
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
21 - 30 / 276
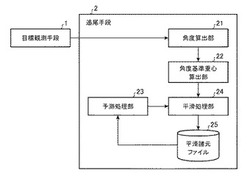
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
指示支援装置

【課題】本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関し、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できることを目的とする。
【解決手段】到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段とを備える。
(もっと読む)
レーダ装置
【課題】レーダ装置において生成する物標情報の信頼性を向上させること。
【解決手段】方位解析処理では、角度差絶対値abが閾値α以下となる到来波の組合せがあれば(S390:YES)、その組合せを構成する到来波についての到来方位θA,θBの中間地点を仮想方位とし、その仮想方位に受信波ビームを向けたときの電力を、仮想電力として導出する(S400)。その仮想方位及び仮想電力を方位情報の1つとして、到来波の各々についての到来方位θ及び到来電力(即ち、方位情報)に加えて登録する(S420)。つまり、方位解析処理では、複数の到来波に対する各到来方位のうち、隣接する2つの物標からの到来波に対する到来方位の間の角度範囲が分離能以下となる場合には、より確からしい方位情報として仮想方位及び仮想電力を導出し、物標認識処理にてペアマッチングを実行する際に用いる。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
衛星搭載用マイクロ波送信装置、該装置を用いる目標地域の追尾方法、及び制御プログラム
【課題】地球周回型の小型衛星に搭載することができて、かつ指向方向を連続して可変にできるようにする。
【解決手段】第1のアンテナホーン3aが、パラボラアンテナ4を介して、人工衛星の移動に伴って指向方向を矢印a,bのように変化させながら地球上の目標地域に第1のマイクロ波S5aを照射させる。第2のアンテナホーン3bは、第1のアンテナホーン3aがパラボラアンテナ4を介して目標地域に第1のマイクロ波S5aを照射しているとき、パラボラアンテナ4を介して第2のマイクロ波S5bを照射して次の目標地域を指向する。そして、第1のアンテナホーン3aがパラボラアンテナ4を介して目標地域への第1のマイクロ波S5aの照射を終えたとき、第1のアンテナホーンS5aは、直ちに、第2のアンテナホーン3bが指向した次の目標地域へ第1のマイクロ波S5aを照射させる。
(もっと読む)
ビーム管理装置及びこれを備えたレーダ装置並びにビーム管理方法及びプログラム
【課題】 特定のAPAAに割り当てられた追尾目標が増加した場合でも、他のAPAAの捜索性能を保ちながら、追尾目標に対する追尾ビームの照射頻度を維持する。
【解決手段】 ビーム管理装置10は、予め定められた捜索ビーム及び追尾ビームの照射タイミングからなる基本照射スケジュールaを記憶する基本照射スケジュール記憶手段11と、APAAに割り当てられた追尾目標bを入力する追尾目標入力手段12と、割り当てられた追尾目標bの数が増加し、予め定められた追尾ビームの数を越えた場合に、捜索ビームの照射に要する時間を短縮し、余った時間を追尾ビームの照射に利用するように照射スケジュールcを算出する照射スケジュール算出手段13と、を備えたことを特徴とする。
(もっと読む)
弾着観測装置
【課題】 従来の弾着観測装置は、追尾目標に対するビームの受信信号から水柱を検出し、弾着位置として観測していたが、弾丸が目標の近くに弾着した場合や波が荒れている場合、水柱が目標の陰に隠れてしまう場合等、水柱の検出が困難な状況では弾着位置を観測できず、追尾目標と弾着位置との誤差を出力できないことが課題であった。
【解決手段】 弾丸に対しビームを照射した受信信号から検出される弾丸の観測値をもとに弾丸の弾道を算出し、その高度が0となるときを弾着位置として算出するとともに、弾丸が水面に着弾したときに発生する水柱から弾着位置を算出する。
(もっと読む)
レーダ装置
【課題】対応関係がある分解能セルの信号同士を加算して、目標の信号電力を大きくすることができるようにする。
【解決手段】レーダAにおけるビーム走査領域内の各々の分解能セルを検定セルに設定し、検定セル毎に目標の運動仮説を生成する運動仮説生成部4と、運動仮説生成部4により生成された目標の運動仮説にしたがって各々の検定セルに対応するレーダBにおけるビーム走査領域内の分解能セルを特定する分解能セル特定部5と、分解能セル特定部5により特定された分解能セルを中心とする一定領域内の分解能セルの中で、信号検波部2により検波された信号の振幅値が最大の分解能セルを積分セルに決定する探索型積分セル決定部7とを設ける。
(もっと読む)
レーダ信号処理装置
【課題】 一定時間間隔でレーダ信号処理装置にデータが入力されるが、レーダ信号処理装置で同時に信号処理可能なデータ数以上の数のデータが入力される場合、信号処理を割り当てる演算部が信号処理中のため割当できず、入力されたデータのシステム的な重要度に関わらず破棄され、その場合にシステム的に重要度が高いデータ破棄されることにより、信号処理ができないことが問題となる。
【解決手段】 レーダ信号処理装置内の信号処理結果から、将来入力されるデータの入力および信号処理時間を予測し、入力されるデータを予測する度に信号処理を実施する演算部の稼働率が向上するように割当を変更することで、データの信号処理終了時刻が早くなり、かつ処理データ数を最大とする計画的な負荷分散制御を行う。
(もっと読む)
目標追跡装置
【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させた目標追跡装置を得る。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部2aを備える。
(もっと読む)
21 - 30 / 276
[ Back to top ]