する。
【解決手段】断面のサイズが異なる複数本の筒型をなす分割ブーム9〜11を伸縮可能に組み合わせて伸縮ブーム7を構成する。分割ブーム9〜11の上面に、ブーム7の上方の障害物に衝突することにより変形するガード部材17、21、22を取付ける。ガード部材17、21、22が、そのガード部材17、21、22を取付けた分割ブーム9〜11の上面の位置を示唆する見切り部材を兼ねる。
(もっと読む)
軌道作業車両
【課題】 隣接軌道を走行する対向車両とブームとの接触を防止して安全性を確保しながら、作業領域を広げて作業性を向上させる。
【解決手段】 伸縮式のブーム11を備え、このブーム11の中心線Yが機体中心線Xに対してオフセットした軌道作業車両において、最大旋回状態でブーム中心線Yが機体中心線Xに対して交差し、かつ、ブーム先端が、反オフセット側である隣接軌道側に予め設定された進入禁止領域Dに進入しないことを条件として上部旋回体2の旋回範囲を制限するように構成した。
(もっと読む)
クレーンの免震支持方法及び装置
【課題】通常運転時におけるクレーンの支持を安定化させつつ、地震等の大きな振動の発生時にはクレーンの固有周期を長くすることができ、ステーからマストへ伝達される構築物の振動がクレーン自体の振動と同調することを回避し得、該クレーンの揺れを抑制し得るクレーンの免震支持方法及び装置を提供する。
【解決手段】構築物12と、該構築物12に沿って立設されたマスト2とを上下二段のステー13を介して連結し、該ステー13によりマスト2を補助的に支持すると共に、クライミングクレーン1に作用する水平方向加速度が設定値以上となった際、上段のステー13を切り離し、クライミングクレーン1の固有周期を長くする連結解除手段14を備える。
(もっと読む)
高所作業ユニットを着脱可能な移動式クレーン
【課題】 移動式クレーンXの伸縮ブーム51の先端に高所作業ユニット50を取付けて高所作業車として使用する場合には、移動式クレーンとして使用できない構造とする必要がある。
【解決手段】 移動式クレーンのアクチュエータ73を制御するコントローラ60の制御モードをクレーン作業モード又は高所作業モードに切換えるようにすると共に、そのモード切換えを適切な条件で行うことにより、高所作業車モードに切換わった場合には移動式クレーンのウインチの作動を規制すると共に、ウインチ以外のアクチュエータの作動速度をクレーン作業モードにおける作動速度よりも低速となるよう制御する。
(もっと読む)
機器搬入出システム
【課題】設置が容易でしかも安価な移動クレーンによる機器、制御盤の搬入、搬出システムを提供する。
【解決手段】搬入、搬出建物近傍の固定位置に既知寸法の基準構造物(基準直方体、基準正方形、基準ポール)を設置し、既知寸法を持つクレーンにより吊り上げられた搬入、搬出品の各座標軸に関連した既知寸度とともに撮像する。取得された画像データに対して搬入或いは搬出位置、搬入或いは搬出品を画像上でマウス、ライトペン、キーボード等により指示することにより演算処理を施し、基準構造物および既知寸度の3次元の位置関係、即ち基準構造物と搬入、搬出位置の3次元距離、基準構造物と搬入、搬出品の3次元距離とを求めることにより、搬入、搬出品の目標値である搬入、搬出位置との3次元偏差を計測する。この偏差により、移動クレーンの各駆動部を制御する。
(もっと読む)
シミュレーション装置
【課題】 移動式クレーンの好適な配置位置を計画するための情報を得る。
【解決手段】 建造物が存在するエリアに物品を搬入出する際に、使用する移動式クレーンの配置位置を求めるためのシミュレーション装置10であって、建造物の設置データ、物品の寸法形状データ、物品の搬入出位置、移動式クレーンの仕様データが入力可能とされた入力部16と、入力部16に入力されたデータに基づいて、移動式クレーンの配置位置を設定するクレーン位置設定部24と、移動式クレーンの動作領域を算出する動作領域算出部25と、動作領域算出部25で算出された移動式クレーンの動作領域に対する建造物占有領域の干渉率を算出する干渉率算出部26とを具備している。
(もっと読む)
伸縮式ブームを備えた架装車輌
【課題】 作業者が車輌本体に対する接地作業を怠ったとしても、車輌本体を強制的に接地することができ、作業者を不慮の感電事故から守ることができる伸縮式ブームを備えた架装車輌を提供する。
【解決手段】 伸縮式ブーム11を備えた架装車輌であって、車輌本体10に電気的に接続されると共に、少なくとも作業時に接地可能に構成されたアース体15と、該アース体15が接地される接地領域に向けて導電性の液体を吐出し、アース体15を強制的にアース接地させる強制接地手段2とを備えたことを特徴とする。
(もっと読む)
101 - 110 / 134
[ Back to top ]