
国際特許分類[G01S13/74]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の再放射を使用する方式,例.二次レーダ方式;類似の方式 (999)
国際特許分類[G01S13/74]の下位に属する分類
受信波から電力供給を受ける応答機を使用するもの,例.受動的応答機を使用するもの (109)
パルス形信号を送信するもの (203)
ランダム符号信号またはランダムパルス繰返数を使用する方式 (108)
持続形信号を送信するもの (23)
国際特許分類[G01S13/74]に分類される特許
161 - 170 / 556
電子式識別システム
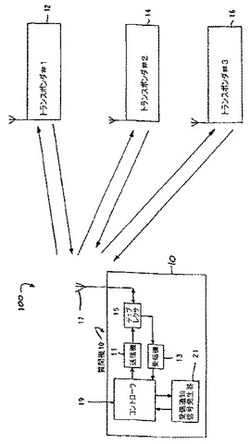
【課題】 本発明は、一台の質問機10と、複数のトランスポンダ12、14および16とを備える電子身元確認システム100に関する。
【解決手段】 質問機は、トランスポンダに質問信号を送信するための送信機11と;トランスポンダから応答信号を受信するための受信機13と;その各応答信号により、トランスポンダの身元を確認するために、受信した応答信号を処理するためのコントローラ19とを備える。各トランスポンダは、そのトランスポンダの特性を含む署名を発生するための署名発生器35、32を備え、質問信号に応えて、署名を含む応答信号を間欠的に送信する。質問機は、さらに、トランスポンダの中の一台から応答信号を受信した場合に、質問機11により送信する受信通知信号を発生するための受信通知信号発生器21を備える。受信通知信号は、それにより応答信号の受信を知らせるために、署名を含む。
(もっと読む)
緊急応答システム

【課題】質問側からの呼び掛けに応答側から応答が得られなかったとき、その理由が質問側で判明できるようにした緊急応答システムを提供すること。
【解決手段】質問機システム8から質問信号を送信し、航空機に搭載された応答機1から質問信号に対する応答信号を質問機システム8に送信するシステムにおいて、質問側の無線機9とは別の第1の無線機9と、応答機1に備えられている無線部2とは別に航空機に備えられた第2の無線機7を備え、応答機1に故障が発生したとき、第2の無線機7と第1の無線機9を介して通信を行い、応答機1に故障が発生したことが質問機システム8に通知され、レーダ卓の表示部10に表示されるようにしたもの。
(もっと読む)
非接触IC媒体通信装置、指向方向切替アンテナ装置、および非接触IC媒体存在方向判別方法
【課題】RFIDタグ50の存在方向を高速に検知する。
【解決手段】アンテナ部30bと、指向方向制御部30aと、デジタル制御回路11を備えた非接触通信装置1について、前記指向方向制御部30aは、RFIDタグ50からの信号を受信開始してから受信終了するまでの間にアンテナ部の指向方向を切り替える指向方向切替処理(ステップS2〜S8,S31〜S39,S42〜S49)を実行する構成であり、前記デジタル制御回路11は、各指向方向での受信レベルに基づいて前記RFIDタグ50の存在方向を判別する存在方向判別処理(ステップS16〜S20)と、前記アンテナ部30bの指向方向を切り替えつつRFIDタグ50から受信した一連の信号から前記RFIDタグ50の応答データを取得する応答データ取得処理(ステップS21)とを実行する構成とした。
(もっと読む)
入退室管理システム
【課題】 UHF帯RFIDを用いた入退室管理システムにおいて、アンテナから出力されるリーダライタの電波が、入退者が所持する電子機器に影響を与えず、且つアンテナの設置位置の制約がない入退室管理システムを提供する。
【解決手段】 入退者5とアンテナ4との距離を測距センサ1により測定し、アンテナ4からの距離が第一の閾値未満である第一のエリアに入退者5がいる場合は、リーダライタ9の電波の出力を停止する。
(もっと読む)
建築物診断システム
【課題】電力消費電力を削減し、使い勝手が良く、小型化や安全性の面で優れた建築物診断システムを実現する。
【解決手段】複数の同軸ケーブル40によりタンデム状に接続された中継モジュール10、及び複数のセンサ26付きのRFIDモジュール20−1,20−2,・・・により構成されて壁等に埋設される伝送路と、リーダ/ライタモジュール50との間に、中継モジュール10を設け、その伝送路とリーダ/ライタモジュール10とを分離している。前記伝送路は、使用しない時には、給電の必要がない。使用時に、リーダ/ライタモジュール10から中継モジュール10を介して前記伝送路へ給電される。RFIDモジュール20に接続されたセンサ26の検知信号は、前記伝送路及び中継モジュール10を介してリーダ/ライタモジュール10にて読み取る。
(もっと読む)
衛生状態監視管理システム及び方法
個人及び会社が自身の周囲環境の衛生状態を管理及び監視するためのリアルタイムロケーション特定システム(RTLS)衛生状態監視管理システム。本発明のいくつかの実施形態では、RTLSは、部屋及び表面の清潔度並びに清掃用品及び清掃職員のロケーションを監視及び管理するのに用いられる。本発明は、衛生サービスの改善された効率性及び品質を提供する。例えば、本発明は、清掃の優先順位付けを可能にすることができ、清掃用品及び清掃職員の効率的な使用を改善することができ、短期及び長期の清掃作業を追跡することができ、有効でない清掃に対して見識を提供することができる。 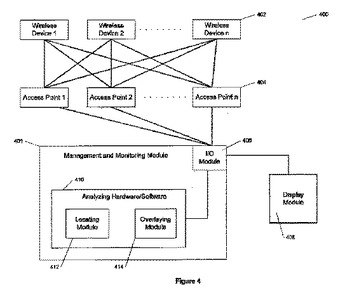 (もっと読む)
(もっと読む)
疑似目標除去装置および移動体自動識別装置
【目的】本発明は、目標からレーダに到来した受信波を処理し、実質的に同じ目標による重複した反射に起因して識別される複数の目標を一本化する疑似目標除去装置と、搭載された移動体の識別情報に併せて上記一本化の拠り所となる情報を無線伝送路を介して外部に通知する移動体自動識別装置とに関し、ハードウェアの構成が大幅に変更されることなく、目標の識別精度を高め、かつ安定に維持することを目的とする。
【解決手段】目標が位置する領域を識別する領域識別手段と、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段とを備える。
(もっと読む)
マルチオブジェクト測位システムおよび電力制御ベースの多重アクセス制御方法
【課題】既存のENとHNの問題を効果的に解決し、かつ信号の衝突を解決し、システムの時空間再使用性能を改善することが可能である多重アクセスコントロール方法を提供。
【解決手段】オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含む。タグ装置は、測位装置の状態情報を記録する測位装置リストを有する。タグ装置が、チャネル要求パケット(CRP)を間欠的に送信し、idle状態でかつCRPを受信した測位装置が、有効範囲内に、測位装置によって受信したCRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信し、CAPを受信したタグ装置が、CAPの内容に応じて記憶した前記測位装置リストを更新し、タグ装置が測位装置リストを参照してCRPの送信電力を調節する。
(もっと読む)
測位方法およびシステム
【課題】リーダをタグに近接させる動作が不要であり、分散配置される多数の無線タグを他のシステムと未接続の自律状態とできる測位方法およびシステムを提供する。
【解決手段】携帯無線端末2において、測位要求部21は、ユーザUによる測位指示のキー入力操作などを検知して測位要求を送信する。応答受信部22は、測位要求を受信した各無線タグ1から返信される測位応答を受信する。応答時間計測部23は、例えば測位要求の送信時刻から各測位応答の受信時刻までの経過時間を応答時間ΔTとして計測する。位置情報抽出部24は、各測位応答に記述されている各無線タグ1の設置位置Pを抽出する。測位部25は、各無線タグ1の応答時間ΔTおよび各無線タグ1の設置位置Pに基づいて自端末2の現在位置P0を算出する。出力部26は、前記測位の結果を表示出力または音声出力する。
(もっと読む)
無線測距システム、及び、無線端末
【課題】UWB通信方式を用いる場合に、距離精度を向上する無線測距システム、及び、無線端末を提供すること。
【解決手段】無線端末200において、測距動作と同期確立動作とで信号の経路が異なり、測距動作が行われる際には、コンパレータ208に対して検波結果が積分器204を経由することなく入力される。これにより、無線端末200の測距動作に積分処理が含まれないので、積分処理による遅延時間が発生せず、距離測定の精度を向上することができる。また、測距動作において、コンパレータ208で用いられる比較基準電圧には、積分器204で得られた積分結果が用いられる。これにより、検波信号からノイズ信号成分が取り除かれた積分結果を比較基準電圧として用いるので、比較基準電圧が適正化される。この結果、距離測定の精度をさらに向上することができる。
(もっと読む)
161 - 170 / 556
[ Back to top ]