
国際特許分類[G01B11/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 長さ,幅または厚み測定用 (1,947)
国際特許分類[G01B11/02]の下位に属する分類
点の座標測定によるもの (52)
移動体の長さまたは幅測定用に特に適合したもの (92)
厚み測定用 (668)
国際特許分類[G01B11/02]に分類される特許
101 - 110 / 1,135
ワーク寸法測定装置
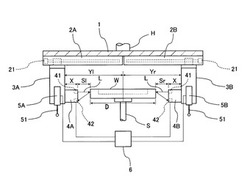
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
検出装置

【課題】確実に、かつ、高速に、合焦位置の検出を行う。
【解決手段】ラインセンサ25を構成するラインピクセル上の合焦時の光点像(レーザスポットS1)では、レーザ光の光量が絞られる調整制御が行われ、合焦ピクセルから離れた位置となる非合焦時の光点像(レーザスポットS2)では、レーザ光の光量が増加される調整制御が行われるように、あらかじめ定められたテーブルデータに従ったフィードフォワード制御が行われることで、確実に、かつ、高速に、合焦位置の検出を行うことができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
物流システムにおける自動計測装置
【課題】大量の輸送貨物量の発生する現代社会および今後において、物流の自動化、システム化はますます重要になっている。物流システムの効率化、コストダウンにおいて形状、寸法、重量、温度、色、模様などの物性、個別認識情報の一括計測、情報管理が自動化、システム化の要件であるが高速、軽量簡便な計測センサーを実現させ合理化を進める。
【解決手段】形状寸法計測センサーとしてCCDカメラ120〜122を利用し、重量計109その他のセンサー、装置を併用して形状、寸法、物性、個別管理情報の一括計測を可能にし、物流の自動化システム化を計る。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
従来技術によれば,試料に熱ダメージを与えることなく,短時間で高感度に欠陥検出・寸法算出することが困難であった。
【解決手段】
被検査対象物である試料の表面の領域を所定の照明条件にて照明する照明工程と、該試料を並進および回転させる試料走査工程と、該試料の照明領域から複数の方向に散乱する複数の散乱光のそれぞれを、前記試料走査工程における走査方向および該走査方向と概略直交する方向の各々について複数画素に分割して検出する散乱光検出工程と、前記散乱光検出工程において検出された複数の散乱光のそれぞれについて、該試料の概略同一領域から概略同一方向に散乱した散乱光を加算処理し、該加算処理した散乱光に基づき欠陥の有無を判定し、該判定された欠陥に対応する複数の散乱光のうち少なくとも一の散乱光を用いて該判定された欠陥の寸法を算出する処理工程と、を備える欠陥検査方法である。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段と、画像計測演算手段が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
三次元形状計測装置、部品移載装置および三次元形状計測方法
【課題】ライン状(線状)の撮像領域を用いて移動する計測対象物の撮像を行う際にも、高輝度な照明光を用いることなく明るい画像を取得することが可能な三次元形状計測装置を提供する。
【解決手段】この表面実装機100は、各々がX1方向に並べられるとともにX1方向と直交するY2方向にライン状に延びるライン状撮像領域63a〜63fを含み、部品120を撮像する二次元イメージセンサ63と、二次元イメージセンサ63に対してX1方向に相対的に移動する部品120に向けて正弦波状の光強度分布を有するパターン光Gを投影する照明部61と、二次元イメージセンサ63が、ライン状撮像領域63a〜63fを用いて部品120の領域P1を順次撮像する場合に、領域P1の画像信号を、投影されたパターン光Gが有する周期Lの2分の1の積分範囲dで積算する制御を行う撮像制御部73とを備える。
(もっと読む)
光学分光システムを使用するパラメトリック・プロフィーリング
【課題】回折格子の形状特徴物などの小寸法の形状特徴物のプロフィールを見出すためのシステムを提供する。
【解決手段】シード・プロフィールのギャラリが作られ、半導体装置についての製造プロセス情報を用いて該プロフィールに関連する初期パラメータ値が選択される。回折構造および関連するフィルムを測定するとき、反射率Rs,Rpなどのいろいろな放射パラメータおよび楕円偏光パラメータを使用することができる。放射パラメータのうちのあるものは、該プロフィールまたは該フィルムのパラメータ値の変化に対してより敏感な1つ以上の放射パラメータを選択してより精密な測定に到達することができる。プロフィール・パラメータのエラーを補正するために上述した手法をトラック/ステッパおよびエッチャに供給してリソグラフィおよびエッチングのプロセスを制御することができる。
(もっと読む)
検査装置における良品判定基準設定方法及び良品判定基準設定装置
【課題】検査対象物について検査装置を用いて得た検査計量値を基に検査対象物の良否を判定する検査装置において、検査対象物が良品であるか不良品であるかを判定する良品判定基準を設定する良品判定基準設定方法。
【解決手段】複数の良品について検査装置を用いて得た良品計量値の分布と、複数の不良品について検査装置を用いて得た不良品計量値の分布とを求め、前記良品計量値の分布と、前記不良品計量値の分布とを、横軸を検出画素数、縦軸をサンプル数として同一の画面上に表示し、当該同一の画面上において両者を比較して、上限の良品判定基準を、前記良品計量値の分布において上限側における不良品計量値の分布の下限より小さなものに設定し、下限の良品判定基準を、下限側における不良品計量値の分布の上限より大きなものに設定する。
(もっと読む)
乗員検知装置
【課題】乗員とチャイルドシートとの存在を精度良く判定する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員の頭部領域を検知する頭部領域検知部52およびシートの領域を検知するシート領域検知部53と、シートの領域を距離画像から除去して得られるシート領域除去画像に基づき、頭部領域を有する乗員領域の体積を推定し、該体積が所定体積範囲内であるか否かを判定する体積判定部54と、乗員領域の体積が所定体積範囲内であると判定された場合に、頭部領域の断面画像と乗員領域の断面画像とを比較し、乗員の肩部の有無を判定し、乗員の肩部が存在すると判定された場合には乗員領域には大人が存在すると判定し、乗員の肩部が存在しないと判定された場合には乗員領域にはチャイルドシートおよび該チャイルドシートに着座した子供が存在すると判定する乗員判定部56とを備える。
(もっと読む)
欠陥検査方法及びその装置
【課題】
複数の方向に配置した複数の検出器からの信号を基板の高さ変動の影響を受けることなく処理して基板上のより微細な欠陥を検出することを可能にする。
【解決手段】
第1の集光検出手段と第2の集光検出手段とにそれぞれ複数列の光センサアレイを有する光電変換器を備え、処理手段は第1及び第2の集光検出手段のそれぞれの複数列の光センサアレイからの検出信号を用いて試料の表面に対する第1及び第2の集光検出手段の焦点位置のずれを求め、この求めた第1及び第2の集光検出手段のそれぞれの焦点位置のずれに応じて第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを補正し、この補正した第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを統合して試料上の欠陥を検出するようにした。
(もっと読む)
101 - 110 / 1,135
[ Back to top ]