
国際特許分類[G01N21/88]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 材料の化学的または物理的性質の決定による材料の調査または分析 (128,275) | 光学的手段,すなわち.赤外線,可視光線または紫外線を使用することによる材料の調査または分析 (28,618) | 特殊な応用に特に適合したシステム (7,977) | きず,欠陥,または汚れの存在の調査 (6,670)
国際特許分類[G01N21/88]の下位に属する分類
動いている材料,例.紙・織物,の中の (1,103)
容器中またはその内容物 (293)
染料,例.蛍光インク,の浸透を用いるもの (66)
検査用標準;キャリブレーション (68)
汚れ,例.塵埃,の調査 (89)
調査対象物の材質や形に特徴付けられるもの (3,597)
国際特許分類[G01N21/88]に分類される特許
131 - 140 / 1,454
表面検査装置
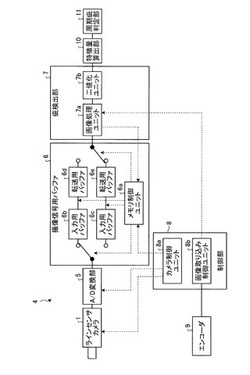
【課題】被検査体の移動速度が大幅に変化する場合でも、被検査体上の疵を安定して検出する。
【解決手段】移動する被検査体2から反射された光を受光するラインセンサカメラ1と、ラインセンサカメラ1から一定周期で出力される撮像信号を一時記憶する撮像信号用バッファ6と、被検査体2の移動距離を検出するロータリエンコーダ9と、ロータリエンコーダ9によって検出された被検査体2の移動距離が所定間隔に達した時点で、撮像信号用バッファ6に一時記憶されている撮像信号を読み出す制御を行う画像取り込み制御ユニット8bと、撮像信号用バッファ6から読み出された撮像信号から被検査体の表面の疵候補点を検出する疵検出部とを備える表面検査装置。
(もっと読む)
内部欠陥検査方法及びその装置

【課題】
試料表面に非接触で超音波励起を行い、超音波を励起した点を光干渉計測する手段を用いた非接触で試料内部の観察を行うことにより、稼動部分が無く、コンパクトな構成で、高感度で非破壊・非接触に内部欠陥を検査する。
【解決手段】
検査対象の試料から離れた場所から超音波を発射してこの超音波を試料に照射し、この試料の表面の超音波が照射された箇所に偏光の状態が制御された偏光光を照射し、この偏光光が照射された試料の表面からの反射・散乱光のうち照射した偏光光と同じ偏光特性を持つ光を光検出器で検出し、この光検出器で検出した信号を処理して試料の内部の欠陥を検出する内部欠陥検査方法及びその装置とした。
(もっと読む)
表面汚染測定法
【課題】 コーティングを光学表面に施す前に、該光学表面の洗浄度を測定する方法を提供する。
【解決手段】 (a)予め洗浄された光学系10を提供する。選択されたコーティングで被覆すべき、光学系10の表面を洗浄する。(b)UVO洗浄された光学系12を提供するために、洗浄が1〜3分間の範囲の時間に亘りUVO洗浄を使用して行われる。(c)蛍光分光計を使用して、光学系12の蛍光スペクトルを測定し、測定された蛍光スペクトルを、許容される蛍光スペクトルを有する標準光学系16のスペクトルと比較する。(d)光学系12の測定されたスペクトルが許容される場合、洗浄された表面を選択されたコーティングで被覆すべき洗浄された光学系12を送る。または、光学系12の測定されたスペクトルが許容されない場合、測定されたスペクトルが、光学系12の表面にコーティングを施すのに許容されるまで、工程(b)および(c)を繰り返す。
(もっと読む)
表面検査装置
【課題】スリット光によって測定対象物に形成される光切断線における干渉縞を低減して良好に表面測定が行われる表面検査装置を構成する。
【解決手段】半導体レーザLDからのレーザ光LBから直線状の領域に拡がるスリット光Sを作り出してワークに照射し、これを撮影ユニットで撮影した画像データからスリット光Sが照射された光切断線を抽出してワークの表面形状データを生成するように表面検査装置を構成する。半導体レーザLDが、PN接合型で接合面の境界部分に沿って直線方向Mに形成される発光層17を有し、この直線方向Mが、スリット光Sの拡がり方向と直交するように相対的な姿勢を設定した。
(もっと読む)
表面欠陥検知方法
【課題】物体の表面欠陥を容易に検知することができる表面欠陥検知方法を提供する。
【解決手段】表面欠陥検知装置1を用いて物体10の表面欠陥を検知する場合、まず、撮像部2により、物体10の表面10aの画像を取得する。続いて、画像解析部3により、当該画像の明度のヒストグラムを生成し、このヒストグラムにおける第1及び第2階調の間の中央値を二値化レベルに設定する。そして、画像解析部3により、設定した二値化レベルで画像11に二値化処理を施す。これにより、表面欠陥を目視でも判別可能な物体10の表面10aの画像が取得されることとなる。
(もっと読む)
シート材の方向検出方法及び装置、並びにシート材の切断方法、欠陥検査方法及びプリント方法
【課題】シート材に形成されたレンチキュラレンズの傾き方向と角度とを検出する。
【課題を解決するための手段】多数のレンズ14が表面に形成されたウエブ11に対して、その垂直方向から幅広にしたスポット光SPを照射する。ウエブ11から下方に離れ、またスポット光SPの光軸SPLから搬送幅方向に離してラインセンサ22を配置してある。このラインセンサ22により、搬送幅方向に対する屈折光TPのずれを直線方向のずれとして検出する。この検出結果に基づいて、スポット光SPの光軸回りに回転した屈折光TPの傾き方向,角度θを判定部23によって特定し、その特定した傾き方向,角度θをレンズの傾き方向,角度θとする。
(もっと読む)
欠陥検査装置および欠陥検査方法
【課題】
欠陥信号を低下させて欠陥を見逃してしまうことのない欠陥検査装置および欠陥検査方法と提供する。
【解決手段】
表面にパターンが形成された検査対象物に光を照射し、この光が照射された検査対象物から発生する反射、回折、散乱光を集光して第1の遮光パターンを備えた第1の空間フィルタを透過した光による第1の光学像を第1の検出器で受光して第1の画像を取得し、光が照射された検査対象物から発生する反射、回折、散乱光を集光して第2の遮光パターンを備えた第2の空間フィルタを透過した光による第2の光学像を第2の検出器で受光して第2の画像を取得し、取得した第1の画像と第2の画像を統合的に処理して欠陥候補を判定する欠陥検査方法及びその装置とした。
(もっと読む)
マハラノビス基準空間の生成方法、検査方法及び検査装置
【課題】MT法を利用して検査品の良否判定を行う技術において、良否判定をするための処理時間を短縮し、なおかつ検査品に偏りがある場合であっても、良否判定を精度良く行うこと。
【解決手段】マハラノビス距離を算出するためのマハラノビス基準空間の生成にあたり、先ず、良品サンプルの良品画像を取得する(S1)。次いで、その良品画像に対して、2値化処理→平滑処理→差分処理の画像処理を施して、良品画像に含まれる、他の領域に比べて良品の程度が劣る良品グレー領域を検出する(S2)。次いで、検出した良品グレー領域の輝度分布データを算出する(S3)。次いで、その輝度分布データに基づいて、マハラノビス基準空間を生成する(S4)。
(もっと読む)
検出装置
【課題】合焦精度を向上させる。
【解決手段】高感度のラインセンサ16Bは、レーザ照明部11により照明された対象物2の光点像の光量から得られる高輝度の受光データを取得し、低感度のラインセンサ16Aは、対象物2の光点像の光量から得られる低輝度の受光データを取得し、データ処理部17は、正常時は、高感度のラインセンサ16Bからの高輝度の受光データを選択し、高輝度の受光データを得るときのレーザ光が飽和した場合、低輝度の受光データを選択する。そして、検出部18は、データ処理部17により選択された受光データに基づいて、対象物2の像の合焦状態を検出することで、対象物2の像の合焦状態が確実に検出されるので、合焦精度を向上させることができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
マハラノビス基準空間の生成方法及び検査装置
【課題】検査品の画像のマハラノビス距離に基づいてその検査品の良否判定を行う技術において、良否判定をするための処理時間を短縮し、なおかつ画像の写り具合に関わらず精度良くその判定を行うこと。
【解決手段】マハラノビス距離を算出するためのマハラノビス基準空間の生成にあたり、先ず、良品か否かの区別が付きにくい良品グレー領域を含む良品サンプルの良品画像を取得する(S1)。次いで、その良品画像に対して、2値化処理→平滑処理→差分処理の画像処理を施して、良品画像に含まれる良品グレー領域を検出する(S2)。次いで、検出した良品グレー領域の周辺領域の輝度情報を基準として、その良品グレー領域の輝度情報の特徴量を算出する(S3)。次いで、その特徴量に基づいて、マハラノビス基準空間を生成する(S4)。
(もっと読む)
131 - 140 / 1,454
[ Back to top ]