
作業機械
【課題】所定の条件が満たされてエンジンのアイドリングが停止した後、再びエンジンを始動させるために特別な操作が不要な作業機械を提供する。
【解決手段】アイドルストップ機能によりエンジン110の運転を一時停止させた後、右手側検出センサ261で右手侵入エリアにオペレータの手が侵入したことが検出され、かつ、左手側検出センサ262で左手侵入エリアにオペレータの手が侵入したことが検出されると、エンジン110を再始動させるように構成した。これにより、アイドルストップ機能によりエンジン110の運転を一時停止させた後、再びエンジン110を始動させるために特別な操作が必要ないので、作業効率が向上する。
【解決手段】アイドルストップ機能によりエンジン110の運転を一時停止させた後、右手側検出センサ261で右手侵入エリアにオペレータの手が侵入したことが検出され、かつ、左手側検出センサ262で左手侵入エリアにオペレータの手が侵入したことが検出されると、エンジン110を再始動させるように構成した。これにより、アイドルストップ機能によりエンジン110の運転を一時停止させた後、再びエンジン110を始動させるために特別な操作が必要ないので、作業効率が向上する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段を備えた作業機械に関する。
【背景技術】
【0002】
燃料消費量を削減するため、所定の条件を満たすとエンジンのアイドリングを停止させる機能を有する建設機械が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】再公表WO2005/054649号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上述した特許文献に記載の建設機械では、所定の条件が満たされてエンジンのアイドリングが停止した後、再びエンジンを始動させるためには、トリガ操作として、たとえばイグニッションスイッチを廻すなどの操作が必要であり、煩わしかった。
【課題を解決するための手段】
【0005】
(1) 請求項1の発明による作業機械は、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーと、右側操作レバーを操作する際にオペレータの右手が侵入する右手侵入エリアにオペレータの右手が侵入したことを検出する右手侵入検出手段と、左側操作レバーを操作する際にオペレータの左手が侵入する左手侵入エリアにオペレータの左手が侵入したことを検出する左手侵入検出手段と、アイドリング停止手段がエンジンのアイドリングを停止させた後、右手侵入検出手段でオペレータの右手が右手侵入エリアに侵入したことを検出し、かつ、左手侵入検出手段でオペレータの左手が左手侵入エリアに侵入したことを検出すると、エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする。
(2) 請求項2の発明は、請求項1に記載の作業機械において、右手侵入検出手段および左手侵入検出手段は、それぞれ非接触式のセンサであることを特徴とする。
(3) 請求項3の発明は、請求項2に記載の作業機械において、非接触式のセンサは、超音波センサであることを特徴とする。
(4) 請求項4の発明による作業機械は、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーと、右側操作レバーにオペレータの手が触れたことを検出する右側接触検出手段と、左側操作レバーにオペレータの手が触れたことを検出する左側接触検出手段と、アイドリング停止手段がエンジンのアイドリングを停止させた後、右側接触検出手段でオペレータの手が右側操作レバーに触れたことを検出し、かつ、左側接触検出手段でオペレータの手が左側操作レバーに触れたことを検出すると、エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする。
(5) 請求項5の発明は、請求項4に記載の作業機械において、右側接触検出手段および左側接触検出手段は、それぞれ右側操作レバーおよび左側操作レバーに触れるオペレータの手の接触圧力を検出する感圧スイッチであることを特徴とする。
【発明の効果】
【0006】
本発明によれば、所定の条件が満たされてエンジンのアイドリングが停止した後、再びエンジンを始動させるために特別な操作が必要ないので、作業効率が向上する。
【図面の簡単な説明】
【0007】
【図1】移動式クレーン(クローラクレーン、クレーン)の外観側面図である。
【図2】運転室の全体を示す斜視図である。
【図3】運転室を上方から見た図である。
【図4】左側レバー(旋回レバー)を示す図である。
【図5】モニタパネルを示す図である。
【図6】エンジンキースイッチを示す図である。
【図7】本実施の形態のアイドルストップ機能についての全体構成を示す図である。
【図8】エンジンの一時停止処理の動作について説明するフローチャートである。
【図9】エンジンの一時停止後の再始動処理の動作について説明するフローチャートである。
【発明を実施するための形態】
【0008】
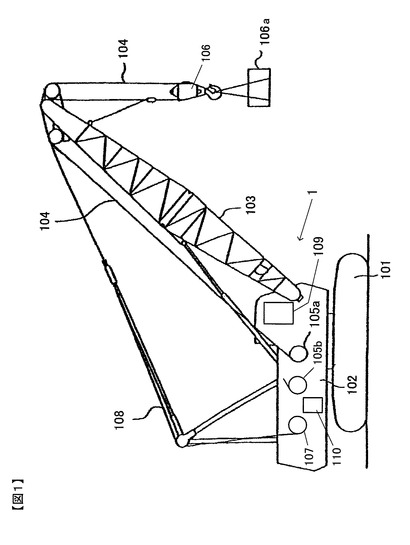
図1〜9を参照して、本発明による作業機械の一実施の形態を説明する。図1は、本実施の形態の作業機械の一例である移動式クレーン(クローラクレーン)の外観側面図である。図1に示すように、移動式クレーン(以下、単にクレーンと呼ぶ)1は、履帯式の走行体101と、走行体101上に搭載された旋回可能な旋回体102と、旋回体102に起伏可能に支持されたブーム103とを有する。旋回体102には、クレーン1の動力源であるエンジン110と、2つのウインチドラム(フロントドラム105aおよびリヤドラム105b)とが搭載されている。フロントドラム105aの駆動によりフロントドラムワイヤロープ104が巻き上げまたは巻き下げられ、主フック106に吊り下げられた吊り荷(掘削用バケット等)106aが昇降する。なお、図1では、リヤドラム105bの駆動により巻き上げまたは巻き下げられるリヤドラムワイヤロープやリヤドラムワイヤロープによって昇降される補フック等の記載を省略している。
【0009】
また、旋回体102にはブーム起伏ドラム107が搭載され、ブーム起伏ドラム107の駆動によりブーム起伏ロープ108が巻き上げまたは巻き下げられ、ブーム103が起伏される。109は、旋回体102に設けられたクレーン1の運転室である。
【0010】
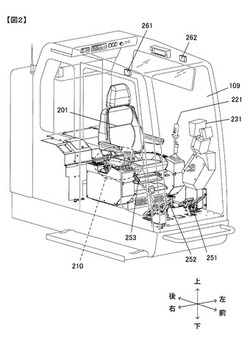
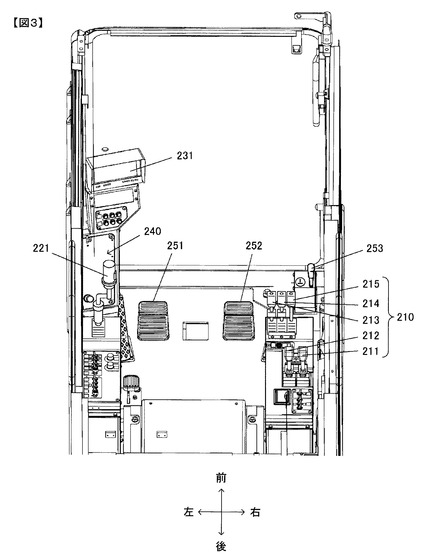
図2は運転室109の全体を示す斜視図であり、図3は運転室109を上方から見た図である。運転室109には、オペレータが着座する運転席201と、運転席201に着座したオペレータが右手で操作する右側レバー群210と、運転席201に着座したオペレータが左手で操作する左側レバー(旋回レバー)221とが設けられている。また、運転席201の左前方には、表示装置231と、モニタパネル240とが設けられ、運転席201の右前方には、ゲートロックレバー253が設けられている。なお、運転室109の床には、フロントドラム105aを制動するためのフロントドラムブレーキペダル251と、リヤドラム105bを制動するためのリヤドラムブレーキペダル252とが設けられている。
【0011】
右側レバー群210は、走行レバー211,212と、フロントドラムレバー213と、リヤドラムレバー214と、ブーム起伏ドラムレバー215とを含む。走行レバー211,212は、前後方向に揺動させることで右側および左側の走行体101をそれぞれ操作するための操作レバーである。フロントドラムレバー213は、前後方向に揺動させることでフロントドラム105aを操作するための操作レバーであり、リヤドラムレバー214は、前後方向に揺動させることでリヤドラム105bを操作するための操作レバーである。ブーム起伏ドラムレバー215は、前後方向に揺動させることでブーム起伏ドラム107を操作するための操作レバーである。
【0012】
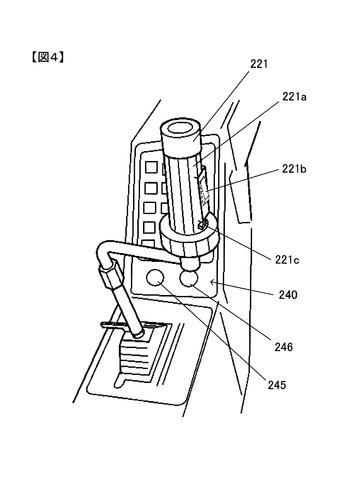
左側レバー、すなわち旋回レバー221は、前後方向に揺動させることで旋回体102の旋回操作をするための操作レバーである。なお、旋回レバー221には、図4に示すように、アクセルグリップ221aと、旋回ブレーキスイッチ221bと、ホーンスイッチ221cとが設けられている。アクセルグリップ221aは、オペレータが左手で握った状態で、上から見たときに時計方向または反時計方向に回転させることでエンジン110の回転数を増減操作するための操作装置である。旋回ブレーキスイッチ221bは、旋回体102が旋回しないように保持する旋回ブレーキを掛けるか否かを選択するためのスイッチである。ホーンスイッチ221cは、機外の警笛(ホーン)を鳴らすためのスイッチである。
【0013】
荷の昇降などの際に機外の作業者に注意喚起するため、オペレータがホーンスイッチ221cを操作して機外の警笛を鳴らしたり、アクセルアクセルグリップ221aを操作してエンジン110の回転数を制御したりするため、クレーン1を運転するためには必ず左手で旋回レバー221を操作することとなる。また、荷の昇降や走行等、クレーン1を運転するためには必ず右手で右側レバー群210のいずれかの操作レバーを操作することとなる。すなわち、クレーン1を運転するためには、オペレータは右手で右側レバー群210のいずれかの操作レバーに触れると同時に、左手で左側レバー(旋回レバー)221に触れる。
【0014】
図5は、モニタパネル240を示す図である。モニタパネル240には、警告灯群241と、水温計242と、燃料計243と、アワーメータ244と、アイドルストップ機能オンオフスイッチ245と、エンジンキースイッチ246とが設けられている。警告灯群241は、クレーン1の各部の状態をオペレータに知らせるための各種の警告灯である。水温計242は、冷却水の温度を示す計器であり、燃料計243は、燃料の残量を示す計器であり、アワーメータ244は、クレーン1の積算稼働時間を示す計器である。
【0015】
アイドルストップ機能オンオフスイッチ245は、後述する所定の条件を満たすとエンジン110を一時的に停止させたり再始動させたりする機能(アイドルストップ機能)を有効にするか無効にするのかを選択するためのスイッチである。アイドルストップ機能オンオフスイッチ245がオンされるとアイドルストップ機能が有効となり、アイドルストップ機能オンオフスイッチ245がオフされるとアイドルストップ機能が無効となる。
【0016】
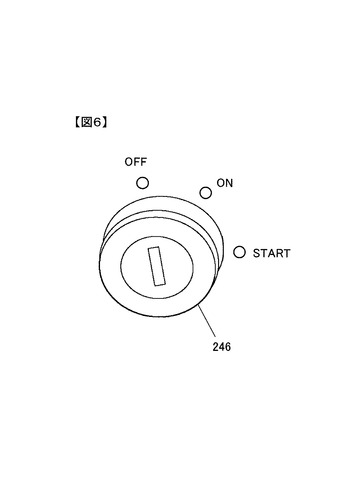
エンジンキースイッチ246は、エンジン110の始動または停止させるためのスイッチであり、不図示のエンジンキーが差し込まれて回転されることで、OFF位置(停止位置)、ON位置(運転位置)、START位置(始動位置)のいずれかの位置に切り換えられる(図5,6)。なお、エンジンキースイッチ246は、エンジンキーが差し込まれてオペレータによってSTART位置に回転させられた後、オペレータがエンジンキーから手を放すと、不図示のばねの付勢力によってON位置に切り換えられる。
【0017】
図2に示すように、運転室109の上部右側には右手側検出センサ261が設けられ、運転室109の上部左側には左手側検出センサ262が設けられている。右手側検出センサ261は、右側レバー群210のいずれかのレバーを操作する際にオペレータの右手が必ず侵入するエリア(右手侵入エリア)にオペレータの右手が侵入しているか否かを検出するためのセンサである。左手側検出センサ262は、左側レバー221を操作する際にオペレータの左手が必ず侵入するエリア(左手侵入エリア)にオペレータの左手が侵入しているか否かを検出するためのセンサである。右手側検出センサ261および左手側検出センサ262には、たとえば、光学式の変位センサが用いられるが、光電スイッチなどを用いてもよい。また、光学式の変位センサや光電スイッチの他に、超音波式の変位センサ等他の種類の非接触センサを用いてもよい。
【0018】
図7は、本実施の形態のアイドルストップ機能についての全体構成を示す図である。図7に示すように、クレーン1には、車体コントローラ30とエンジンコントローラ40とが設けられている。車体コントローラ30は、クレーン1の各部を制御するための制御装置であり、各種の演算を行うCPUや記憶装置であるメモリ、その他周辺機器等を有する。エンジンコントローラ40は、エンジン110を始動させる、所定の回転数で運転させる、停止させる等、エンジン110を制御するための制御装置であり、各種の演算を行うCPUや記憶装置であるメモリ、その他周辺機器等を有する。なお、本実施の形態の説明では、車体コントローラ30およびエンジンコントローラ40の機能に関し、後述するアイドルストップ機能について主に説明し、他の機能についての説明を省略する。
【0019】
車体コントローラ30には、上述したアイドルストップ機能オンオフスイッチ245と、エンジンキースイッチ246と、旋回ブレーキスイッチ221bと、右手側検出センサ261と、左手側検出センサ262と、スピーカ35とが接続されている。スピーカ35は、後述するようにアイドルストップ機能によってエンジン110を一時的に停止させる際に、停止の予告としての報知音を出力するための装置であり、たとえば、従来のクレーンにも取り付けられているラジオ用のスピーカと兼用される。
【0020】
−−−エンジン110の始動および停止について−−−
このように構成される本実施の形態のクレーン1では、旋回ブレーキスイッチ221bが掛かり位置にある場合にオペレータがエンジンキースイッチ246のキーシリンダに差し込んだ不図示のエンジンキーを回して、エンジンキースイッチ246をOFF位置からSTART位置に切り換えるとエンジン110が始動する。すなわち、車体コントローラ30は、旋回ブレーキスイッチ221bが掛かり位置にあることが検出され、かつ、エンジンキースイッチ246がSTART位置にされたことが検出されると、エンジンコントローラ40に始動信号を出力する。エンジンコントローラ40は車体コントローラ30からの始動信号を受信するとエンジン110を始動させる。
【0021】
オペレータがエンジンキーから手を放すと、上述したように不図示のばねの付勢力によってエンジンキースイッチ246がON位置に切り換えられる。車体コントローラ30は、エンジンキースイッチ246がON位置にされたことが検出されると、エンジンコントローラ40に運転信号を出力する。エンジンコントローラ40は車体コントローラ30からの運転信号を受信するとエンジン110の運転を継続させる。
【0022】
オペレータがエンジンキーを回して、エンジンキースイッチ246をOFF位置に切り換えると、エンジン110が停止する。すなわち、車体コントローラ30は、エンジンキースイッチ246がOFF位置にされたことが検出されると、エンジンコントローラ40への運転信号の出力を停止する。エンジンコントローラ40は車体コントローラ30からの運転信号を受信できなくなるとエンジン110を停止させる。
【0023】
−−−アイドルストップ機能について−−−
本実施の形態のクレーン1では、エンジン110の運転中に、次の条件が満たされると、エンジンキースイッチ246がON位置に切り換えられたままであってもエンジン110を一時的に停止させる。具体的には、エンジン110の運転中に旋回ブレーキスイッチ221bが掛かり位置にあり、かつ、アイドルストップ機能オンオフスイッチ245がオン位置にあり、かつ、エンジン110がアイドリング中であり、かつ、右手侵入エリアおよび左手侵入エリアのいずれのエリアにもオペレータの手が侵入していない状態が所定時間(たとえば3分)以上継続すると、エンジン110の一時停止を予告する警報音がスピーカ35から発せられる。その後も上記の状態が所定時間(たとえば30秒)以上継続すると、エンジン110が一時的に停止される。
【0024】
すなわち、車体コントローラ30は、次の条件(a)〜(f)の全てが満たされている場合に、タイマを起動する。
(a) エンジンキースイッチ246がON位置(運転位置)であることが検出されている。
(b) 旋回ブレーキスイッチ221bが掛かり位置にあることが検出されている。
(c) アイドルストップ機能オンオフスイッチ245がオン位置にあることが検出されている。
(d) エンジン110の設定回転数が最低回転数(アイドリング回転数)である。
(e) 右手側検出センサ261が右手侵入エリアにオペレータの手が侵入していることを検出していない。
(f) 左手側検出センサ262が左手侵入エリアにオペレータの手が侵入していることを検出していない。
【0025】
なお、車体コントローラ30は、タイマの起動後、上記の条件(a)〜(f)のいずれかが満たされなくなるとタイマを停止させて、計時時間をリセットする。車体コントローラ30は、起動したタイマの計時時間が所定時間T1(上述したようにたとえば3分)に達すると、エンジン110の一時停止を予告する報知音を出力するための信号(予告報知信号)をスピーカ35に出力する。その後、さらに所定時間T2(上述したようにたとえば30秒)経過して、タイマの計時時間がT1+T2(たとえば3分30秒)に達すると、車体コントローラ30は、エンジンコントローラ40への運転信号の出力を停止する。したがって、エンジンコントローラ40は車体コントローラ30からの運転信号を受信できなくなるのでエンジン110を停止させる。
【0026】
たとえば、オペレータがアイドルストップ機能オンオフスイッチ245をオフ位置に切り換えると、上記条件(c)が満たされなくなるので、エンジン110は停止されず運転が継続される。具体的には、オペレータが最初からアイドルストップ機能オンオフスイッチ245をオフ位置に切り換えておいた場合や、エンジン110の一時停止を予告する報知音を聞いたオペレータがアイドルストップ機能オンオフスイッチ245をオフ位置に切り換えた場合には、エンジン110は停止されず運転が継続される。
【0027】
−−−アイドルストップ後のエンジン110の再始動について−−−
上述したアイドルストップ機能によってアイドルストップ、すなわち、エンジン110が一時的に停止された後、次の条件のうち、少なくとも1つの条件が満たされるとエンジン110が再始動されて運転が継続される。具体的には、アイドルストップ機能オンオフスイッチ245がオフ位置に切り換えられるか、旋回ブレーキスイッチ221bが外れ位置に切り換えられるか、右手侵入エリアおよび左手侵入エリアのいずれかエリアにオペレータの手が侵入したことが検出されるとエンジン110が再始動されて、運転が継続される。
【0028】
すなわち、車体コントローラ30は、次の条件(α)〜(γ)のうち、少なくとも1つの条件が満たされると、エンジンコントローラ40に始動信号を出力する。したがって、エンジンコントローラ40は車体コントローラ30からの始動信号を受信するとエンジン110を始動させる。
(α) アイドルストップ機能オンオフスイッチ245がオフ位置にあることが検出された。
(β) 旋回ブレーキスイッチ221bが外れ位置にあることが検出された。
(γ) 右手側検出センサ261で右手侵入エリアにオペレータの手が侵入したことが検出され、かつ、左手側検出センサ262で左手侵入エリアにオペレータの手が侵入したことが検出された。
【0029】
ここで、エンジン110の再始動の条件として上記条件(γ)を挙げているが、その理由は次のとおりである。すなわち、上述したように、クレーン1を運転するためには、オペレータは左右の手で同時に、各操作レバーを操作する必要がある。そのため、オペレータが左右の手で同時に各操作レバーを操作すること(操作しそうであること、または、操作しようとする意思があること)を検出した時点で、既にエンジン110が運転されていることが望ましい。そこで、本実施の形態では、オペレータがクレーン1の運転を再開する直前にエンジン110を再始動できるように、上記条件(γ)を挙げている。
【0030】
なお、エンジンコントローラ40は、車体コントローラ30からの始動信号を受信してエンジン110を始動させ、エンジン110が再始動したことを検出すると、エンジン110が再始動したことを示す信号(再始動完了信号)を車体コントローラ30に出力する。車体コントローラ30は、上記の条件(α)〜(γ)のうち、少なくとも1つの条件が満たされて、エンジンコントローラ40に始動信号を出力した後、エンジンコントローラ40からの再始動完了信号を受信すると、エンジンコントローラ40に運転信号を出力する。したがって、エンジンコントローラ40は車体コントローラ30からの運転信号を受信するとエンジン110の運転を継続させる。
【0031】
−−−フローチャート−−−
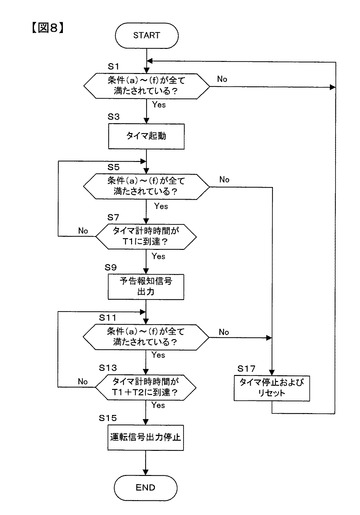
図8は、上述したアイドルストップ機能のうち、エンジン110の一時停止処理の動作について説明するフローチャートである。クレーン1のエンジン110の運転が開始されると、図8に示す処理を行うプログラムが起動されて車体コントローラ30で実行される。ステップS1において、上述した条件(a)〜(f)の全てが満たされるまで待機する。ステップS1が肯定判断されるとステップS3へ進み、タイマを起動してステップS5へ進む。
【0032】
ステップS5において、上述した条件(a)〜(f)の全てが満たされているか否かを判断する。ステップS5が肯定判断されるとステップS7へ進み、ステップS3で起動したタイマの計時時間が上述した所定時間T1に到達したか否かを判断する。ステップS7が否定判断されるとステップS5へ戻る。ステップS7が肯定判断されるとステップS9へ進み、予告報知信号をスピーカ35に出力してステップS11へ進む。ステップS11において、上述した条件(a)〜(f)の全てが満たされているか否かを判断する。ステップS11が肯定判断されるとステップS13へ進み、ステップS3で起動したタイマの計時時間が上述した所定時間T1+T2に到達したか否かを判断する。ステップS13が否定判断されるとステップS11へ戻る。ステップS13が肯定判断されるとステップS15へ進み、エンジンコントローラ40への運転信号の出力を停止して本プログラムを終了する。
【0033】
ステップS5が否定判断されるとステップS17へ進み、ステップS3で起動したタイマを停止させ、当該タイマをリセットしてステップS1へ戻る。ステップS11が否定判断されるとステップS17へ進む。
【0034】
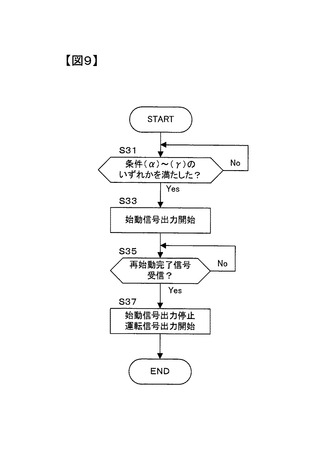
図9は、上述したアイドルストップ機能のうち、エンジン110の一時停止後の再始動処理の動作について説明するフローチャートである。図8で説明した処理の動作によってクレーン1のエンジン110が一時停止されると、図9に示す処理を行うプログラムが起動されて車体コントローラ30で実行される。ステップS31において、上述した条件(α)〜(γ)のうち、少なくとも1つの条件が満たされるまで待機する。ステップS31が肯定判断されるとステップS33へ進み、エンジンコントローラ40への始動信号の出力を開始してステップS35へ進む。
【0035】
ステップS35において、エンジンコントローラ40からの再始動完了信号を受信するまで待機する。ステップS35が肯定判断されるとステップS37へ進み、エンジンコントローラ40への始動信号の出力を停止し、運転信号の出力を開始して本プログラムを終了する。
【0036】
上述した実施の形態のクレーン1では、次の作用効果を奏する。
(1) アイドルストップ機能によりエンジン110の運転を一時停止させた後、右手側検出センサ261で右手侵入エリアにオペレータの手が侵入したことが検出され、かつ、左手側検出センサ262で左手侵入エリアにオペレータの手が侵入したことが検出されると、エンジン110を再始動させるように構成した。これにより、アイドルストップ機能によりエンジン110の運転を一時停止させた後、再びエンジン110を始動させるために特別な操作が必要ないので、作業効率が向上する。
【0037】
(2) 本実施の形態では、上述したように、エンジン110を再始動の条件として、右手側検出センサ261で右手侵入エリアにオペレータの手が侵入したことが検出され、かつ、左手側検出センサ262で左手侵入エリアにオペレータの手が侵入したことが検出されることとした。また、上述したように、クレーン1を運転するためには、オペレータは左右の手で同時に、各操作レバーを操作することとなる。したがって、アイドルストップ機能によりエンジン110の運転が一時的に停止された後、オペレータがクレーン1の運転を再開する直前にエンジン110を再始動できるので、再びエンジン110を始動させるための条件が適切なものとなる。すなわち、オペレータがクレーン1の操作をする意思がなく、偶然に右手侵入エリアおよび左手侵入エリアのいずれか一方のエリアにのみオペレータの手が侵入したとしても、エンジン110が再始動しないので、不必要なエンジン110の再始動を抑制でき、燃料消費量を抑制できる。
【0038】
(3) 右手侵入エリアおよび左手侵入エリアへオペレータの手が侵入したことを検出するセンサとして非接触センサを採用したので、操作レバーから離れた位置にセンサを配設できる。したがって、操作レバーの周囲の改造等の必要性が少なくなり、設計が容易でコスト増を抑制できる。
【0039】
(4) 右手側検出センサ261および左手側検出センサ262として光学式の変位センサや光電スイッチなどを用いるように構成したので、右手侵入エリアおよび左手侵入エリアへオペレータの手が侵入したことを簡単な構成で検出できるので、コスト増を抑制できる。
【0040】
−−−変形例−−−
(1) 上述の説明では、右手側検出センサ261および左手側検出センサ262として、たとえば、光学式の変位センサや光電スイッチなどの非接触センサを用いているが、本発明はこれに限定されない。たとえば、運転室109のたとえば上部にカメラを配設し、当該カメラで撮像して得られる画像に対して画像処理を行うことで、右手侵入エリアや左手侵入エリアにオペレータの手が侵入しているか否かの判断を行うように構成してもよい。
【0041】
(2) 上述の説明では、エンジン110の再始動条件(γ)として、右手侵入エリアや左手侵入エリアにオペレータの手が侵入したことを非接触センサによって検出しているが、本発明はこれに限定されない。たとえば、非接触センサに代えて、各レバーに感圧スイッチを設け、感圧スイッチのオンオフ状態に基づいて、レバーに手が触れているか否かを検出するようにしてもよい。そして、当該感圧スイッチによって右側レバー群210のいずれかの操作レバーに手が触れていることが検出され、かつ、旋回レバー221に手が触れていることが検出されたときに、エンジン110を再始動するように構成してもよい。また、感圧センサに代えて、たとえば、オペレータの手が触れたことによる静電容量の変化を検出するセンサなど、他の種類の接触式のセンサを用いてもよい。
【0042】
(3) 本発明は、上述した移動式クレーンに限らず、油圧ショベルやアースドリルなど、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーとを備え、作業時にはオペレータが左右の手で右側操作レバーと左側操作とを同時に操作することとなる各種の作業機械に適用できる。
(4) 上述した各実施の形態および変形例は、それぞれ組み合わせてもよい。
【0043】
なお、本発明は、上述した実施の形態のものに何ら限定されず、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーと、右側操作レバーを操作する際にオペレータの右手が侵入する右手侵入エリアにオペレータの右手が侵入したことを検出する右手侵入検出手段と、左側操作レバーを操作する際にオペレータの左手が侵入する左手侵入エリアにオペレータの左手が侵入したことを検出する左手侵入検出手段と、アイドリング停止手段がエンジンのアイドリングを停止させた後、右手侵入検出手段でオペレータの右手が右手侵入エリアに侵入したことを検出し、かつ、左手侵入検出手段でオペレータの左手が左手侵入エリアに侵入したことを検出すると、エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする各種構造の作業機械を含むものである。
また、本発明は、上述した実施の形態のものに何ら限定されず、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーと、右側操作レバーにオペレータの手が触れたことを検出する右側接触検出手段と、左側操作レバーにオペレータの手が触れたことを検出する左側接触検出手段と、アイドリング停止手段がエンジンのアイドリングを停止させた後、右側接触検出手段でオペレータの手が右側操作レバーに触れたことを検出し、かつ、左側接触検出手段でオペレータの手が左側操作レバーに触れたことを検出すると、エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする各種構造の作業機械を含むものである。
【符号の説明】
【0044】
1 移動式クレーン(クローラクレーン、クレーン)、30 車体コントローラ、40 エンジンコントローラ、110 エンジン、210 右側レバー群、211,212 走行レバー、213 フロントドラムレバー、214 リヤドラムレバー、215 ブーム起伏ドラムレバー、221 左側レバー(旋回レバー)、245 アイドルストップ機能オンオフスイッチ、261 右手側検出センサ、262 左手側検出センサ
【技術分野】
【0001】
本発明は、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段を備えた作業機械に関する。
【背景技術】
【0002】
燃料消費量を削減するため、所定の条件を満たすとエンジンのアイドリングを停止させる機能を有する建設機械が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】再公表WO2005/054649号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上述した特許文献に記載の建設機械では、所定の条件が満たされてエンジンのアイドリングが停止した後、再びエンジンを始動させるためには、トリガ操作として、たとえばイグニッションスイッチを廻すなどの操作が必要であり、煩わしかった。
【課題を解決するための手段】
【0005】
(1) 請求項1の発明による作業機械は、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーと、右側操作レバーを操作する際にオペレータの右手が侵入する右手侵入エリアにオペレータの右手が侵入したことを検出する右手侵入検出手段と、左側操作レバーを操作する際にオペレータの左手が侵入する左手侵入エリアにオペレータの左手が侵入したことを検出する左手侵入検出手段と、アイドリング停止手段がエンジンのアイドリングを停止させた後、右手侵入検出手段でオペレータの右手が右手侵入エリアに侵入したことを検出し、かつ、左手侵入検出手段でオペレータの左手が左手侵入エリアに侵入したことを検出すると、エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする。
(2) 請求項2の発明は、請求項1に記載の作業機械において、右手侵入検出手段および左手侵入検出手段は、それぞれ非接触式のセンサであることを特徴とする。
(3) 請求項3の発明は、請求項2に記載の作業機械において、非接触式のセンサは、超音波センサであることを特徴とする。
(4) 請求項4の発明による作業機械は、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーと、右側操作レバーにオペレータの手が触れたことを検出する右側接触検出手段と、左側操作レバーにオペレータの手が触れたことを検出する左側接触検出手段と、アイドリング停止手段がエンジンのアイドリングを停止させた後、右側接触検出手段でオペレータの手が右側操作レバーに触れたことを検出し、かつ、左側接触検出手段でオペレータの手が左側操作レバーに触れたことを検出すると、エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする。
(5) 請求項5の発明は、請求項4に記載の作業機械において、右側接触検出手段および左側接触検出手段は、それぞれ右側操作レバーおよび左側操作レバーに触れるオペレータの手の接触圧力を検出する感圧スイッチであることを特徴とする。
【発明の効果】
【0006】
本発明によれば、所定の条件が満たされてエンジンのアイドリングが停止した後、再びエンジンを始動させるために特別な操作が必要ないので、作業効率が向上する。
【図面の簡単な説明】
【0007】
【図1】移動式クレーン(クローラクレーン、クレーン)の外観側面図である。
【図2】運転室の全体を示す斜視図である。
【図3】運転室を上方から見た図である。
【図4】左側レバー(旋回レバー)を示す図である。
【図5】モニタパネルを示す図である。
【図6】エンジンキースイッチを示す図である。
【図7】本実施の形態のアイドルストップ機能についての全体構成を示す図である。
【図8】エンジンの一時停止処理の動作について説明するフローチャートである。
【図9】エンジンの一時停止後の再始動処理の動作について説明するフローチャートである。
【発明を実施するための形態】
【0008】
図1〜9を参照して、本発明による作業機械の一実施の形態を説明する。図1は、本実施の形態の作業機械の一例である移動式クレーン(クローラクレーン)の外観側面図である。図1に示すように、移動式クレーン(以下、単にクレーンと呼ぶ)1は、履帯式の走行体101と、走行体101上に搭載された旋回可能な旋回体102と、旋回体102に起伏可能に支持されたブーム103とを有する。旋回体102には、クレーン1の動力源であるエンジン110と、2つのウインチドラム(フロントドラム105aおよびリヤドラム105b)とが搭載されている。フロントドラム105aの駆動によりフロントドラムワイヤロープ104が巻き上げまたは巻き下げられ、主フック106に吊り下げられた吊り荷(掘削用バケット等)106aが昇降する。なお、図1では、リヤドラム105bの駆動により巻き上げまたは巻き下げられるリヤドラムワイヤロープやリヤドラムワイヤロープによって昇降される補フック等の記載を省略している。
【0009】
また、旋回体102にはブーム起伏ドラム107が搭載され、ブーム起伏ドラム107の駆動によりブーム起伏ロープ108が巻き上げまたは巻き下げられ、ブーム103が起伏される。109は、旋回体102に設けられたクレーン1の運転室である。
【0010】
図2は運転室109の全体を示す斜視図であり、図3は運転室109を上方から見た図である。運転室109には、オペレータが着座する運転席201と、運転席201に着座したオペレータが右手で操作する右側レバー群210と、運転席201に着座したオペレータが左手で操作する左側レバー(旋回レバー)221とが設けられている。また、運転席201の左前方には、表示装置231と、モニタパネル240とが設けられ、運転席201の右前方には、ゲートロックレバー253が設けられている。なお、運転室109の床には、フロントドラム105aを制動するためのフロントドラムブレーキペダル251と、リヤドラム105bを制動するためのリヤドラムブレーキペダル252とが設けられている。
【0011】
右側レバー群210は、走行レバー211,212と、フロントドラムレバー213と、リヤドラムレバー214と、ブーム起伏ドラムレバー215とを含む。走行レバー211,212は、前後方向に揺動させることで右側および左側の走行体101をそれぞれ操作するための操作レバーである。フロントドラムレバー213は、前後方向に揺動させることでフロントドラム105aを操作するための操作レバーであり、リヤドラムレバー214は、前後方向に揺動させることでリヤドラム105bを操作するための操作レバーである。ブーム起伏ドラムレバー215は、前後方向に揺動させることでブーム起伏ドラム107を操作するための操作レバーである。
【0012】
左側レバー、すなわち旋回レバー221は、前後方向に揺動させることで旋回体102の旋回操作をするための操作レバーである。なお、旋回レバー221には、図4に示すように、アクセルグリップ221aと、旋回ブレーキスイッチ221bと、ホーンスイッチ221cとが設けられている。アクセルグリップ221aは、オペレータが左手で握った状態で、上から見たときに時計方向または反時計方向に回転させることでエンジン110の回転数を増減操作するための操作装置である。旋回ブレーキスイッチ221bは、旋回体102が旋回しないように保持する旋回ブレーキを掛けるか否かを選択するためのスイッチである。ホーンスイッチ221cは、機外の警笛(ホーン)を鳴らすためのスイッチである。
【0013】
荷の昇降などの際に機外の作業者に注意喚起するため、オペレータがホーンスイッチ221cを操作して機外の警笛を鳴らしたり、アクセルアクセルグリップ221aを操作してエンジン110の回転数を制御したりするため、クレーン1を運転するためには必ず左手で旋回レバー221を操作することとなる。また、荷の昇降や走行等、クレーン1を運転するためには必ず右手で右側レバー群210のいずれかの操作レバーを操作することとなる。すなわち、クレーン1を運転するためには、オペレータは右手で右側レバー群210のいずれかの操作レバーに触れると同時に、左手で左側レバー(旋回レバー)221に触れる。
【0014】
図5は、モニタパネル240を示す図である。モニタパネル240には、警告灯群241と、水温計242と、燃料計243と、アワーメータ244と、アイドルストップ機能オンオフスイッチ245と、エンジンキースイッチ246とが設けられている。警告灯群241は、クレーン1の各部の状態をオペレータに知らせるための各種の警告灯である。水温計242は、冷却水の温度を示す計器であり、燃料計243は、燃料の残量を示す計器であり、アワーメータ244は、クレーン1の積算稼働時間を示す計器である。
【0015】
アイドルストップ機能オンオフスイッチ245は、後述する所定の条件を満たすとエンジン110を一時的に停止させたり再始動させたりする機能(アイドルストップ機能)を有効にするか無効にするのかを選択するためのスイッチである。アイドルストップ機能オンオフスイッチ245がオンされるとアイドルストップ機能が有効となり、アイドルストップ機能オンオフスイッチ245がオフされるとアイドルストップ機能が無効となる。
【0016】
エンジンキースイッチ246は、エンジン110の始動または停止させるためのスイッチであり、不図示のエンジンキーが差し込まれて回転されることで、OFF位置(停止位置)、ON位置(運転位置)、START位置(始動位置)のいずれかの位置に切り換えられる(図5,6)。なお、エンジンキースイッチ246は、エンジンキーが差し込まれてオペレータによってSTART位置に回転させられた後、オペレータがエンジンキーから手を放すと、不図示のばねの付勢力によってON位置に切り換えられる。
【0017】
図2に示すように、運転室109の上部右側には右手側検出センサ261が設けられ、運転室109の上部左側には左手側検出センサ262が設けられている。右手側検出センサ261は、右側レバー群210のいずれかのレバーを操作する際にオペレータの右手が必ず侵入するエリア(右手侵入エリア)にオペレータの右手が侵入しているか否かを検出するためのセンサである。左手側検出センサ262は、左側レバー221を操作する際にオペレータの左手が必ず侵入するエリア(左手侵入エリア)にオペレータの左手が侵入しているか否かを検出するためのセンサである。右手側検出センサ261および左手側検出センサ262には、たとえば、光学式の変位センサが用いられるが、光電スイッチなどを用いてもよい。また、光学式の変位センサや光電スイッチの他に、超音波式の変位センサ等他の種類の非接触センサを用いてもよい。
【0018】
図7は、本実施の形態のアイドルストップ機能についての全体構成を示す図である。図7に示すように、クレーン1には、車体コントローラ30とエンジンコントローラ40とが設けられている。車体コントローラ30は、クレーン1の各部を制御するための制御装置であり、各種の演算を行うCPUや記憶装置であるメモリ、その他周辺機器等を有する。エンジンコントローラ40は、エンジン110を始動させる、所定の回転数で運転させる、停止させる等、エンジン110を制御するための制御装置であり、各種の演算を行うCPUや記憶装置であるメモリ、その他周辺機器等を有する。なお、本実施の形態の説明では、車体コントローラ30およびエンジンコントローラ40の機能に関し、後述するアイドルストップ機能について主に説明し、他の機能についての説明を省略する。
【0019】
車体コントローラ30には、上述したアイドルストップ機能オンオフスイッチ245と、エンジンキースイッチ246と、旋回ブレーキスイッチ221bと、右手側検出センサ261と、左手側検出センサ262と、スピーカ35とが接続されている。スピーカ35は、後述するようにアイドルストップ機能によってエンジン110を一時的に停止させる際に、停止の予告としての報知音を出力するための装置であり、たとえば、従来のクレーンにも取り付けられているラジオ用のスピーカと兼用される。
【0020】
−−−エンジン110の始動および停止について−−−
このように構成される本実施の形態のクレーン1では、旋回ブレーキスイッチ221bが掛かり位置にある場合にオペレータがエンジンキースイッチ246のキーシリンダに差し込んだ不図示のエンジンキーを回して、エンジンキースイッチ246をOFF位置からSTART位置に切り換えるとエンジン110が始動する。すなわち、車体コントローラ30は、旋回ブレーキスイッチ221bが掛かり位置にあることが検出され、かつ、エンジンキースイッチ246がSTART位置にされたことが検出されると、エンジンコントローラ40に始動信号を出力する。エンジンコントローラ40は車体コントローラ30からの始動信号を受信するとエンジン110を始動させる。
【0021】
オペレータがエンジンキーから手を放すと、上述したように不図示のばねの付勢力によってエンジンキースイッチ246がON位置に切り換えられる。車体コントローラ30は、エンジンキースイッチ246がON位置にされたことが検出されると、エンジンコントローラ40に運転信号を出力する。エンジンコントローラ40は車体コントローラ30からの運転信号を受信するとエンジン110の運転を継続させる。
【0022】
オペレータがエンジンキーを回して、エンジンキースイッチ246をOFF位置に切り換えると、エンジン110が停止する。すなわち、車体コントローラ30は、エンジンキースイッチ246がOFF位置にされたことが検出されると、エンジンコントローラ40への運転信号の出力を停止する。エンジンコントローラ40は車体コントローラ30からの運転信号を受信できなくなるとエンジン110を停止させる。
【0023】
−−−アイドルストップ機能について−−−
本実施の形態のクレーン1では、エンジン110の運転中に、次の条件が満たされると、エンジンキースイッチ246がON位置に切り換えられたままであってもエンジン110を一時的に停止させる。具体的には、エンジン110の運転中に旋回ブレーキスイッチ221bが掛かり位置にあり、かつ、アイドルストップ機能オンオフスイッチ245がオン位置にあり、かつ、エンジン110がアイドリング中であり、かつ、右手侵入エリアおよび左手侵入エリアのいずれのエリアにもオペレータの手が侵入していない状態が所定時間(たとえば3分)以上継続すると、エンジン110の一時停止を予告する警報音がスピーカ35から発せられる。その後も上記の状態が所定時間(たとえば30秒)以上継続すると、エンジン110が一時的に停止される。
【0024】
すなわち、車体コントローラ30は、次の条件(a)〜(f)の全てが満たされている場合に、タイマを起動する。
(a) エンジンキースイッチ246がON位置(運転位置)であることが検出されている。
(b) 旋回ブレーキスイッチ221bが掛かり位置にあることが検出されている。
(c) アイドルストップ機能オンオフスイッチ245がオン位置にあることが検出されている。
(d) エンジン110の設定回転数が最低回転数(アイドリング回転数)である。
(e) 右手側検出センサ261が右手侵入エリアにオペレータの手が侵入していることを検出していない。
(f) 左手側検出センサ262が左手侵入エリアにオペレータの手が侵入していることを検出していない。
【0025】
なお、車体コントローラ30は、タイマの起動後、上記の条件(a)〜(f)のいずれかが満たされなくなるとタイマを停止させて、計時時間をリセットする。車体コントローラ30は、起動したタイマの計時時間が所定時間T1(上述したようにたとえば3分)に達すると、エンジン110の一時停止を予告する報知音を出力するための信号(予告報知信号)をスピーカ35に出力する。その後、さらに所定時間T2(上述したようにたとえば30秒)経過して、タイマの計時時間がT1+T2(たとえば3分30秒)に達すると、車体コントローラ30は、エンジンコントローラ40への運転信号の出力を停止する。したがって、エンジンコントローラ40は車体コントローラ30からの運転信号を受信できなくなるのでエンジン110を停止させる。
【0026】
たとえば、オペレータがアイドルストップ機能オンオフスイッチ245をオフ位置に切り換えると、上記条件(c)が満たされなくなるので、エンジン110は停止されず運転が継続される。具体的には、オペレータが最初からアイドルストップ機能オンオフスイッチ245をオフ位置に切り換えておいた場合や、エンジン110の一時停止を予告する報知音を聞いたオペレータがアイドルストップ機能オンオフスイッチ245をオフ位置に切り換えた場合には、エンジン110は停止されず運転が継続される。
【0027】
−−−アイドルストップ後のエンジン110の再始動について−−−
上述したアイドルストップ機能によってアイドルストップ、すなわち、エンジン110が一時的に停止された後、次の条件のうち、少なくとも1つの条件が満たされるとエンジン110が再始動されて運転が継続される。具体的には、アイドルストップ機能オンオフスイッチ245がオフ位置に切り換えられるか、旋回ブレーキスイッチ221bが外れ位置に切り換えられるか、右手侵入エリアおよび左手侵入エリアのいずれかエリアにオペレータの手が侵入したことが検出されるとエンジン110が再始動されて、運転が継続される。
【0028】
すなわち、車体コントローラ30は、次の条件(α)〜(γ)のうち、少なくとも1つの条件が満たされると、エンジンコントローラ40に始動信号を出力する。したがって、エンジンコントローラ40は車体コントローラ30からの始動信号を受信するとエンジン110を始動させる。
(α) アイドルストップ機能オンオフスイッチ245がオフ位置にあることが検出された。
(β) 旋回ブレーキスイッチ221bが外れ位置にあることが検出された。
(γ) 右手側検出センサ261で右手侵入エリアにオペレータの手が侵入したことが検出され、かつ、左手側検出センサ262で左手侵入エリアにオペレータの手が侵入したことが検出された。
【0029】
ここで、エンジン110の再始動の条件として上記条件(γ)を挙げているが、その理由は次のとおりである。すなわち、上述したように、クレーン1を運転するためには、オペレータは左右の手で同時に、各操作レバーを操作する必要がある。そのため、オペレータが左右の手で同時に各操作レバーを操作すること(操作しそうであること、または、操作しようとする意思があること)を検出した時点で、既にエンジン110が運転されていることが望ましい。そこで、本実施の形態では、オペレータがクレーン1の運転を再開する直前にエンジン110を再始動できるように、上記条件(γ)を挙げている。
【0030】
なお、エンジンコントローラ40は、車体コントローラ30からの始動信号を受信してエンジン110を始動させ、エンジン110が再始動したことを検出すると、エンジン110が再始動したことを示す信号(再始動完了信号)を車体コントローラ30に出力する。車体コントローラ30は、上記の条件(α)〜(γ)のうち、少なくとも1つの条件が満たされて、エンジンコントローラ40に始動信号を出力した後、エンジンコントローラ40からの再始動完了信号を受信すると、エンジンコントローラ40に運転信号を出力する。したがって、エンジンコントローラ40は車体コントローラ30からの運転信号を受信するとエンジン110の運転を継続させる。
【0031】
−−−フローチャート−−−
図8は、上述したアイドルストップ機能のうち、エンジン110の一時停止処理の動作について説明するフローチャートである。クレーン1のエンジン110の運転が開始されると、図8に示す処理を行うプログラムが起動されて車体コントローラ30で実行される。ステップS1において、上述した条件(a)〜(f)の全てが満たされるまで待機する。ステップS1が肯定判断されるとステップS3へ進み、タイマを起動してステップS5へ進む。
【0032】
ステップS5において、上述した条件(a)〜(f)の全てが満たされているか否かを判断する。ステップS5が肯定判断されるとステップS7へ進み、ステップS3で起動したタイマの計時時間が上述した所定時間T1に到達したか否かを判断する。ステップS7が否定判断されるとステップS5へ戻る。ステップS7が肯定判断されるとステップS9へ進み、予告報知信号をスピーカ35に出力してステップS11へ進む。ステップS11において、上述した条件(a)〜(f)の全てが満たされているか否かを判断する。ステップS11が肯定判断されるとステップS13へ進み、ステップS3で起動したタイマの計時時間が上述した所定時間T1+T2に到達したか否かを判断する。ステップS13が否定判断されるとステップS11へ戻る。ステップS13が肯定判断されるとステップS15へ進み、エンジンコントローラ40への運転信号の出力を停止して本プログラムを終了する。
【0033】
ステップS5が否定判断されるとステップS17へ進み、ステップS3で起動したタイマを停止させ、当該タイマをリセットしてステップS1へ戻る。ステップS11が否定判断されるとステップS17へ進む。
【0034】
図9は、上述したアイドルストップ機能のうち、エンジン110の一時停止後の再始動処理の動作について説明するフローチャートである。図8で説明した処理の動作によってクレーン1のエンジン110が一時停止されると、図9に示す処理を行うプログラムが起動されて車体コントローラ30で実行される。ステップS31において、上述した条件(α)〜(γ)のうち、少なくとも1つの条件が満たされるまで待機する。ステップS31が肯定判断されるとステップS33へ進み、エンジンコントローラ40への始動信号の出力を開始してステップS35へ進む。
【0035】
ステップS35において、エンジンコントローラ40からの再始動完了信号を受信するまで待機する。ステップS35が肯定判断されるとステップS37へ進み、エンジンコントローラ40への始動信号の出力を停止し、運転信号の出力を開始して本プログラムを終了する。
【0036】
上述した実施の形態のクレーン1では、次の作用効果を奏する。
(1) アイドルストップ機能によりエンジン110の運転を一時停止させた後、右手側検出センサ261で右手侵入エリアにオペレータの手が侵入したことが検出され、かつ、左手側検出センサ262で左手侵入エリアにオペレータの手が侵入したことが検出されると、エンジン110を再始動させるように構成した。これにより、アイドルストップ機能によりエンジン110の運転を一時停止させた後、再びエンジン110を始動させるために特別な操作が必要ないので、作業効率が向上する。
【0037】
(2) 本実施の形態では、上述したように、エンジン110を再始動の条件として、右手側検出センサ261で右手侵入エリアにオペレータの手が侵入したことが検出され、かつ、左手側検出センサ262で左手侵入エリアにオペレータの手が侵入したことが検出されることとした。また、上述したように、クレーン1を運転するためには、オペレータは左右の手で同時に、各操作レバーを操作することとなる。したがって、アイドルストップ機能によりエンジン110の運転が一時的に停止された後、オペレータがクレーン1の運転を再開する直前にエンジン110を再始動できるので、再びエンジン110を始動させるための条件が適切なものとなる。すなわち、オペレータがクレーン1の操作をする意思がなく、偶然に右手侵入エリアおよび左手侵入エリアのいずれか一方のエリアにのみオペレータの手が侵入したとしても、エンジン110が再始動しないので、不必要なエンジン110の再始動を抑制でき、燃料消費量を抑制できる。
【0038】
(3) 右手侵入エリアおよび左手侵入エリアへオペレータの手が侵入したことを検出するセンサとして非接触センサを採用したので、操作レバーから離れた位置にセンサを配設できる。したがって、操作レバーの周囲の改造等の必要性が少なくなり、設計が容易でコスト増を抑制できる。
【0039】
(4) 右手側検出センサ261および左手側検出センサ262として光学式の変位センサや光電スイッチなどを用いるように構成したので、右手侵入エリアおよび左手侵入エリアへオペレータの手が侵入したことを簡単な構成で検出できるので、コスト増を抑制できる。
【0040】
−−−変形例−−−
(1) 上述の説明では、右手側検出センサ261および左手側検出センサ262として、たとえば、光学式の変位センサや光電スイッチなどの非接触センサを用いているが、本発明はこれに限定されない。たとえば、運転室109のたとえば上部にカメラを配設し、当該カメラで撮像して得られる画像に対して画像処理を行うことで、右手侵入エリアや左手侵入エリアにオペレータの手が侵入しているか否かの判断を行うように構成してもよい。
【0041】
(2) 上述の説明では、エンジン110の再始動条件(γ)として、右手侵入エリアや左手侵入エリアにオペレータの手が侵入したことを非接触センサによって検出しているが、本発明はこれに限定されない。たとえば、非接触センサに代えて、各レバーに感圧スイッチを設け、感圧スイッチのオンオフ状態に基づいて、レバーに手が触れているか否かを検出するようにしてもよい。そして、当該感圧スイッチによって右側レバー群210のいずれかの操作レバーに手が触れていることが検出され、かつ、旋回レバー221に手が触れていることが検出されたときに、エンジン110を再始動するように構成してもよい。また、感圧センサに代えて、たとえば、オペレータの手が触れたことによる静電容量の変化を検出するセンサなど、他の種類の接触式のセンサを用いてもよい。
【0042】
(3) 本発明は、上述した移動式クレーンに限らず、油圧ショベルやアースドリルなど、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーとを備え、作業時にはオペレータが左右の手で右側操作レバーと左側操作とを同時に操作することとなる各種の作業機械に適用できる。
(4) 上述した各実施の形態および変形例は、それぞれ組み合わせてもよい。
【0043】
なお、本発明は、上述した実施の形態のものに何ら限定されず、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーと、右側操作レバーを操作する際にオペレータの右手が侵入する右手侵入エリアにオペレータの右手が侵入したことを検出する右手侵入検出手段と、左側操作レバーを操作する際にオペレータの左手が侵入する左手侵入エリアにオペレータの左手が侵入したことを検出する左手侵入検出手段と、アイドリング停止手段がエンジンのアイドリングを停止させた後、右手侵入検出手段でオペレータの右手が右手侵入エリアに侵入したことを検出し、かつ、左手侵入検出手段でオペレータの左手が左手侵入エリアに侵入したことを検出すると、エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする各種構造の作業機械を含むものである。
また、本発明は、上述した実施の形態のものに何ら限定されず、所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、オペレータが右手で操作する右側操作レバーと、オペレータが左手で操作する左側操作レバーと、右側操作レバーにオペレータの手が触れたことを検出する右側接触検出手段と、左側操作レバーにオペレータの手が触れたことを検出する左側接触検出手段と、アイドリング停止手段がエンジンのアイドリングを停止させた後、右側接触検出手段でオペレータの手が右側操作レバーに触れたことを検出し、かつ、左側接触検出手段でオペレータの手が左側操作レバーに触れたことを検出すると、エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする各種構造の作業機械を含むものである。
【符号の説明】
【0044】
1 移動式クレーン(クローラクレーン、クレーン)、30 車体コントローラ、40 エンジンコントローラ、110 エンジン、210 右側レバー群、211,212 走行レバー、213 フロントドラムレバー、214 リヤドラムレバー、215 ブーム起伏ドラムレバー、221 左側レバー(旋回レバー)、245 アイドルストップ機能オンオフスイッチ、261 右手側検出センサ、262 左手側検出センサ
【特許請求の範囲】
【請求項1】
所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、
オペレータが右手で操作する右側操作レバーと、
オペレータが左手で操作する左側操作レバーと、
前記右側操作レバーを操作する際にオペレータの右手が侵入する右手侵入エリアにオペレータの右手が侵入したことを検出する右手侵入検出手段と、
前記左側操作レバーを操作する際にオペレータの左手が侵入する左手侵入エリアにオペレータの左手が侵入したことを検出する左手侵入検出手段と、
前記アイドリング停止手段が前記エンジンのアイドリングを停止させた後、前記右手侵入検出手段でオペレータの右手が前記右手侵入エリアに侵入したことを検出し、かつ、前記左手侵入検出手段でオペレータの左手が前記左手侵入エリアに侵入したことを検出すると、前記エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする作業機械。
【請求項2】
請求項1に記載の作業機械において、
前記右手侵入検出手段および前記左手侵入検出手段は、それぞれ非接触式のセンサであることを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記非接触式のセンサは、光学式の変位センサ、超音波式の変位センサ、または光電スイッチのいずれかであることを特徴とする作業機械。
【請求項4】
所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、
オペレータが右手で操作する右側操作レバーと、
オペレータが左手で操作する左側操作レバーと、
前記右側操作レバーにオペレータの手が触れたことを検出する右側接触検出手段と、
前記左側操作レバーにオペレータの手が触れたことを検出する左側接触検出手段と、
前記アイドリング停止手段が前記エンジンのアイドリングを停止させた後、前記右側接触検出手段でオペレータの手が前記右側操作レバーに触れたことを検出し、かつ、前記左側接触検出手段でオペレータの手が前記左側操作レバーに触れたことを検出すると、前記エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする作業機械。
【請求項5】
請求項4に記載の作業機械において、
前記右側接触検出手段および前記左側接触検出手段は、それぞれ前記右側操作レバーおよび前記左側操作レバーに触れるオペレータの手の接触圧力を検出する感圧スイッチであることを特徴とする作業機械。
【請求項1】
所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、
オペレータが右手で操作する右側操作レバーと、
オペレータが左手で操作する左側操作レバーと、
前記右側操作レバーを操作する際にオペレータの右手が侵入する右手侵入エリアにオペレータの右手が侵入したことを検出する右手侵入検出手段と、
前記左側操作レバーを操作する際にオペレータの左手が侵入する左手侵入エリアにオペレータの左手が侵入したことを検出する左手侵入検出手段と、
前記アイドリング停止手段が前記エンジンのアイドリングを停止させた後、前記右手侵入検出手段でオペレータの右手が前記右手侵入エリアに侵入したことを検出し、かつ、前記左手侵入検出手段でオペレータの左手が前記左手侵入エリアに侵入したことを検出すると、前記エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする作業機械。
【請求項2】
請求項1に記載の作業機械において、
前記右手侵入検出手段および前記左手侵入検出手段は、それぞれ非接触式のセンサであることを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記非接触式のセンサは、光学式の変位センサ、超音波式の変位センサ、または光電スイッチのいずれかであることを特徴とする作業機械。
【請求項4】
所定の条件を満たすと作業機械のエンジンのアイドリングを停止させるアイドリング停止手段と、
オペレータが右手で操作する右側操作レバーと、
オペレータが左手で操作する左側操作レバーと、
前記右側操作レバーにオペレータの手が触れたことを検出する右側接触検出手段と、
前記左側操作レバーにオペレータの手が触れたことを検出する左側接触検出手段と、
前記アイドリング停止手段が前記エンジンのアイドリングを停止させた後、前記右側接触検出手段でオペレータの手が前記右側操作レバーに触れたことを検出し、かつ、前記左側接触検出手段でオペレータの手が前記左側操作レバーに触れたことを検出すると、前記エンジンを再始動させるエンジン再始動手段とを備えることを特徴とする作業機械。
【請求項5】
請求項4に記載の作業機械において、
前記右側接触検出手段および前記左側接触検出手段は、それぞれ前記右側操作レバーおよび前記左側操作レバーに触れるオペレータの手の接触圧力を検出する感圧スイッチであることを特徴とする作業機械。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−76381(P2013−76381A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−217243(P2011−217243)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(503032946)日立住友重機械建機クレーン株式会社 (104)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(503032946)日立住友重機械建機クレーン株式会社 (104)
【Fターム(参考)】
[ Back to top ]