
作業用車両

【課題】架装物への昇降性とリヤコンビランプの視認性とを両立することができる作業用車両を提供する。
【解決手段】車台2にはブーム5によって昇降するバケット7が架装される。バケット7までの昇降経路は、車両の後方から前方に向かって一直線に配列された、ステップ19、アウターボックス10aの上面のスペースS2、車台2上のスペースS1、工具箱13の上面13a、工具箱14の上面14a、工具箱15の上面15aがそれぞれ踏み面として機能することによって形成される。車両の走行中においては、リヤコンビランプ17Lが、スペースS2の上方すなわち昇降経路上に位置しているが、作業者が作業床へ昇降する際には、リヤコンビランプ17Lが昇降経路上から退避する。これにより、走行中におけるリヤコンビランプの視認性を確保するとともに、作業中における作業者の昇降の安全性と容易性とを両立することができる。
【解決手段】車台2にはブーム5によって昇降するバケット7が架装される。バケット7までの昇降経路は、車両の後方から前方に向かって一直線に配列された、ステップ19、アウターボックス10aの上面のスペースS2、車台2上のスペースS1、工具箱13の上面13a、工具箱14の上面14a、工具箱15の上面15aがそれぞれ踏み面として機能することによって形成される。車両の走行中においては、リヤコンビランプ17Lが、スペースS2の上方すなわち昇降経路上に位置しているが、作業者が作業床へ昇降する際には、リヤコンビランプ17Lが昇降経路上から退避する。これにより、走行中におけるリヤコンビランプの視認性を確保するとともに、作業中における作業者の昇降の安全性と容易性とを両立することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷台や荷室あるいは昇降装置等の機械装置といった架装物が車台に架装された作業用車両に関する。
【背景技術】
【0002】
作業用車両として、荷台や荷室が車台に架装された運搬車や、クレーン装置、ミキサー装置、昇降装置等の種々の機械装置が車台に架装された特装車が知られている。こうした作業用車両においては、作業を行うにあたって作業者の架装物への昇降が要求される場合がある。特に、昇降装置を備えた高所作業車においては、作業者が車両に設けられた作業床に乗り込むことが前提となる。
そこで、従来の作業用車両として、特許文献1に示されるものが知られている。この作業用車両においては、架装物を昇降するためのステップが、車台上において比較的スペースを確保しやすい車両後方に配置され、作業者が架装物に安全かつ容易に昇降できるようにしている。
【0003】
また、上記した各種の作業用車両は、当然のことながら公道等を自走することが前提となる。したがって、車両の後方には、車両の存在を知らせるテールランプや、車両の走行状態等を知らせるブレーキランプ、方向指示器、あるいはこれらを一体化したコンビネーションランプからなる後方灯火手段が設けられている。このとき、作業用車両には種々の架装物が架装されているため、こうした架装物に干渉せず、しかも架装物によって視認性が低下しないように、後方灯火手段を配置しなければならない。
上記特許文献1に示される作業用車両においては、後方灯火手段(コンビネーションランプ35)を車両の後端よりも前方寄りであって、かつ、架装物の上部に配置することにより、架装物との干渉を避けながらも、架装物によって視認性が低下しないようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−240400
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に示される作業用車両においては、後方灯火手段が車両の後端や架装物よりも前方に配置されている。そのため、車両後方の所定の位置(例えば、車両の左後方や右後方の低い位置)からは、どうしても架装物によって視界が遮られてしまい、後方灯火手段の視認性が低下してしまう。
そこで、後方灯火手段を、高さを維持したまま車両の後方に移動して、ステップの上方に配置することが考えられる。しかしながら、ステップの上方に後方灯火手段が位置することとなれば、架装物と干渉するおそれがあり、さらには、作業者が架装物を昇降する過程において、後方灯火手段が障害物となってしまい、安全かつ容易な昇降ができなくなってしまう。
また、車台に架装される架装物の形状や配置はさまざまであり、後方灯火手段が最適な視認性を確保できる位置は車両ごとに異なる。そのため、上記の作業用車両においては、架装物の形状や配置が変更された場合に、必ずしも視認性が確保されるとは限らない。
以上のように、従来の作業用車両においては、架装物への昇降性と後方灯火手段の視認性とを両立したものではなく、しかも汎用性に乏しいという問題があった。
【0006】
本発明は、架装物の形状や配置に関わりなく、架装物への昇降性と後方灯火手段の視認性とを両立することができる作業用車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、架装物が架装された車台に、該車台の後方から視認可能な後方灯火手段が設けられ、前記架装物または車台の一部、もしくは、前記架装物または車台に取り付けられた専用部材によって形成される複数段の踏み面を有する昇降経路を備えた作業用車両を前提とする。
本発明において、架装物とは、荷台や荷室、種々の機械装置を広く含むものであり、特に機械装置を架装物とした場合に、その構成や用途等は限定されるものではない。したがって、本発明の作業用車両には、荷物、重機、車両等を運搬するための運搬車、高所作業車やクレーン車等の建設作業車はもちろんのこと、ミキサー車やゴミ収集車等のその他の車両も含まれる。いずれにしても、本発明の作業用車両には、車台に何らかの目的を有する架装物が架装されたものが広く含まれる。
本発明の後方灯火手段は、車台すなわち車両の後方から灯火状態を視認することができるものを広く含むものである。本発明の後方灯火手段としては、例えば、夜間等に車両の存在を後方に知らせるためのテールランプや、車両の走行状態等を後方に報知するブレーキランプや方向指示器、あるいはこれらが一体化されたコンビネーションランプ等が考えられる。
本発明において、昇降経路は、梯子等の専用部材によって構成されるものであってもよいし、架装物や車台の一部によって構成されるものであってもよく、さらには、架装物や車台の一部と、梯子等の専用部材との双方によって構成されるものでもよい。いずれにしても、本発明の昇降経路は、架装物に昇降するための踏み面として機能するものを有するものであって、車両が接地する接地面(路面)からの高さを異にする複数段の踏み面を備えていれば、各踏み面が階段状に配置されていてもよいし、梯子状に垂直方向に配置されていてもよい。
【0008】
上記の構成を前提として、請求項1に記載の発明は、前記後方灯火手段が、前記昇降経路上であって前記車台の後方から視認可能な通常位置と、該通常位置よりも後方灯火手段の一部または全部が前記昇降経路上から退避する退避位置との間を移動可能に設けられたことを特徴とする。
請求項1に記載の発明によれば、後方灯火手段は、通常位置において昇降経路上に位置する。昇降経路上というのは、架装物を昇降する際に足元や頭上等において昇降者の妨げとなる範囲を広く含むものであり、例えば、連続する2つの踏み面を結ぶ線分の上方が該当する。また、退避位置というのは、通常位置に比べて上記の昇降経路上から後方灯火手段の一部または全部が退避した位置をいうものであり、通常位置にあるときに比べて、後方灯火手段による昇降者の妨げが小さくなる位置をいう。
また、請求項1に記載の発明において、後方灯火手段は、通常位置と退避位置との間を移動可能であればよく、何らかの駆動装置によって両位置を機械的に移動するものであってもよいし、手動で移動させるものであってもよい。また、通常位置および退避位置の配置や、これら両位置を移動する態様も特に限定されることはなく、車両の幅方向や前後方向にスライドするものであってもよいし、あるいは回転するようにして両位置を移動するものであってもよい。
【0009】
請求項2に記載の発明は、前記車台には作業床を昇降させる昇降装置が架装されたことを特徴とする。
昇降装置には、例えば旋回台やブーム、あるいはこれらを旋回させたり伸縮させたりするための動力源や操作手段等が広く含まれるが、少なくとも作業床を昇降させるものであれば、旋回機能は必ずしも必須ではなく、ブームの起伏機能または伸縮機能のいずれかのみを有するものであってもよい。
【0010】
請求項3に記載の発明は、車両が走行状態または走行可能状態にあることを検出する走行可否検出手段と、前記後方灯火手段の位置を検出する位置検出手段と、前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出され、かつ、前記位置検出手段によって前記後方灯火手段が通常位置にないことが検出されたとき、前記後方灯火手段が通常位置にないことを報知する報知手段と、を備えたことを特徴とする。
請求項3に記載の発明において、走行可否検出手段は、車両が走行状態または走行可能状態にあることを検出するものであれば、その具体的な構成や検出方法等は特に限定されない。例えば、車両が走行状態にあることを検出する方法としては、走行用の操作手段(シフトレバー等)の操作状態や速度計等が考えられる。このとき、走行可否検出手段は、走行状態または走行可能状態にあることを検出するものであればよいので、例えば、走行状態または走行可能状態であることを検出する構成としてもよいし、これとは逆に、停止状態または走行不可能状態であることを検出する構成としてもよい。走行可否検出手段が、停止状態または走行不可能状態であることを検出する構成とした場合には、当該走行可否検出手段が検出信号を発しないことをもって、車両の走行状態または走行可能状態と判断すればよい。
【0011】
請求項3に記載の発明において、位置検出手段は、後方灯火手段の位置を検出するものであれば、その具体的な構成や検出方法等は特に限定されない。例えば、位置検出手段としては、圧力センサ、光センサ、磁気センサ等が考えられる。また、位置検出手段は、後方灯火手段が少なくとも通常位置にないことを検出するものであればよい。例えば、位置検出手段は、後方灯火手段が退避位置にあることを検出するものとしてもよく、この場合には、退避位置にあることの検出信号をもって、後方灯火手段が通常位置にないと判断することができる。
請求項3に記載の発明において、報知手段の構成や報知の方法は特に限定されない。例えば、報知手段を照明装置とした場合には、所定の態様で照明装置を点灯または点滅させることで報知を行うようにしてもよいし、報知手段を音声出力装置とした場合には、所定の音声を出力することで報知を行うようにしてもよい。また、報知手段を表示装置として、後方灯火手段が通常位置にないことをメッセージとして表示するようにしても構わない。
【0012】
請求項4に記載の発明は、車両が走行状態または走行可能状態にあるか否かを検出する走行可否検出手段と、前記後方灯火手段の前記通常位置から退避位置への移動を規制するための退避規制装置を制御する退避規制手段と、を備え、前記退避規制手段は、前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されている場合には、前記後方灯火手段の移動を規制するとともに、車両の走行状態または走行可能状態であることが検出されていない場合には、前記後方灯火手段の移動を許容するように前記退避規制装置を制御することを特徴とする。
請求項4に記載の発明において、走行可否検出手段は、上記請求項3に記載の発明と同様に、車両が走行状態または走行可能状態にあることを検出するものであれば、その具体的な構成や検出方法等は特に限定されない。
請求項4に記載の発明において、退避規制手段は、後方灯火手段の通常位置から退避位置への移動を規制したり許容したりするものでればよく、その具体的な構成は特に限定されない。
【0013】
請求項5に記載の発明は、車両が走行状態または走行可能状態にあるか否かを検出する走行可否検出手段と、前記後方灯火手段に対して、少なくとも前記退避位置から通常位置へ復帰させる駆動力を付与するための駆動装置を制御する駆動制御手段と、を備え、前記駆動制御手段は、前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されたとき、前記駆動装置を駆動して前記後方灯火手段を通常位置へ復帰させることを特徴とする。
請求項5に記載の発明において、走行可否検出手段は、上記請求項3または4に記載の発明と同様に、車両が走行状態または走行可能状態にあることを検出するものであれば、その具体的な構成や検出方法等は特に限定されない。
請求項5に記載の発明における駆動装置としては、例えば油圧モータ、電気モータ、ソレノイド、スプリング等の付勢手段、さらにはこれらの組み合わせ等が考えられる。例えば、後方灯火手段を通常位置に位置させるように、スプリングの付勢力を常時作用させておく。また、車両の走行状態または走行可能状態であることが検出されていないときには、所定のロック部材によって、後方灯火部材が退避位置に位置するようにロックしておく。そして、走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されたときに、ロック部材のロックを解除することで、後方灯火手段がスプリングの付勢力によって通常位置に移動するようにしてもよい。この場合には、ロック部材を作動する装置やスプリング等が駆動装置となり、当該駆動装置を制御するためにコントローラによって実行される処理が駆動制御手段となる。
【0014】
請求項6に記載の発明は、アウトリガ操作手段による張り出し操作に基づいて前記車台の幅方向に張り出したアウトリガフロートを接地面に接地させ、前記アウトリガ操作手段による格納操作に基づいて前記アウトリガフロートの接地を解除するアウトリガジャッキ装置を備え、前記駆動制御手段は、前記アウトリガ操作手段による格納操作に基づいて、前記駆動装置を駆動して前記後方灯火手段を通常位置へ復帰させることを特徴とする。
請求項7に記載の発明は、前記駆動装置が、前記後方灯火手段を前記通常位置から退避位置へ移動させる駆動力を付与するとともに、前記駆動制御手段は、前記アウトリガ操作手段による張り出し操作に基づいて、前記駆動装置を駆動して前記後方灯火手段を退避位置へ移動させることを特徴とする。
【発明の効果】
【0015】
請求項1〜7に記載の発明によれば、後方灯火手段を通常位置に位置させることにより後方からの視認性が確保されるとともに、作業者が架装物等を昇降する場合には、後方灯火手段を退避位置に退避させることにより昇降経路を確保することができる。したがって、車両の走行中等における後方灯火手段の視認性の確保と、作業中等における安全かつ容易な昇降といった昇降性の確保とを両立することができる。
また、架装物の形状や配置等が変更された場合であっても、まず昇降経路を確保するとともに、当該昇降経路上において視認性が確保できる位置に後方灯火手段を配置することができるので、設計変更等に関わらず視認性と昇降性とを容易に確保することができる。
【0016】
特に請求項2に記載の発明によれば、作業者は高頻度で車台を昇降するため、昇降性の向上によって、作業効率と安全面との一層の向上がもたらされる。
特に請求項3に記載の発明によれば、車両を走行しようとしたときや車両の走行中において、後方灯火手段が通常位置にない場合に報知手段による報知が行われるので、後方灯火手段を視認しにくい状態で走行してしまうのを防ぐことができ、走行中における後方灯火手段の視認性を常に確保することができる。
特に請求項4に記載の発明によれば、車両の走行中に、後方灯火手段が視認しにくい状態に移動してしまうのを防ぐことができ、走行中における後方灯火手段の視認性を常に確保することができる。
特に請求項5に記載の発明によれば、車両を走行しようとしたときや車両の走行中において、後方灯火手段が通常位置に強制的に復帰するので、後方灯火手段を視認しにくい状態で走行してしまうのを防ぐことができ、走行中における後方灯火手段の視認性を常に確保することができる。
特に請求項6に記載の発明によれば、アウトリガ操作手段による格納操作に基づいて、後方灯火手段を通常位置へ復帰させるので、作業の終了とともに後方灯火手段が通常位置へ復帰することとなり、後方灯火手段を視認しにくい状態で走行してしまうのを防ぐことができ、走行中における後方灯火手段の視認性を常に確保することができる。
特に請求項7に記載の発明によれば、アウトリガ操作手段による張り出し操作に基づいて、後方灯火手段を退避位置へ移動させるので、車両が安定支持される状態になってから作業者を架装物に昇らせることができる。言い換えれば、車両が安定支持されない状態では、昇降経路上に後方灯火手段を位置させて作業者の昇降を妨げることができ、これによって作業者が架装物に昇る際の安全を確保することができる。
【図面の簡単な説明】
【0017】
【図1】第1実施形態の高所作業車を斜め後方から見た斜視図である。
【図2】図1の部分拡大図である。
【図3】リヤコンビランプの位置関係を説明する図である。
【図4】走行状態または走行可能状態にある高所作業車の後方部分拡大図であり、(a)は上面図、(b)は左側側面図、(c)は背面図である。
【図5】停止状態または作業状態にある高所作業車の後方部分拡大図であり、(a)は上面図、(b)は左側側面図、(c)は背面図である。
【図6】コントローラと各種装置との接続関係を説明するブロック図である。
【図7】第1実施形態における報知装置制御処理を示すフローチャートである。
【図8】第2実施形態における報知装置制御処理を示すフローチャートである。
【図9】第3実施形態における報知装置制御処理を示すフローチャートである。
【図10】第4実施形態における報知装置制御処理を示すフローチャートである。
【図11】第5実施形態における規制装置制御処理であって、リヤコンビランプをロックする際の処理を示すフローチャートである。
【図12】第5実施形態における規制装置制御処理であって、リヤコンビランプのロックを解除する際の処理を示すフローチャートである。
【図13】第6実施形態における規制装置制御処理であって、リヤコンビランプのロックを解除する際の処理を示すフローチャートである。
【図14】第7実施形態における駆動装置制御処理を示すフローチャートである。
【図15】第8実施形態における駆動装置制御処理を示すフローチャートである。
【図16】第9実施形態における駆動装置制御処理を示すフローチャートである。
【発明を実施するための形態】
【0018】
図1〜図7を用いて、本発明の第1実施形態について説明する。なお、本発明は、車台に架装物が架装された作業用車両に広く適用可能であるが、ここでは本発明を高所作業車に適用した場合について説明する。
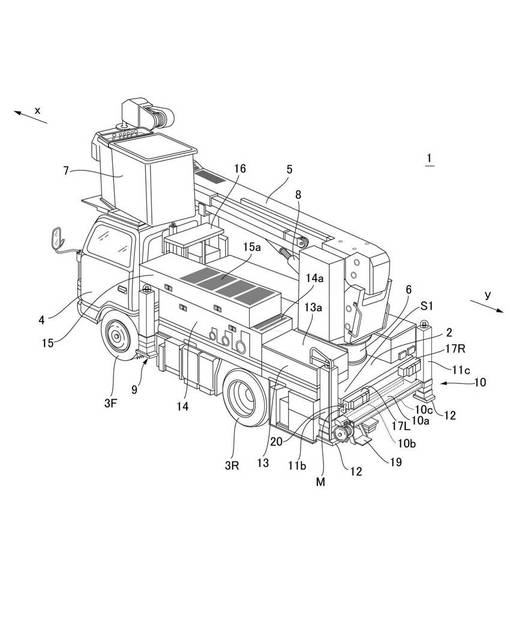
図1は、第1実施形態の高所作業車を斜め後方から見た斜視図である。高所作業車1は、車台2(ボディ)に前輪3F,3Fおよび後輪3R,3Rを有しており、前輪3F,3Fの上方には、高所作業車1の走行操作および作業操作を行うためのキャブ4が設けられている。このキャブ4の後方には、主に以下の架装物が架装されている。
すなわち、車台2の後端近傍には、不図示の油圧ポンプから吐出される作動油によってブーム5を旋回させる旋回装置6が設けられている。ブーム5は多段式に構成されており、その先端(トップブーム)には、本発明の作業床であるバケット7が常に水平を維持するように回動自在に取り付けられている。また、ブーム5には起伏シリンダ8が接続されており、この起伏シリンダ8を伸縮させることで、ブーム5が起伏するようにしている。つまり、バケット7は、ブーム5の伸縮と起伏シリンダ8の伸縮とによって高さ方向の位置を調節することができ、また、旋回装置6によって水平方向の位置を調節することができる。
なお、ブーム5、起伏シリンダ8およびこれらに作動油を供給する油圧ポンプによって本発明の昇降装置を構成している。
【0019】
また、車台2には、アウトリガジャッキ装置9,10が架装されている。アウトリガジャッキ装置9はキャブ4および前輪3F,3Fの近傍に設けられ、アウトリガジャッキ装置10は車台2の後端に設けられている。アウトリガジャッキ装置9,10は、いずれも同一の構成であるため、ここではアウトリガジャッキ装置10について説明する。
アウトリガジャッキ装置10は、一対のインナーボックス10b,10cが格納されたアウターボックス10aを、車台2の幅方向に沿って延設させている。インナーボックス10b,10cは、車台2の前後方向にずらして並列に配置されており、インナーボックス10bは車台2の前方側(高所作業車1の前進方向x側)に、インナーボックス10cは車台2の後方側(高所作業車1の後進方向y側)に配置されている。これら両インナーボックス10b,10cには、不図示のスライドシリンダがそれぞれ接続されており、このスライドシリンダの伸長動作によって、インナーボックス10bは車台2の左側(高所作業車1の前進方向xに向かって左側)に張り出し、インナーボックス10cは車台2の右側(高所作業車1の前進方向xに向かって右側)に張り出すこととなる。
そして、インナーボックス10b,10cの先端には、鉛垂方向(接地面に対して垂直方向)に伸縮自在なアウトリガ11b,11cがそれぞれ固定されている。アウトリガ11b,11cの下端には、それぞれアウトリガフロート12が設けられており、不図示のジャッキシリンダによってアウトリガ11b,11cを伸長させることにより、アウトリガフロート12が接地面に圧接して車両を安定支持することができる。
【0020】
また、車台2上には、作業用の工具等を収納するための工具箱13〜15が、車台2の長手方向に沿って配列されている。工具箱13は、車台2の後端から、図中符号S1で示すスペース分の間隔をもって配置されており、この工具箱13の前方(高所作業車1の前進方向x)に隣接するようにして工具箱14が配置されている。この工具箱14は、工具箱13よりも高さ方向に長く形成されており、工具箱13,14の間に段差が生じるようにしている。また、工具箱15は、工具箱14の上面14a上に固定されているが、このとき、工具箱14の上面14aが露出するように、工具箱15を工具箱14の後端から前方にずらして配置している。
したがって、車台2の後端から前方に向かって、スペースS1、工具箱13の上面13a、工具箱14の上面14a、工具箱15の上面15a、工具箱15に隣接するステップ16の順に階段状に高くなっていくこととなるが、このような構成としたのは、作業者がバケット7に乗り込むための昇降経路を確保するためである。つまり、図示のとおり、作業者が乗り込むバケット7は、格納状態においてキャブ4の上方に位置しているので、このバケット7に作業者が乗り込むためには昇降経路が必要となる。第1実施形態のように、工具箱13〜15によって昇降経路を階段状に設けることにより、車台2上からバケット7までの昇降を容易かつ安全なものとすることができる。
【0021】
また、通常、高所作業車1のような作業用車両においては、車台2に架装される架装物の重量に耐えられるように、車輪3F、3Rの直径を大きくしているため、接地面と車台2との間を昇降する際にも、上記と同様に昇降経路が必要となる。第1実施形態においては、接地面から車台2上までの昇降経路を、工具箱13の後方に設けることにより、接地面から工具箱15の上面15aまで一直線に昇降経路を形成し、接地面とバケット7との間を昇降する作業者の動線を短くして、昇降性を向上するようにしている。
なお、車台2の後端には、高所作業車1の後方から視認可能なように、ブレーキランプ、バックランプ、方向指示器を一体化したリヤコンビランプ17L,17R(リヤコンビネーションランプ)が設けられているが、第1実施形態においては、接地面から車台2上までの間の昇降を安全かつ容易に行えるように、リヤコンビランプ17Lを次のような構成にしている。
【0022】
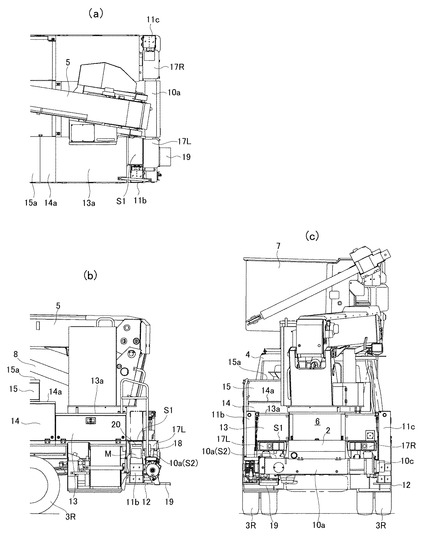
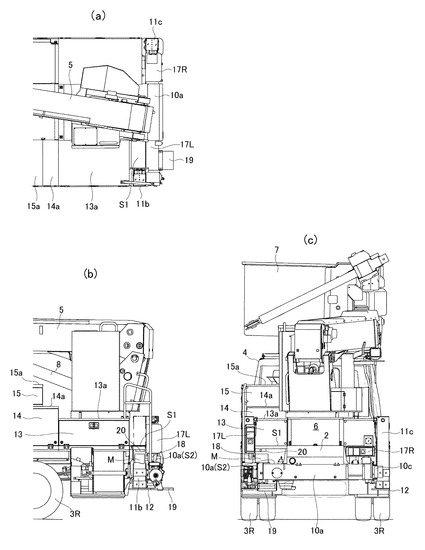
図2は、高所作業車1の左側後端を部分的に拡大した斜視図であり、図3は、リヤコンビランプ17Lの位置関係を説明するための図である。また、図4は、走行状態または走行可能状態における高所作業車1の後方部分拡大図であり、図4(a)は高所作業車1の上面図、図4(b)は高所作業車1の左側側面図、図4(c)は高所作業車1を後方から見た背面図である。
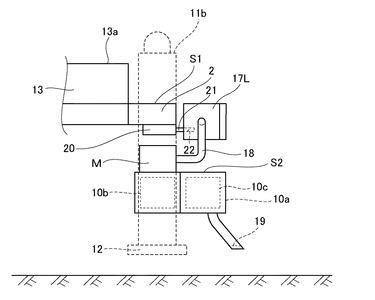
図2、図3に示すように、アウトリガ11bは、車台2に形成されたスペースS1に隣接して設けられており、このスペースS1の真下すなわち車台2とアウターボックス10aとの間の空間には、ステッピングモータからなる駆動モータMが設けられている。この駆動モータMの回転動力は、不図示の減速機を介して駆動モータMの出力軸に接続されたモータ回転軸18によって取り出される。このモータ回転軸18は、高所作業車1の後進方向yに突出した後、上方に90度屈曲してから、さらに車台2の幅方向に90度屈曲しており、その先端にリヤコンビランプ17Lが固定されている。そして、高所作業車1の走行状態または走行可能状態においては、図示のとおり、リヤコンビランプ17Lが車台2や接地面と水平を維持した通常位置に静止している。この通常位置においては、リヤコンビランプ17Lが、アウトリガ11bよりも、高所作業車1の後進方向y側に突出している。したがって、リヤコンビランプ17Lは、高所作業車1の後方のいずれの角度からも良好な視認性が確保されることとなる。
なお、リヤコンビランプ17Lは、その通常位置において、アウターボックス10aの上方にあり、車台2の後端面に臨んでいる。
【0023】
そして、アウターボックス10aの下方には、当該アウターボックス10aの後端面よりもさらに高所作業車1の後進方向y側に突出するステップ19が設けられており、図3に示すように、ステップ19から車台2のスペースS1まで、階段状に本発明の昇降経路が形成されている。
より具体的には、ステップ19、アウターボックス10aの上面であってリヤコンビランプ17Lの下面に臨むスペースS2、車台2の後端近傍のスペースS1が、接地面と車台2との間を昇降する際の踏み面として機能することにより昇降経路が形成される。
しかしながら、図2〜図4に示すように、高所作業車1の走行状態または走行可能状態においては、リヤコンビランプ17LがスペースS2の上方に位置しており、昇降性が悪くなるばかりか、昇降の際にリヤコンビランプ17Lを破損させてしまう恐れがある。そこで、第1実施形態においては、作業者が接地面と車台2上との間を昇降する際に、駆動モータMを駆動してリヤコンビランプ17Lを昇降経路から退避させることで、安全かつ容易な昇降が可能となるようにしている。リヤコンビランプ17Lが昇降経路から退避した状態を図5に示す。
【0024】
図5は、図4と同様に高所作業車1の後方部分拡大図であり、図5(a)は高所作業車1の上面図、図5(b)は高所作業車1の左側側面図、図5(c)は高所作業車1を後方から見た背面図である。
この図からも明らかなように、駆動モータMを駆動すると、リヤコンビランプ17Lは図4に示す通常位置から図5に示す退避位置まで回転して静止する。この退避位置においては、リヤコンビランプ17Lは、格納状態にあるアウトリガ11bの後方に起立した状態となり、通常位置にあるリヤコンビランプ17Lによって被覆されていたアウターボックス10aの上面のスペースS2が露出する。したがって、このスペースS2が踏み面として機能するとともに、ステップ19、スペースS2、スペースS1によって、緩やかな段差を有する階段状の昇降通路が確保されることとなる。
以上のように、第1実施形態によれば、リヤコンビランプ17Lを通常位置に位置させることにより後方からの視認性が確保されるとともに、作業者が架装物等を昇降する場合には、リヤコンビランプ17Lを退避位置に退避させることにより昇降経路を確保することができる。したがって、車両の走行中等におけるリヤコンビランプ17Lの視認性の確保と、作業中等における安全かつ容易な昇降といった昇降性の確保とを両立することができる。
【0025】
なお、リヤコンビランプ17Lが退避位置にあると、両リヤコンビランプ17L,17Rが左右非対称となって後方からの視認性が悪化するとともに、リヤコンビランプ17Lの角度が変わってしまい、特に方向指示器による表示が不正確になってしまう。そのため、リヤコンビランプ17Lは、高所作業車1の走行中、必ず通常位置になければならない。そこで、第1実施形態においては、リヤコンビランプ17Lを通常位置に復帰させるのを忘れてしまい、リヤコンビランプ17Lが退避位置に移動したままの状態で高所作業車1を走行させてしまうことがないように、コントローラCが次のような制御を行っている。
【0026】
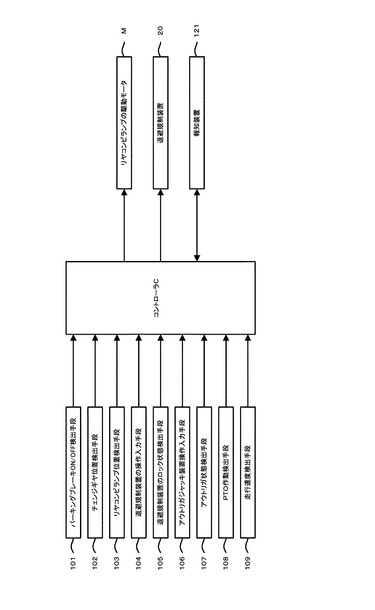
図6は、コントローラCの入力側(入力I/F)および出力側(出力I/F)に接続された各種装置を示すブロック図である。なお、図6においては、コントローラCに接続される種々の装置のうち特徴的なものを列記しているが、これら装置の中には、第1実施形態のコントローラCの制御においては不要なものも含まれている。
コントローラCの入力側には、パーキングブレーキON/OFF検出手段101、チェンジギヤ位置検出手段102、リヤコンビランプ位置検出手段103、退避規制装置の操作入力手段104、退避規制装置のロック状態検出手段105、アウトリガジャッキ装置操作入力手段106、アウトリガ状態検出手段107、PTO作動検出手段108、走行速度検出手段109が接続されている。
また、コントローラCの出力側には、駆動モータM、リヤコンビランプ17Lが通常位置から退避位置へ移動するのを規制する退避規制装置20(図3参照)、が接続されている。なお、スピーカやランプ等からなる報知装置121は、コントローラCの入力側および出力側の双方に接続されている。
【0027】
コントローラCは、CPU、ROM、RAMを備えており、入力側に接続された上記の各装置から信号が入力すると、CPUが入力信号を解析してROMに記憶された所定のプログラムを読み出し、入力信号によって検出された状態をRAMに記憶したり、出力側に接続された装置を制御したりする。
パーキングブレーキON/OFF検出手段101は、高所作業車1の移動を停止するためのパーキングブレーキ(制動装置)が停止制御状態にあるか(ONしているか)、解除状態にあるか(OFFしているか)を検出するものでる。このパーキングブレーキON/OFF検出手段101の構成は特に問わないが、例えば磁気センサやフォトセンサ等の位置検出センサ等によって、少なくとも、パーキングブレーキが停止制御状態から解除状態に、あるいは解除状態から停止制御状態に操作されたことを検出できればよい。
チェンジギヤ位置検出手段102は、変速ギヤの切り換え位置を検出するものである。第1実施形態においては、変速ギヤが切り換えられたことと、少なくとも変速ギヤの切り換え位置が動力の非伝達状態であるニュートラルにあることとを検出できれば、その構成は特に限定されない。
リヤコンビランプ位置検出手段103は、リヤコンビランプ17Lが通常位置から退避位置へ移動したり、退避位置から通常位置へ移動したりしたことを検出するものであり、例えば、磁気センサやフォトセンサ等の位置検出センサ等によって構成される。
【0028】
退避規制装置20は、リヤコンビランプ17Lの通常位置からの移動を規制するものであり、電磁ソレノイドによって構成されている。この退避規制装置20は、図3に示すように、リヤコンビランプ17Lに形成されたロック孔22に嵌合可能なロック部材21を備えている。そして、キャブ4内には、ロック孔22に嵌合しているロック部材21を、退避規制装置20内に没入させるように電流を励磁するためのボタン等からなる操作手段が設けられており、この操作手段の操作をコントローラCに入力するのが退避規制装置の操作入力手段104である。
退避規制装置のロック状態検出手段105は、例えば磁気センサやフォトセンサ等によって、上記のロック部材21が突出状態にあるのか没入状態にあるのかを検出するものである。
アウトリガジャッキ装置操作入力手段106は、キャブ4内に設けられた操作レバー等の操作信号をコントローラCに入力するものであり、アウトリガジャッキ装置9,10の張り出し操作、格納操作、ジャッキアップ操作のいずれの操作が行われたかをコントローラCに入力する。
アウトリガ状態検出手段107は、例えば磁気センサやフォトセンサ等の位置検出センサ等によって、上記のアウトリガジャッキ装置9,10が張り出し状態にあるのか格納状態にあるのかを検出するものである。
PTO(パワー・テイク・オフ)は、車両駆動用のエンジン動力を取り出して油圧ポンプを作動させるものであり、PTO作動検出手段108は、例えば油圧ポンプの作動状態からPTOが作動しているか否かを検出する。PTO作動検出手段108としては、例えば、油圧ポンプと架装物たるアクチュエータとを結ぶ油圧回路の圧力を検出するセンサが考えられる。
走行速度検出手段109は、高所作業車1の走行速度を検出してコントローラCに入力するものであるが、検出した走行速度を常時コントローラCに入力することとしてもよいし、所定速度以上を検出した場合にのみコントローラCに信号を入力することとしてもよい。
【0029】
コントローラCは、その入力側に接続された上記の各検出手段から信号が入力すると、当該入力信号に基づいて、RAMに現在の状態を記憶させるとともに、当該RAMに記憶している状態に応じた制御を行うこととなる。
例えば、高所作業車1を停止させてパーキングブレーキを停止制御状態に切り換え操作すると、パーキングブレーキON/OFF検出手段から、パーキングブレーキがOFFになったという信号がコントローラCに入力する。コントローラCのCPUは、入力した信号を解析してROMに格納された所定のプログラムを読み出し、パーキングブレーキがOFFになったことをRAMに記憶させる。このようにして、コントローラCは各種装置の状態を把握するとともに、RAMの記憶情報に基づいて図7に示す報知装置制御処理を行うこととなる。
【0030】
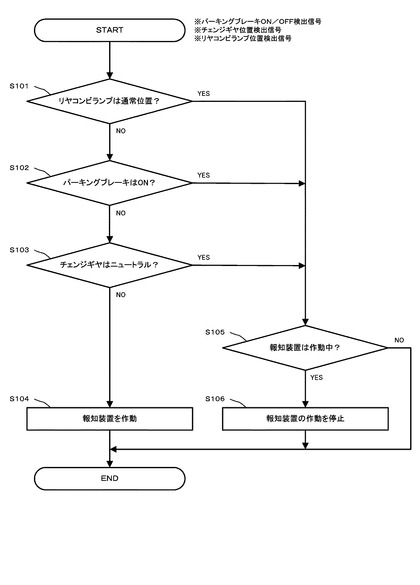
この図7に示す報知装置制御処理は、パーキングブレーキON/OFF検出手段101、チェンジギヤ位置検出手段102、リヤコンビランプ位置検出手段103のいずれかからコントローラCに信号が入力することによって実行される。
【0031】
(ステップS101)
上記検出手段101,102,103から信号が入力すると、CPUは、RAMの記憶情報からリヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS102に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合にはステップS105に処理を移す。
【0032】
(ステップS102)
上記ステップS101において、リヤコンビランプ17Lは通常位置にはない(退避位置にある)と判定した場合には、CPUは、RAMの記憶情報からパーキングブレーキがONしているか(停止制御状態であるか)否かを判定する。その結果、パーキングブレーキはONしていない(OFFである)と判定した場合には、ステップS103に処理を移し、パーキングブレーキがONしていると判定した場合には、ステップS105に処理を移す。
【0033】
(ステップS103)
上記ステップS102において、パーキングブレーキはONしていないと判定した場合には、CPUは、RAMの記憶情報からチェンジギヤはニュートラルであるか否かを判定する。その結果、チェンジギヤはニュートラルではないと判定した場合には、ステップS104に処理を移し、チェンジギヤはニュートラルであると判定した場合には、ステップS105に処理を移す。
【0034】
(ステップS104)
このステップS104の処理は、リヤコンビランプ17Lが通常位置ではなく(退避位置である)、パーキングブレーキがOFFになっており、かつ、チェンジギヤがニュートラルではない場合に行われる。パーキングブレーキがOFFで、かつ、チェンジギヤがニュートラルでない場合というのは、高所作業車1が走行状態であるか、もしくは走行可能状態である場合である。このように、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置にない場合には、CPUは報知装置121を作動させて警報を行い、リヤコンビランプ17Lが通常位置にないことを報知する。具体的には、報知装置121をスピーカ等の音声出力装置で構成した場合には、「リヤコンビランプを通常位置に戻してください」というメッセージを再生したり、警報音を出力したりする。また、報知装置121をランプで構成した場合には、当該報知装置121を、キャブ4内の運転者から見やすい位置等において点灯、点滅させて警報を行う。
【0035】
(ステップS105)
一方、上記ステップS101において、リヤコンビランプ17Lが通常位置にあると判定した場合(ステップS101のYES)や、上記ステップS102またはステップS103のいずれかにおいて、高所作業車1が停止状態にあると判定した場合(ステップS102またはステップS103のYES)には、CPUは報知装置121が作動中であるか否かを判定する。その結果、報知装置121が作動中であると判定した場合には、ステップS106に処理を移し、報知装置121は作動中ではないと判定した場合には、当該報知装置制御処理を終了する。
なお、このステップS105において報知装置121が作動中であると判定するのは次の場合である。すなわち、この報知装置制御処理は、パーキングブレーキON/OFF検出信号、チェンジギヤ位置検出信号、リヤコンビランプ位置検出信号のいずれかがコントローラCに入力したことを契機に開始される。このとき、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置になかった場合には、ステップS104において報知装置121が作動する。この報知装置121の作動に気付いて、リヤコンビランプ17Lを通常位置に復帰させたり、あるいはパーキングブレーキをONする操作やチェンジギヤをニュートラルに切り換える操作によって高所作業車1を停止状態にしたりすると、コントローラCに再びリヤコンビランプ位置検出信号、パーキングブレーキON/OFF検出信号、チェンジギヤ位置検出信号のいずれかが入力する。すると、この信号の入力を契機として、コントローラCにおいて再び図7に示す報知装置制御処理が開始することとなる。この場合には、ステップS101、ステップS102、ステップS103のいずれかで「YES」と判定されてステップS105の処理が行われ、当該ステップS105において報知装置121が作動中であると判定される。
【0036】
(ステップS106)
上記ステップS105において、報知装置121が作動中であると判定した場合には、CPUは、報知装置121の作動を停止させる処理を行う。具体的には、報知装置121をスピーカ等の音声出力装置で構成した場合には、上記のメッセージや警報音の出力を停止する処理を行い、報知装置121をランプで構成した場合には、点灯、点滅している当該ランプを消灯させる処理を行う。
【0037】
以上のように、第1実施形態によれば、高所作業車1を走行しようとしたときや走行中において、リヤコンビランプ17Lが通常位置にない場合に報知装置121による報知が行われるので、リヤコンビランプ17Lが視認しにくい状態で走行してしまうのを防ぐことができる。
なお、第1実施形態においては、高所作業車1が走行状態または走行可能状態にあるか否かを、パーキングブレーキの操作状況とチェンジギヤの操作状況との双方に基づいて判断することとしている。つまり、パーキングブレーキON/OFF検出手段101およびチェンジギヤ位置検出手段102によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段を構成するようにしている。
ただし、高所作業車1が走行状態または走行可能状態にあるか否かの判断を、パーキングブレーキの操作状況のみに基づいて行ってもよいし、チェンジギヤの操作状況のみに基づいて行ってもよい。つまり、本発明の走行可否検出手段をパーキングブレーキON/OFF検出手段101のみで構成してもよいし、チェンジギヤ位置検出手段102のみで構成することとしてもよい。この場合には、コントローラCのROMに格納された図7の処理を実行するプログラムにおいて、ステップS102またはステップS103のいずれかの処理を省くようにすればよい。
【0038】
図8を用いて、本発明の第2実施形態について説明する。なお、この第2実施形態の高所作業車は、コントローラCのROMに格納された報知装置制御処理を実行するプログラムのみが上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第2実施形態の特徴的な構成である報知装置制御処理について説明する。
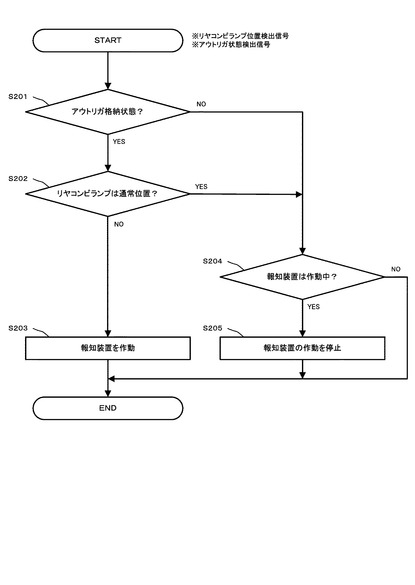
この第2実施形態においては、リヤコンビランプ位置検出手段103またはアウトリガ状態検出手段107からコントローラCに信号が入力することによって実行される。
【0039】
(ステップS201)
上記検出手段103,107から信号が入力すると、CPUは、RAMの記憶情報からアウトリガジャッキ装置9,10が格納状態にあるか否かを判定する。ここでは、アウトリガジャッキ装置9,10は一体的に制御されることとし、インナーボックス10b,10cがアウターボックス10aに完全に格納され、かつ、アウトリガ11b,11cがもっとも収縮している状態を格納状態とする。
アウトリガジャッキ装置9,10が格納状態であると判定した場合にはステップS202に処理を移し、アウトリガジャッキ装置9,10が格納状態ではないと判定した場合にはステップS204に処理を移す。
【0040】
(ステップS202)
上記ステップS201において、アウトリガジャッキ装置9,10が格納状態であると判定した場合には、CPUは、リヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS203に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合にはステップS204に処理を移す。
【0041】
(ステップS203)
このステップS203の処理は、アウトリガジャッキ装置9,10が格納状態であり、かつ、リヤコンビランプ17Lが通常位置ではない(退避位置である)場合に行われる。この第2実施形態においては、アウトリガジャッキ装置9,10の状態から、高所作業車1が走行状態または走行可能状態であると判断するようにしている。つまり、アウトリガジャッキ装置9,10が張り出していれば、高所作業車1は走行することができないが、アウトリガジャッキ装置9,10が格納されていれば高所作業車1は走行することができるので、アウトリガジャッキ装置9,10が格納状態であることをもって、高所作業車1の走行状態または走行可能状態と判断するのである。したがって、第2実施形態においては、アウトリガ状態検出手段107によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されることとなる。
上記のように、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置にない場合には、CPUは報知装置121を作動させて警報を行い、リヤコンビランプ17Lが通常位置にないことを報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0042】
(ステップS204)
一方、上記ステップS201において、アウトリガジャッキ装置9,10が格納状態ではない(張り出し状態である)と判定した場合(ステップS201のNO)や、上記ステップS202において、リヤコンビランプ17Lが通常位置にあると判定した場合(ステップS202のYES)には、CPUは報知装置121が作動中であるか否かを判定する。その結果、報知装置121が作動中であると判定した場合には、ステップS205に処理を移し、報知装置121は作動中ではないと判定した場合には、当該報知装置制御処理を終了する。
なお、このステップS204において報知装置121が作動中であると判定するのは次の場合である。すなわち、この報知装置制御処理は、リヤコンビランプ位置検出信号またはアウトリガ状態検出信号がコントローラCに入力したことを契機に開始される。このとき、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置になかった場合には、ステップS203において報知装置121が作動する。この報知装置121の作動に気付いて、リヤコンビランプ17Lを通常位置に復帰させたり、あるいはアウトリガジャッキ装置9,10を張り出す操作を行ったりすると、コントローラCに再びリヤコンビランプ位置検出信号またはアウトリガ状態検出信号が入力する。すると、この信号の入力を契機として、コントローラCにおいて再び図8に示す報知装置制御処理が開始することとなる。この場合には、ステップS201で「NO」と判定されるか、ステップS202で「YES」と判定されて、ステップS204の処理が行われ、当該ステップS204において報知装置121が作動中であると判定される。
【0043】
(ステップS205)
上記ステップS204において、報知装置121が作動中であると判定した場合には、CPUは、報知装置121の作動を停止させる処理を行う。なお、この停止処理も上記第1実施形態と同様であるので詳細な説明は省略する。
【0044】
以上のように、この第2実施形態においても、上記第1実施形態と同様に、高所作業車1を走行しようとしたときや走行中において、リヤコンビランプ17Lが通常位置にない場合に報知装置121による報知が行われるので、リヤコンビランプ17Lが視認しにくい状態で走行してしまうのを防ぐことができる。
なお、第2実施形態においては、アウトリガ状態検出手段を、インナーボックス10b,10cやアウトリガ11b,11c等の位置を検出するセンサによって構成したが、アウトリガ状態検出手段を、例えば、アウトリガ11やアウトリガフロート12の圧力を検知する圧力センサによって構成してもよい。いずれにしても、アウトリガジャッキ装置9,10の状態を検出することができれば、その構成は特にどのようなものであっても構わない。
また、第2実施形態においては、アウトリガジャッキ装置9,10が完全に格納された状態を高所作業車1の走行状態または走行可能状態と判断するようにしたが、アウトリガフロート12が接地面から離れていれば、理論上、走行が可能となる。したがって、アウトリガフロート12が接地面から離れた状態を高所作業車1の走行状態または走行可能状態と判断するようにしてもよく、この場合には、アウトリガ状態検出手段がアウトリガフロート12と接地面との接地状態を検出するものであればよい。
【0045】
図9を用いて、本発明の第3実施形態について説明する。なお、この第3実施形態の高所作業車は、コントローラCのROMに格納された報知装置制御処理を実行するプログラムのみが上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第3実施形態の特徴的な構成である報知装置制御処理について説明する。
この第3実施形態においては、リヤコンビランプ位置検出手段103またはPTO作動検出手段108からコントローラCに信号が入力することによって実行される。なお、PTO作動検出手段108は、油圧ポンプが作動したときにコントローラCに作動開始信号を入力し、油圧ポンプの作動が停止したときにコントローラCに作動停止信号を入力する。コントローラCにおいては、作動開始信号の入力に基づいてRAMにフラグをONするとともに、作動停止信号の入力に基づいてRAMにONされているフラグをOFFするようにしている。
【0046】
(ステップS301)
上記検出手段103,108から信号が入力すると、CPUは、RAMにフラグがONしているか否かを判断して、PTO(油圧ポンプ)が作動しているか否かを判定する。その結果、PTO(油圧ポンプ)が作動していないと判定した場合にはステップS301に処理を移し、PTO(油圧ポンプ)が作動していると判定した場合にはステップS304に処理を移す。
【0047】
(ステップS302)
上記ステップS301において、PTO(油圧ポンプ)は作動していないと判定した場合には、CPUは、リヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS303に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合にはステップS304に処理を移す。
【0048】
(ステップS303)
このステップS303の処理は、PTO(油圧ポンプ)が作動を停止しており、かつ、リヤコンビランプ17Lが通常位置ではない(退避位置である)場合に行われる。この第3実施形態においては、PTO(油圧ポンプ)の作動状態から、高所作業車1が走行状態または走行可能状態であると判断するようにしている。つまり、PTO(油圧ポンプ)が作動していれば、高所作業車1の作業中または作業待機中とみなすことができるので、この場合には高所作業車1は走行することができないと判断し、PTO(油圧ポンプ)が作動していなければ、高所作業車1の作業は行われていないとみなすことができるので、この場合には高所作業車1の走行状態または走行可能状態と判断するのである。したがって、第3実施形態においては、PTO作動検出手段によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されることとなる。
上記のように、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置にない場合には、CPUは報知装置121を作動させて警報を行い、リヤコンビランプ17Lが通常位置にないことを報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0049】
(ステップS304)
一方、上記ステップS301において、PTO(油圧ポンプ)は作動中であると判定した場合(ステップS301のYES)や、上記ステップS302において、リヤコンビランプ17Lが通常位置にあると判定した場合(ステップS302のYES)には、CPUは報知装置121が作動中であるか否かを判定する。その結果、報知装置121が作動中であると判定した場合には、ステップS305に処理を移し、報知装置121は作動中ではないと判定した場合には、当該報知装置制御処理を終了する。
なお、このステップS304において報知装置121が作動中であると判定するのは次の場合である。すなわち、この報知装置制御処理は、リヤコンビランプ位置検出信号またはPTO作動検出信号がコントローラCに入力したことを契機に開始される。このとき、PTO(油圧ポンプ)が作動停止状態であるにも関わらず、言い換えれば、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置になかった場合には、ステップS303において報知装置121が作動する。この報知装置121の作動中に、リヤコンビランプ17Lを通常位置に復帰させたり、あるいはPTO(油圧ポンプ)を作動させたりすると、コントローラCに再びリヤコンビランプ位置検出信号またはPTO作動検出信号が入力する。すると、この信号の入力を契機として、コントローラCにおいて再び図9に示す報知装置制御処理が開始することとなる。この場合には、ステップS301で「YES」と判定されるか、ステップS302で「YES」と判定されて、ステップS304の処理が行われ、当該ステップS304において報知装置121が作動中であると判定される。
【0050】
(ステップS305)
上記ステップS304において、報知装置121が作動中であると判定した場合には、CPUは、報知装置121の作動を停止させる処理を行う。なお、この停止処理も上記第1実施形態と同様であるので詳細な説明は省略する。
【0051】
以上のように、この第3実施形態においても、上記第1実施形態と同様に、高所作業車1を走行しようとしたときや走行中において、リヤコンビランプ17Lが通常位置にない場合に報知装置121による報知が行われるので、リヤコンビランプ17Lが視認しにくい状態で走行してしまうのを防ぐことができる。
【0052】
図10を用いて、本発明の第4実施形態について説明する。なお、この第4実施形態の高所作業車は、コントローラCのROMに格納された報知装置制御処理を実行するプログラムのみが上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第4実施形態の特徴的な構成である報知装置制御処理について説明する。
この第4実施形態においては、リヤコンビランプ位置検出手段103または走行速度検出手段109からコントローラCに信号が入力することによって実行される。なお、走行速度検出手段109は、高所作業車1の走行速度を検出する速度計を備えており、この速度計が計測する速度を示す速度検出信号が常時コントローラCに入力するようにしている。
【0053】
(ステップS401)
上記検出手段103,109から信号が入力すると、CPUは、入力した速度検出信号を解析し、予め設定した速度を超過しているか否かを判定する。その結果、予め設定した速度を超過していると判定した場合にはステップS402に処理を移し、予め設定した速度を超過していないと判定した場合にはステップS404に処理を移す。
【0054】
(ステップS402)
上記ステップS401において、所定速度を超過していると判定した場合には、CPUは、リヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS403に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合にはステップS404に処理を移す。
【0055】
(ステップS403)
このステップS403の処理は、高所作業車1の走行速度が予め設定された速度を超過しており、かつ、リヤコンビランプ17Lが通常位置ではない(退避位置である)場合に行われる。つまり、第4実施形態においては、走行速度検出手段109によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されている。
上記のように、リヤコンビランプ17Lが通常位置にないまま、高所作業車1が所定の速度を超過して走行している場合には、CPUは、報知装置121を作動させて警報を行い、リヤコンビランプ17Lが通常位置にないことを報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0056】
(ステップS404)
一方、上記ステップS401において、予め設定した速度を超過していないと判定した場合(ステップS401のNO)や、上記ステップS402において、リヤコンビランプ17Lが通常位置にあると判定した場合(ステップS402のYES)には、CPUは報知装置121が作動中であるか否かを判定する。その結果、報知装置121が作動中であると判定した場合には、ステップS405に処理を移し、報知装置121は作動中ではないと判定した場合には、当該報知装置制御処理を終了する。
なお、このステップS404において報知装置121が作動中であると判定するのは次のような場合である。例えば、リヤコンビランプ17Lが通常位置にない状態で高所作業車1を走行させるとともに、その走行速度が予め設定した速度を超過すると、ステップS403において報知装置121が作動する。この報知装置121の作動中に、リヤコンビランプ17Lを通常位置に復帰させたり、あるいは予め設定した速度まで減速させたりすると、ステップS401で「NO」と判定されるか、ステップS402で「YES」と判定されて、ステップS404の処理が行われ、当該ステップS404において報知装置121が作動中であると判定される。
【0057】
(ステップS405)
上記ステップS404において、報知装置121が作動中であると判定した場合には、CPUは、報知装置121の作動を停止させる処理を行う。なお、この停止処理も上記第1実施形態と同様であるので詳細な説明は省略する。
【0058】
以上のように、この第4実施形態によれば、リヤコンビランプ17Lが通常位置にない状態で高所作業車1を走行させると、報知装置121による報知が行われるので、リヤコンビランプ17Lが視認しにくい状態で走行してしまうのを防ぐことができる。
【0059】
図11、図12を用いて、本発明の第5実施形態について説明する。なお、この第5実施形態の高所作業車は、上記第1実施形態の高所作業車において、コントローラCのROMに規制装置制御処理を実行するプログラムがさらに格納された点のみ上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第5実施形態の特徴的な構成である規制装置制御処理について説明する。
この規制装置制御処理は、高所作業車1の走行中に、振動や衝撃等の何らかの理由によって、リヤコンビランプ17Lが通常位置から退避位置へ移動してしまうのを防ぐために行われる。リヤコンビランプ17Lの通常位置から退避位置への移動は、図3に示すように、退避規制装置20のロック部材21が、リヤコンビランプ17Lに形成されたロック孔22に嵌合することによって規制される。
なお、この第5実施形態の規制装置制御処理は、走行状態または走行可能状態となったときに、リヤコンビランプ17Lの通常位置からの移動を自動的に規制するとともに、走行停止状態において、退避規制装置の操作入力手段104から解除信号が入力することによって、上記の規制を解除するものである。
【0060】
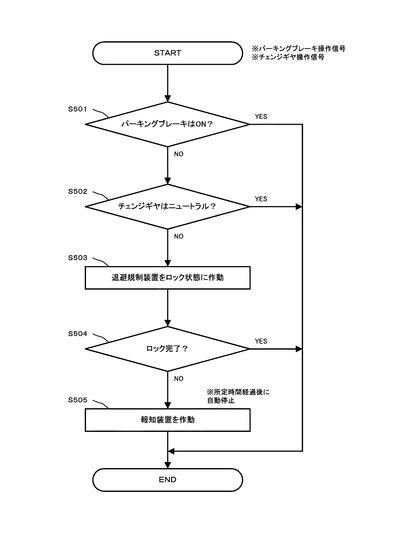
図11に示す規制装置制御処理は、パーキングブレーキON/OFF検出手段101またはチェンジギヤ位置検出手段102からコントローラCに信号が入力することによって実行される。
【0061】
(ステップS501)
上記検出手段101,102から信号が入力すると、CPUは、RAMの記憶情報からパーキングブレーキがONしているか(停止制御状態であるか)否かを判定する。その結果、パーキングブレーキはONしていない(OFFである)と判定した場合には、ステップS502に処理を移し、パーキングブレーキがONしていると判定した場合には、当該規制装置制御処理を終了する。
【0062】
(ステップS502)
上記ステップS501において、パーキングブレーキはONしていないと判定した場合には、CPUは、RAMの記憶情報からチェンジギヤはニュートラルであるか否かを判定する。その結果、チェンジギヤはニュートラルではないと判定した場合には、ステップS503に処理を移し、チェンジギヤはニュートラルであると判定した場合には、当該規制装置制御処理を終了する。
【0063】
(ステップS503)
上記ステップS502において、チェンジギヤはニュートラルではないと判定した場合には、CPUは、退避規制装置20に電流を励磁してロック部材21を突出させる。
つまり、このステップS503の処理が行われる場合というのは、パーキングブレーキがOFFとなっており、しかも、チェンジギヤがニュートラルではない場合である。CPUは、こうした状態を高所作業車1の走行状態または走行可能状態と判断し、自動的に退避規制装置20によってリヤコンビランプ17Lを通常位置に規制することとなる。
【0064】
(ステップS504)
次に、CPUは、退避規制装置のロック状態検出手段105から、ロック部材21が突出状態となったか否かの信号が入力したか否かを判定する。なお、上記ステップS503において退避規制装置20に電流が励磁されてから、実際にロック部材21が正規に突出するまでの間には多少のタイムラグが生じる。したがって、厳密にいえば、CPUは、上記ステップS503の処理が行われるのと同時に、例えば1秒等の所定の時間をタイマカウンタにセットするとともに、この時間が経過するまでステップS504の処理をループさせる。
そして、所定の時間が経過してもロック部材21が正規の突出状態とならなかった場合には、ステップS505に処理を移し、所定の時間内にロック部材21が正規の突出状態となった場合には、当該規制装置制御処理を終了する。
【0065】
(ステップS505)
上記ステップS504において、ロック部材21が正規の突出状態にならないと判定した場合には、CPUは、報知装置121を作動して、リヤコンビランプ17Lがロックされていない旨を所定時間報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0066】
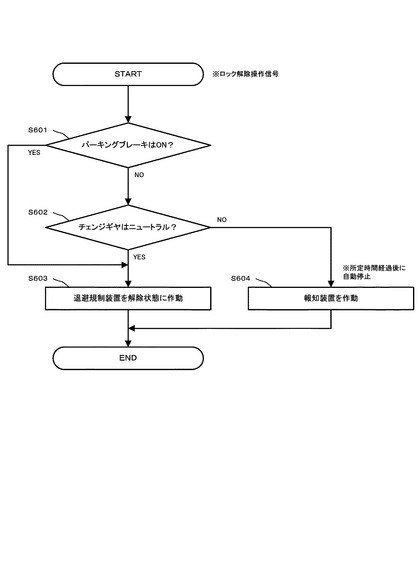
また、この第5実施形態においては、キャブ4に設けられたボタン等からなる操作手段を操作することにより、退避規制装置の操作入力手段104からコントローラCにロック解除操作信号が入力し、リヤコンビランプ17Lの通常位置から退避位置への移動が許容される。言い換えれば、操作手段を操作することで、リヤコンビランプ17Lのロックを解除するようにしているが、コントローラCにロック解除操作信号が入力することによって、図12に示す規制装置制御処理が実行される。
【0067】
(ステップS601)
上記退避規制装置の操作入力手段104からロック解除操作信号が入力すると、CPUは、RAMの記憶情報からパーキングブレーキがONしているか(停止制御状態であるか)否かを判定する。その結果、パーキングブレーキはONしていない(OFFである)と判定した場合には、ステップS602に処理を移し、パーキングブレーキがONしていると判定した場合には、ステップS603に処理を移す。
【0068】
(ステップS602)
上記ステップS601において、パーキングブレーキはONしていないと判定した場合には、CPUは、RAMの記憶情報からチェンジギヤはニュートラルであるか否かを判定する。その結果、チェンジギヤはニュートラルであると判定した場合には、ステップS603に処理を移し、チェンジギヤはニュートラルではないと判定した場合には、ステップS604に処理を移す。
【0069】
(ステップS603)
上記ステップS601においてパーキングブレーキがONしていると判定した場合、あるいは上記ステップS602においてチェンジギヤがニュートラルであると判定した場合には、CPUは、退避規制装置20の電流を励磁して、ロック部材21を没入状態となるように作動させる。
つまり、このステップS603の処理が行われる場合というのは、パーキングブレーキがONとなっているか、チェンジギヤがニュートラルである場合である。CPUは、こうした状態から、高所作業車1が走行状態または走行可能状態ではないと判断し、リヤコンビランプ17Lのロックを解除することとなる。
【0070】
(ステップS604)
一方、上記ステップS603において、チェンジギヤはニュートラルではないと判定した場合には、CPUは、報知装置121を作動して、リヤコンビランプ17Lのロックを解除できない旨を所定時間報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0071】
以上のように、この第5実施形態によれば、高所作業車1が走行状態または走行可能状態となったところで自動的にリヤコンビランプ17Lが通常位置にロックされるので、ロックをし忘れることがなく、走行中の振動や衝撃等によってリヤコンビランプ17Lが退避位置に移動してしまうことがない。また、走行状態または走行可能状態においては、ロックが解除されないようにしたので、人為的なミスが生じず、走行中におけるリヤコンビランプ17Lの視認性を常に確保することができる。
なお、第5実施形態においては、高所作業車1が走行状態または走行可能状態にあるか否かを、パーキングブレーキの操作状況とチェンジギヤの操作状況との双方に基づいて判断することとしている。つまり、パーキングブレーキON/OFF検出手段101およびチェンジギヤ位置検出手段102によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段を構成するようにしている。
ただし、高所作業車1が走行状態または走行可能状態にあるか否かの判断を、パーキングブレーキの操作状況のみに基づいて行ってもよいし、チェンジギヤの操作状況のみに基づいて行ってもよい。つまり、本発明の走行可否検出手段をパーキングブレーキON/OFF検出手段101のみで構成してもよいし、チェンジギヤ位置検出手段102のみで構成することとしてもよい。この場合には、コントローラCのROMに格納された図11または図12の処理を実行するプログラムにおいて、ステップS501およびステップS601、または、ステップS502およびステップS602のいずれかの処理を省くようにすればよい。
【0072】
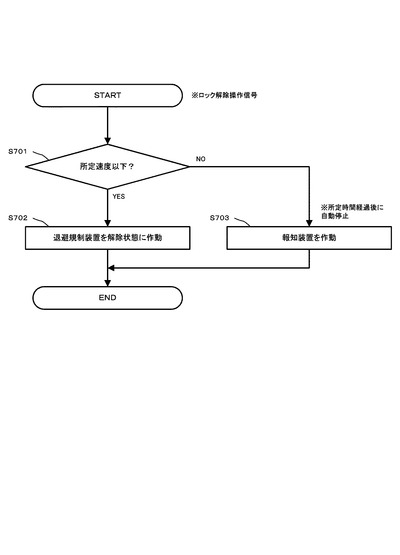
図13を用いて、本発明の第6実施形態について説明する。なお、この第6実施形態の高所作業車は、コントローラCのROMに格納された規制装置制御処理を実行するプログラムのみが上記第5実施形態と異なり、その他の構成は全て上記第5実施形態と同じである。したがって、上記第5実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第6実施形態の特徴的な構成である規制装置制御処理について説明する。なお、この第6実施形態においても、図11に示す規制装置制御処理が実行され、図12に示す処理に代わって図13に示す処理が実行される。この図13に示す規制装置制御処理は、退避規制装置の操作入力手段104からコントローラCにロック解除操作信号が入力することによって実行される。
【0073】
(ステップS701)
退避規制装置の操作入力手段104から解除操作信号が入力すると、CPUは、走行速度検出手段から入力する高所作業車1の走行速度が予め設定された速度以下であるか否かを判定する。その結果、予め設定した速度以下であると判定した場合にはステップS702に処理を移し、予め設定した速度を超過していると判定した場合にはステップS703に処理を移す。
【0074】
(ステップS702)
上記ステップS701において、走行速度検出手段109から入力する高所作業車1の走行速度が、所定速度以下であると判定した場合には、CPUは、退避規制装置20の電流を励磁して、ロック部材21を没入状態となるように作動させる。
つまり、この第6実施形態においては、走行速度が所定速度以下であることをもって、高所作業車1の走行状態または走行可能状態ではないと判断し、リヤコンビランプ17Lのロックを解除することとなる。つまり、第6実施形態においては、走行速度検出手段109によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されている。
【0075】
(ステップS703)
一方、上記ステップS701において、走行速度検出手段109から入力する高所作業車1の走行速度が、所定速度以下ではないと判定した場合には、CPUは報知装置121を作動して、リヤコンビランプ17Lのロックを解除できない旨を所定時間報知する。なお、報知装置121の作動内容については上記第5実施形態と同様である。
以上のように、この第6実施形態においては、走行速度が所定速度以下であることに基づいて、高所作業車1が走行状態または走行可能状態でないと判断するようにしたが、この実施形態によっても上記第5実施形態と同様の効果を実現することができる。
【0076】
なお、上記第5,6実施形態においては、パーキングブレーキON/OFF検出手段101、チェンジギヤ位置検出手段102、走行速度検出手段109によって、車両が走行状態または走行可能状態にあることを検出することとしたが、上記第2,3実施形態と同様に、アウトリガ状態検出手段107またはPTO作動検出手段108によって、車両が走行状態または走行可能状態にあることを検出するようにしても構わない。つまり、規制装置制御処理には本発明の走行可否検出手段が必要となるが、車両が走行状態または走行可能状態であるか否かを判断することができれば、その構成は上記第5,6実施形態に限らない。
また、上記第5,6実施形態を、上記第1〜4実施形態と適宜組み合わせて、報知装置制御処理と規制装置制御処理とを行うようにしてもよいこと当然である。
【0077】
図14を用いて、本発明の第7実施形態について説明する。なお、この第7実施形態の高所作業車は、上記第1実施形態の高所作業車において、コントローラCのROMに駆動装置制御処理を実行するプログラムがさらに格納された点のみ上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第7実施形態の特徴的な構成である駆動装置制御処理について説明する。
この駆動装置制御処理は、走行状態または走行可能状態となったときに、リヤコンビランプ17Lを通常位置に復帰させるのを忘れて、リヤコンビランプ17Lが退避位置にあるまま走行してしまうのを防ぐためのものである。
【0078】
この図14に示す駆動装置制御処理は、パーキングブレーキON/OFF検出手段101またはチェンジギヤ位置検出手段102からコントローラCに信号が入力することによって実行される。
【0079】
(ステップS801)
上記検出手段101,102から信号が入力すると、CPUは、RAMの記憶情報からパーキングブレーキがONしているか(停止制御状態であるか)否かを判定する。その結果、パーキングブレーキはONしていない(OFFである)と判定した場合には、ステップS802に処理を移し、パーキングブレーキがONしていると判定した場合には、当該駆動装置制御処理を終了する。
【0080】
(ステップS802)
上記ステップS801において、パーキングブレーキはONしていないと判定した場合には、CPUは、RAMの記憶情報からチェンジギヤはニュートラルであるか否かを判定する。その結果、チェンジギヤはニュートラルではないと判定した場合には、ステップS803に処理を移し、チェンジギヤはニュートラルであると判定した場合には、当該駆動装置制御処理を終了する。
【0081】
(ステップS803)
このステップS803の処理は、パーキングブレーキがOFFになっており、かつ、チェンジギヤがニュートラルではない場合に行われる。パーキングブレーキがOFFで、かつ、チェンジギヤがニュートラルでない場合というのは、高所作業車1が走行状態であるか、もしくは走行可能状態である場合である。
このように、走行状態または走行可能状態となった場合には、CPUは、リヤコンビランプ17Lを通常位置に復帰させるように駆動モータMを駆動する。なお、この第7実施形態においては、駆動モータMをパルスモータで構成しており、リヤコンビランプ17Lが通常位置に到達したところで当該駆動モータMの駆動が停止することとなる。ただし、駆動モータMを油圧モータや他の電気モータで構成した場合には、リヤコンビランプ位置検出手段103から、当該リヤコンビランプ17Lが通常位置にあることを検出する信号が入力したことを契機として、モータの駆動を停止する制御を行うようにすればよい。
【0082】
以上のように、この第7実施形態によれば、高所作業車1が走行状態または走行可能状態となったときに、リヤコンビランプ17Lが自動で通常位置に復帰するので、リヤコンビランプ17Lを通常位置に復帰させるのを忘れてしまうといった人為的ミスを確実に防ぐことができる。
なお、第7実施形態においては、高所作業車1が走行状態または走行可能状態にあるか否かを、パーキングブレーキの操作状況とチェンジギヤの操作状況との双方に基づいて判断することとしている。つまり、パーキングブレーキON/OFF検出手段101およびチェンジギヤ位置検出手段102によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段を構成するようにしている。
ただし、高所作業車1が走行状態または走行可能状態にあるか否かの判断を、パーキングブレーキの操作状況のみに基づいて行ってもよいし、チェンジギヤの操作状況のみに基づいて行ってもよい。つまり、本発明の走行可否検出手段をパーキングブレーキON/OFF検出手段101のみで構成してもよいし、チェンジギヤ位置検出手段102のみで構成することとしてもよい。この場合には、コントローラCのROMに格納された図14の処理を実行するプログラムにおいて、ステップS801またはステップS802のいずれかの処理を省くようにすればよい。
【0083】
図15を用いて、本発明の第8実施形態について説明する。なお、この第8実施形態の高所作業車は、コントローラCのROMに格納された駆動装置制御処理を実行するプログラムのみが上記第7実施形態と異なり、その他の構成は全て上記第7実施形態と同じである。したがって、上記第7実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第8実施形態の特徴的な構成である駆動装置制御処理について説明する。
この第8実施形態においては、走行速度検出手段109からコントローラCに信号が入力することによって実行される。なお、走行速度検出手段109は、高所作業車1の走行速度を検出する速度計を備えており、この速度計が計測する速度を示す速度検出信号が常時コントローラCに入力するようにしている。
【0084】
(ステップS901)
走行速度検出手段109から信号が入力すると、CPUは、入力した速度検出信を解析し、予め設定した速度を超過しているか否かを判定する。その結果、予め設定した速度を超過していると判定した場合にはステップS902に処理を移し、予め設定した速度を超過していないと判定した場合には当該駆動装置制御処理を終了する。
【0085】
(ステップS902)
上記ステップS901において、所定速度を超過していると判定した場合には、CPUは、リヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS903に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合には当該駆動装置制御処理を終了する。
【0086】
(ステップS903)
このステップS903の処理は、高所作業車1の走行速度が予め設定された速度を超過しており、かつ、リヤコンビランプ17Lが通常位置ではない(退避位置である)場合に行われる。つまり、第8実施形態においては、走行速度検出手段109によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されている。
上記のように、リヤコンビランプ17Lが通常位置にないまま、高所作業車1が所定の速度を超過して走行している場合には、CPUは、リヤコンビランプ17Lを通常位置に復帰させるように駆動モータMを駆動する。なお、駆動モータMの駆動については上記第7実施形態と同様である。
以上のように、この第8実施形態によっても、上記第7実施形態と同様の効果を実現することができる。
【0087】
図16を用いて、本発明の第9実施形態について説明する。なお、この第9実施形態の高所作業車は、コントローラCのROMに格納された駆動装置制御処理を実行するプログラムのみが上記第7実施形態と異なり、その他の構成は全て上記第7実施形態と同じである。したがって、上記第7実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第9実施形態の特徴的な構成である駆動装置制御処理について説明する。
この第9実施形態においては、アウトリガジャッキ装置9,10を張り出すように操作レバー等のアウトリガ操作手段を操作した場合(張り出し操作を行った場合)には、アウトリガジャッキ装置操作入力手段106は張り出し操作信号を出力する。また、アウトリガジャッキ装置9,10を格納するように操作レバー等のアウトリガ操作手段を操作した場合(格納操作を行った場合)には、アウトリガジャッキ装置操作入力手段106は、格納操作信号を出力する。この第9実施形態においては、アウトリガジャッキ装置操作入力手段106から、コントローラCに上記の張り出し操作信号または格納操作信号が入力することによって実行される。
【0088】
(ステップS1001)
アウトリガジャッキ装置操作入力手段106から信号が入力すると、CPUは、当該操作信号が格納操作信号であるか否かを判定する。その結果、コントローラCに入力した信号が、格納操作信号であると判定した場合にはステップS1002に処理を移し、張り出し操作信号であると判定した場合にはステップS1003に処理を移す。
【0089】
(ステップS1002)
上記ステップS1001において、コントローラCに入力した信号が格納操作信号であると判定した場合には、CPUは、リヤコンビランプ17Lを通常位置に復帰させるように駆動モータMを駆動する。なお、駆動モータMの駆動については上記第7実施形態と同様である。
【0090】
(ステップS1003)
一方、上記ステップS1001において、コントローラCに入力した信号が格納操作信号ではない(張り出し操作信号である)と判定した場合には、CPUは、リヤコンビランプ17Lを退避位置に移動させるように駆動モータMを駆動する。
【0091】
以上のように、この第9実施形態においては、アウトリガ格納操作が行われたことをもって、車両が走行状態または走行可能状態にあると判断し、アウトリガ張り出し操作が行われたことをもって、車両が走行状態または走行可能状態ではないと判断している。したがって、この第9実施形態においては、アウトリガジャッキ装置操作入力手段106によって、本発明の走行可否検出手段が構成されることとなる。
この第9実施形態によれば、アウトリガ操作手段による格納操作に基づいて、リヤコンビランプ17Lを通常位置へ復帰させるので、作業の終了とともにリヤコンビランプ17Lが通常位置へ復帰することとなる。したがって、リヤコンビランプ17Lを通常位置へ復帰するのを忘れてしまうことがなく、当該リヤコンビランプ17Lを視認しにくい状態で走行してしまうのを防ぐことができ、走行中におけるリヤコンビランプ17Lの視認性を常に確保することができる。
しかも、アウトリガ操作手段による張り出し操作に基づいて、リヤコンビランプ17Lを退避位置へ移動させるので、車両が安定支持される状態になってから作業者を架装物に昇らせることができる。言い換えれば、車両が安定支持されない状態では、昇降経路上にリヤコンビランプ17Lを位置させて作業者の昇降を妨げることができ、これによって作業者が架装物に昇る際の安全を確保することができる。
【0092】
なお、上記第7〜9実施形態においては、パーキングブレーキON/OFF検出手段101、チェンジギヤ位置検出手段102、走行速度検出手段109、アウトリガジャッキ装置操作入力手段106によって、車両が走行状態または走行可能状態にあることを検出することとしたが、上記第2,3実施形態と同様に、アウトリガ状態検出手段107またはPTO作動検出手段108によって、車両が走行状態または走行可能状態にあることを検出するようにしても構わない。つまり、駆動装置制御処理には本発明の走行可否検出手段が必要となるが、車両が走行状態または走行可能状態であるか否かを判断することができれば、その構成は上記第7〜9実施形態に限らない。
また、上記第7〜9実施形態を、上記第1〜6実施形態と適宜組み合わせて、駆動装置制御処理と、報知装置制御処や規制装置制御処理とを行うようにしてもよいこと当然である。
【0093】
なお、上記第1〜9実施形態におけるリヤコンビランプ17Lが、本発明の後方灯火手段に相当する。
また、上記第1〜9実施形態におけるバケット7が、本発明の作業床に相当する。
また、CPUがROMに格納されたプログラムを読み出して行う、図7〜図10に示す報知装置制御処理が、本発明の報知手段に相当する。
また、CPUがROMに格納されたプログラムを読み出して行う、図11〜図13に示す規制装置制御処理が、本発明の退避規制手段に相当する。
また、上記第1〜9実施形態における駆動モータMが、本発明の駆動装置に相当する。
また、CPUがROMに格納されたプログラムを読み出して行う、図14〜図16に示す駆動装置制御処理が、本発明の駆動制御手段に相当する。
【符号の説明】
【0094】
1 高所作業車
2 車台
5 ブーム
6 旋回装置
7 バケット
8 起伏シリンダ
9,10 アウトリガジャッキ装置
17L,17R リヤコンビランプ
20 退避規制装置
21 ロック部材
22 ロック孔
101 パーキングレーキON/OFF検出手段
102 チェンジギヤ位置検出手段
103 リヤコンビランプ位置検出手段
104 退避規制装置の操作入力手段
105 退避規制装置のロック状態検出手段
106 アウトリガジャッキ装置操作入力手段
107 アウトリガ状態検出手段
108 PTO作動検出手段
109 走行速度検出手段
121 報知装置
C コントローラ
M 駆動モータ
S1,S2 本発明の踏み面として機能するスペース
【技術分野】
【0001】
本発明は、荷台や荷室あるいは昇降装置等の機械装置といった架装物が車台に架装された作業用車両に関する。
【背景技術】
【0002】
作業用車両として、荷台や荷室が車台に架装された運搬車や、クレーン装置、ミキサー装置、昇降装置等の種々の機械装置が車台に架装された特装車が知られている。こうした作業用車両においては、作業を行うにあたって作業者の架装物への昇降が要求される場合がある。特に、昇降装置を備えた高所作業車においては、作業者が車両に設けられた作業床に乗り込むことが前提となる。
そこで、従来の作業用車両として、特許文献1に示されるものが知られている。この作業用車両においては、架装物を昇降するためのステップが、車台上において比較的スペースを確保しやすい車両後方に配置され、作業者が架装物に安全かつ容易に昇降できるようにしている。
【0003】
また、上記した各種の作業用車両は、当然のことながら公道等を自走することが前提となる。したがって、車両の後方には、車両の存在を知らせるテールランプや、車両の走行状態等を知らせるブレーキランプ、方向指示器、あるいはこれらを一体化したコンビネーションランプからなる後方灯火手段が設けられている。このとき、作業用車両には種々の架装物が架装されているため、こうした架装物に干渉せず、しかも架装物によって視認性が低下しないように、後方灯火手段を配置しなければならない。
上記特許文献1に示される作業用車両においては、後方灯火手段(コンビネーションランプ35)を車両の後端よりも前方寄りであって、かつ、架装物の上部に配置することにより、架装物との干渉を避けながらも、架装物によって視認性が低下しないようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−240400
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に示される作業用車両においては、後方灯火手段が車両の後端や架装物よりも前方に配置されている。そのため、車両後方の所定の位置(例えば、車両の左後方や右後方の低い位置)からは、どうしても架装物によって視界が遮られてしまい、後方灯火手段の視認性が低下してしまう。
そこで、後方灯火手段を、高さを維持したまま車両の後方に移動して、ステップの上方に配置することが考えられる。しかしながら、ステップの上方に後方灯火手段が位置することとなれば、架装物と干渉するおそれがあり、さらには、作業者が架装物を昇降する過程において、後方灯火手段が障害物となってしまい、安全かつ容易な昇降ができなくなってしまう。
また、車台に架装される架装物の形状や配置はさまざまであり、後方灯火手段が最適な視認性を確保できる位置は車両ごとに異なる。そのため、上記の作業用車両においては、架装物の形状や配置が変更された場合に、必ずしも視認性が確保されるとは限らない。
以上のように、従来の作業用車両においては、架装物への昇降性と後方灯火手段の視認性とを両立したものではなく、しかも汎用性に乏しいという問題があった。
【0006】
本発明は、架装物の形状や配置に関わりなく、架装物への昇降性と後方灯火手段の視認性とを両立することができる作業用車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、架装物が架装された車台に、該車台の後方から視認可能な後方灯火手段が設けられ、前記架装物または車台の一部、もしくは、前記架装物または車台に取り付けられた専用部材によって形成される複数段の踏み面を有する昇降経路を備えた作業用車両を前提とする。
本発明において、架装物とは、荷台や荷室、種々の機械装置を広く含むものであり、特に機械装置を架装物とした場合に、その構成や用途等は限定されるものではない。したがって、本発明の作業用車両には、荷物、重機、車両等を運搬するための運搬車、高所作業車やクレーン車等の建設作業車はもちろんのこと、ミキサー車やゴミ収集車等のその他の車両も含まれる。いずれにしても、本発明の作業用車両には、車台に何らかの目的を有する架装物が架装されたものが広く含まれる。
本発明の後方灯火手段は、車台すなわち車両の後方から灯火状態を視認することができるものを広く含むものである。本発明の後方灯火手段としては、例えば、夜間等に車両の存在を後方に知らせるためのテールランプや、車両の走行状態等を後方に報知するブレーキランプや方向指示器、あるいはこれらが一体化されたコンビネーションランプ等が考えられる。
本発明において、昇降経路は、梯子等の専用部材によって構成されるものであってもよいし、架装物や車台の一部によって構成されるものであってもよく、さらには、架装物や車台の一部と、梯子等の専用部材との双方によって構成されるものでもよい。いずれにしても、本発明の昇降経路は、架装物に昇降するための踏み面として機能するものを有するものであって、車両が接地する接地面(路面)からの高さを異にする複数段の踏み面を備えていれば、各踏み面が階段状に配置されていてもよいし、梯子状に垂直方向に配置されていてもよい。
【0008】
上記の構成を前提として、請求項1に記載の発明は、前記後方灯火手段が、前記昇降経路上であって前記車台の後方から視認可能な通常位置と、該通常位置よりも後方灯火手段の一部または全部が前記昇降経路上から退避する退避位置との間を移動可能に設けられたことを特徴とする。
請求項1に記載の発明によれば、後方灯火手段は、通常位置において昇降経路上に位置する。昇降経路上というのは、架装物を昇降する際に足元や頭上等において昇降者の妨げとなる範囲を広く含むものであり、例えば、連続する2つの踏み面を結ぶ線分の上方が該当する。また、退避位置というのは、通常位置に比べて上記の昇降経路上から後方灯火手段の一部または全部が退避した位置をいうものであり、通常位置にあるときに比べて、後方灯火手段による昇降者の妨げが小さくなる位置をいう。
また、請求項1に記載の発明において、後方灯火手段は、通常位置と退避位置との間を移動可能であればよく、何らかの駆動装置によって両位置を機械的に移動するものであってもよいし、手動で移動させるものであってもよい。また、通常位置および退避位置の配置や、これら両位置を移動する態様も特に限定されることはなく、車両の幅方向や前後方向にスライドするものであってもよいし、あるいは回転するようにして両位置を移動するものであってもよい。
【0009】
請求項2に記載の発明は、前記車台には作業床を昇降させる昇降装置が架装されたことを特徴とする。
昇降装置には、例えば旋回台やブーム、あるいはこれらを旋回させたり伸縮させたりするための動力源や操作手段等が広く含まれるが、少なくとも作業床を昇降させるものであれば、旋回機能は必ずしも必須ではなく、ブームの起伏機能または伸縮機能のいずれかのみを有するものであってもよい。
【0010】
請求項3に記載の発明は、車両が走行状態または走行可能状態にあることを検出する走行可否検出手段と、前記後方灯火手段の位置を検出する位置検出手段と、前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出され、かつ、前記位置検出手段によって前記後方灯火手段が通常位置にないことが検出されたとき、前記後方灯火手段が通常位置にないことを報知する報知手段と、を備えたことを特徴とする。
請求項3に記載の発明において、走行可否検出手段は、車両が走行状態または走行可能状態にあることを検出するものであれば、その具体的な構成や検出方法等は特に限定されない。例えば、車両が走行状態にあることを検出する方法としては、走行用の操作手段(シフトレバー等)の操作状態や速度計等が考えられる。このとき、走行可否検出手段は、走行状態または走行可能状態にあることを検出するものであればよいので、例えば、走行状態または走行可能状態であることを検出する構成としてもよいし、これとは逆に、停止状態または走行不可能状態であることを検出する構成としてもよい。走行可否検出手段が、停止状態または走行不可能状態であることを検出する構成とした場合には、当該走行可否検出手段が検出信号を発しないことをもって、車両の走行状態または走行可能状態と判断すればよい。
【0011】
請求項3に記載の発明において、位置検出手段は、後方灯火手段の位置を検出するものであれば、その具体的な構成や検出方法等は特に限定されない。例えば、位置検出手段としては、圧力センサ、光センサ、磁気センサ等が考えられる。また、位置検出手段は、後方灯火手段が少なくとも通常位置にないことを検出するものであればよい。例えば、位置検出手段は、後方灯火手段が退避位置にあることを検出するものとしてもよく、この場合には、退避位置にあることの検出信号をもって、後方灯火手段が通常位置にないと判断することができる。
請求項3に記載の発明において、報知手段の構成や報知の方法は特に限定されない。例えば、報知手段を照明装置とした場合には、所定の態様で照明装置を点灯または点滅させることで報知を行うようにしてもよいし、報知手段を音声出力装置とした場合には、所定の音声を出力することで報知を行うようにしてもよい。また、報知手段を表示装置として、後方灯火手段が通常位置にないことをメッセージとして表示するようにしても構わない。
【0012】
請求項4に記載の発明は、車両が走行状態または走行可能状態にあるか否かを検出する走行可否検出手段と、前記後方灯火手段の前記通常位置から退避位置への移動を規制するための退避規制装置を制御する退避規制手段と、を備え、前記退避規制手段は、前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されている場合には、前記後方灯火手段の移動を規制するとともに、車両の走行状態または走行可能状態であることが検出されていない場合には、前記後方灯火手段の移動を許容するように前記退避規制装置を制御することを特徴とする。
請求項4に記載の発明において、走行可否検出手段は、上記請求項3に記載の発明と同様に、車両が走行状態または走行可能状態にあることを検出するものであれば、その具体的な構成や検出方法等は特に限定されない。
請求項4に記載の発明において、退避規制手段は、後方灯火手段の通常位置から退避位置への移動を規制したり許容したりするものでればよく、その具体的な構成は特に限定されない。
【0013】
請求項5に記載の発明は、車両が走行状態または走行可能状態にあるか否かを検出する走行可否検出手段と、前記後方灯火手段に対して、少なくとも前記退避位置から通常位置へ復帰させる駆動力を付与するための駆動装置を制御する駆動制御手段と、を備え、前記駆動制御手段は、前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されたとき、前記駆動装置を駆動して前記後方灯火手段を通常位置へ復帰させることを特徴とする。
請求項5に記載の発明において、走行可否検出手段は、上記請求項3または4に記載の発明と同様に、車両が走行状態または走行可能状態にあることを検出するものであれば、その具体的な構成や検出方法等は特に限定されない。
請求項5に記載の発明における駆動装置としては、例えば油圧モータ、電気モータ、ソレノイド、スプリング等の付勢手段、さらにはこれらの組み合わせ等が考えられる。例えば、後方灯火手段を通常位置に位置させるように、スプリングの付勢力を常時作用させておく。また、車両の走行状態または走行可能状態であることが検出されていないときには、所定のロック部材によって、後方灯火部材が退避位置に位置するようにロックしておく。そして、走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されたときに、ロック部材のロックを解除することで、後方灯火手段がスプリングの付勢力によって通常位置に移動するようにしてもよい。この場合には、ロック部材を作動する装置やスプリング等が駆動装置となり、当該駆動装置を制御するためにコントローラによって実行される処理が駆動制御手段となる。
【0014】
請求項6に記載の発明は、アウトリガ操作手段による張り出し操作に基づいて前記車台の幅方向に張り出したアウトリガフロートを接地面に接地させ、前記アウトリガ操作手段による格納操作に基づいて前記アウトリガフロートの接地を解除するアウトリガジャッキ装置を備え、前記駆動制御手段は、前記アウトリガ操作手段による格納操作に基づいて、前記駆動装置を駆動して前記後方灯火手段を通常位置へ復帰させることを特徴とする。
請求項7に記載の発明は、前記駆動装置が、前記後方灯火手段を前記通常位置から退避位置へ移動させる駆動力を付与するとともに、前記駆動制御手段は、前記アウトリガ操作手段による張り出し操作に基づいて、前記駆動装置を駆動して前記後方灯火手段を退避位置へ移動させることを特徴とする。
【発明の効果】
【0015】
請求項1〜7に記載の発明によれば、後方灯火手段を通常位置に位置させることにより後方からの視認性が確保されるとともに、作業者が架装物等を昇降する場合には、後方灯火手段を退避位置に退避させることにより昇降経路を確保することができる。したがって、車両の走行中等における後方灯火手段の視認性の確保と、作業中等における安全かつ容易な昇降といった昇降性の確保とを両立することができる。
また、架装物の形状や配置等が変更された場合であっても、まず昇降経路を確保するとともに、当該昇降経路上において視認性が確保できる位置に後方灯火手段を配置することができるので、設計変更等に関わらず視認性と昇降性とを容易に確保することができる。
【0016】
特に請求項2に記載の発明によれば、作業者は高頻度で車台を昇降するため、昇降性の向上によって、作業効率と安全面との一層の向上がもたらされる。
特に請求項3に記載の発明によれば、車両を走行しようとしたときや車両の走行中において、後方灯火手段が通常位置にない場合に報知手段による報知が行われるので、後方灯火手段を視認しにくい状態で走行してしまうのを防ぐことができ、走行中における後方灯火手段の視認性を常に確保することができる。
特に請求項4に記載の発明によれば、車両の走行中に、後方灯火手段が視認しにくい状態に移動してしまうのを防ぐことができ、走行中における後方灯火手段の視認性を常に確保することができる。
特に請求項5に記載の発明によれば、車両を走行しようとしたときや車両の走行中において、後方灯火手段が通常位置に強制的に復帰するので、後方灯火手段を視認しにくい状態で走行してしまうのを防ぐことができ、走行中における後方灯火手段の視認性を常に確保することができる。
特に請求項6に記載の発明によれば、アウトリガ操作手段による格納操作に基づいて、後方灯火手段を通常位置へ復帰させるので、作業の終了とともに後方灯火手段が通常位置へ復帰することとなり、後方灯火手段を視認しにくい状態で走行してしまうのを防ぐことができ、走行中における後方灯火手段の視認性を常に確保することができる。
特に請求項7に記載の発明によれば、アウトリガ操作手段による張り出し操作に基づいて、後方灯火手段を退避位置へ移動させるので、車両が安定支持される状態になってから作業者を架装物に昇らせることができる。言い換えれば、車両が安定支持されない状態では、昇降経路上に後方灯火手段を位置させて作業者の昇降を妨げることができ、これによって作業者が架装物に昇る際の安全を確保することができる。
【図面の簡単な説明】
【0017】
【図1】第1実施形態の高所作業車を斜め後方から見た斜視図である。
【図2】図1の部分拡大図である。
【図3】リヤコンビランプの位置関係を説明する図である。
【図4】走行状態または走行可能状態にある高所作業車の後方部分拡大図であり、(a)は上面図、(b)は左側側面図、(c)は背面図である。
【図5】停止状態または作業状態にある高所作業車の後方部分拡大図であり、(a)は上面図、(b)は左側側面図、(c)は背面図である。
【図6】コントローラと各種装置との接続関係を説明するブロック図である。
【図7】第1実施形態における報知装置制御処理を示すフローチャートである。
【図8】第2実施形態における報知装置制御処理を示すフローチャートである。
【図9】第3実施形態における報知装置制御処理を示すフローチャートである。
【図10】第4実施形態における報知装置制御処理を示すフローチャートである。
【図11】第5実施形態における規制装置制御処理であって、リヤコンビランプをロックする際の処理を示すフローチャートである。
【図12】第5実施形態における規制装置制御処理であって、リヤコンビランプのロックを解除する際の処理を示すフローチャートである。
【図13】第6実施形態における規制装置制御処理であって、リヤコンビランプのロックを解除する際の処理を示すフローチャートである。
【図14】第7実施形態における駆動装置制御処理を示すフローチャートである。
【図15】第8実施形態における駆動装置制御処理を示すフローチャートである。
【図16】第9実施形態における駆動装置制御処理を示すフローチャートである。
【発明を実施するための形態】
【0018】
図1〜図7を用いて、本発明の第1実施形態について説明する。なお、本発明は、車台に架装物が架装された作業用車両に広く適用可能であるが、ここでは本発明を高所作業車に適用した場合について説明する。
図1は、第1実施形態の高所作業車を斜め後方から見た斜視図である。高所作業車1は、車台2(ボディ)に前輪3F,3Fおよび後輪3R,3Rを有しており、前輪3F,3Fの上方には、高所作業車1の走行操作および作業操作を行うためのキャブ4が設けられている。このキャブ4の後方には、主に以下の架装物が架装されている。
すなわち、車台2の後端近傍には、不図示の油圧ポンプから吐出される作動油によってブーム5を旋回させる旋回装置6が設けられている。ブーム5は多段式に構成されており、その先端(トップブーム)には、本発明の作業床であるバケット7が常に水平を維持するように回動自在に取り付けられている。また、ブーム5には起伏シリンダ8が接続されており、この起伏シリンダ8を伸縮させることで、ブーム5が起伏するようにしている。つまり、バケット7は、ブーム5の伸縮と起伏シリンダ8の伸縮とによって高さ方向の位置を調節することができ、また、旋回装置6によって水平方向の位置を調節することができる。
なお、ブーム5、起伏シリンダ8およびこれらに作動油を供給する油圧ポンプによって本発明の昇降装置を構成している。
【0019】
また、車台2には、アウトリガジャッキ装置9,10が架装されている。アウトリガジャッキ装置9はキャブ4および前輪3F,3Fの近傍に設けられ、アウトリガジャッキ装置10は車台2の後端に設けられている。アウトリガジャッキ装置9,10は、いずれも同一の構成であるため、ここではアウトリガジャッキ装置10について説明する。
アウトリガジャッキ装置10は、一対のインナーボックス10b,10cが格納されたアウターボックス10aを、車台2の幅方向に沿って延設させている。インナーボックス10b,10cは、車台2の前後方向にずらして並列に配置されており、インナーボックス10bは車台2の前方側(高所作業車1の前進方向x側)に、インナーボックス10cは車台2の後方側(高所作業車1の後進方向y側)に配置されている。これら両インナーボックス10b,10cには、不図示のスライドシリンダがそれぞれ接続されており、このスライドシリンダの伸長動作によって、インナーボックス10bは車台2の左側(高所作業車1の前進方向xに向かって左側)に張り出し、インナーボックス10cは車台2の右側(高所作業車1の前進方向xに向かって右側)に張り出すこととなる。
そして、インナーボックス10b,10cの先端には、鉛垂方向(接地面に対して垂直方向)に伸縮自在なアウトリガ11b,11cがそれぞれ固定されている。アウトリガ11b,11cの下端には、それぞれアウトリガフロート12が設けられており、不図示のジャッキシリンダによってアウトリガ11b,11cを伸長させることにより、アウトリガフロート12が接地面に圧接して車両を安定支持することができる。
【0020】
また、車台2上には、作業用の工具等を収納するための工具箱13〜15が、車台2の長手方向に沿って配列されている。工具箱13は、車台2の後端から、図中符号S1で示すスペース分の間隔をもって配置されており、この工具箱13の前方(高所作業車1の前進方向x)に隣接するようにして工具箱14が配置されている。この工具箱14は、工具箱13よりも高さ方向に長く形成されており、工具箱13,14の間に段差が生じるようにしている。また、工具箱15は、工具箱14の上面14a上に固定されているが、このとき、工具箱14の上面14aが露出するように、工具箱15を工具箱14の後端から前方にずらして配置している。
したがって、車台2の後端から前方に向かって、スペースS1、工具箱13の上面13a、工具箱14の上面14a、工具箱15の上面15a、工具箱15に隣接するステップ16の順に階段状に高くなっていくこととなるが、このような構成としたのは、作業者がバケット7に乗り込むための昇降経路を確保するためである。つまり、図示のとおり、作業者が乗り込むバケット7は、格納状態においてキャブ4の上方に位置しているので、このバケット7に作業者が乗り込むためには昇降経路が必要となる。第1実施形態のように、工具箱13〜15によって昇降経路を階段状に設けることにより、車台2上からバケット7までの昇降を容易かつ安全なものとすることができる。
【0021】
また、通常、高所作業車1のような作業用車両においては、車台2に架装される架装物の重量に耐えられるように、車輪3F、3Rの直径を大きくしているため、接地面と車台2との間を昇降する際にも、上記と同様に昇降経路が必要となる。第1実施形態においては、接地面から車台2上までの昇降経路を、工具箱13の後方に設けることにより、接地面から工具箱15の上面15aまで一直線に昇降経路を形成し、接地面とバケット7との間を昇降する作業者の動線を短くして、昇降性を向上するようにしている。
なお、車台2の後端には、高所作業車1の後方から視認可能なように、ブレーキランプ、バックランプ、方向指示器を一体化したリヤコンビランプ17L,17R(リヤコンビネーションランプ)が設けられているが、第1実施形態においては、接地面から車台2上までの間の昇降を安全かつ容易に行えるように、リヤコンビランプ17Lを次のような構成にしている。
【0022】
図2は、高所作業車1の左側後端を部分的に拡大した斜視図であり、図3は、リヤコンビランプ17Lの位置関係を説明するための図である。また、図4は、走行状態または走行可能状態における高所作業車1の後方部分拡大図であり、図4(a)は高所作業車1の上面図、図4(b)は高所作業車1の左側側面図、図4(c)は高所作業車1を後方から見た背面図である。
図2、図3に示すように、アウトリガ11bは、車台2に形成されたスペースS1に隣接して設けられており、このスペースS1の真下すなわち車台2とアウターボックス10aとの間の空間には、ステッピングモータからなる駆動モータMが設けられている。この駆動モータMの回転動力は、不図示の減速機を介して駆動モータMの出力軸に接続されたモータ回転軸18によって取り出される。このモータ回転軸18は、高所作業車1の後進方向yに突出した後、上方に90度屈曲してから、さらに車台2の幅方向に90度屈曲しており、その先端にリヤコンビランプ17Lが固定されている。そして、高所作業車1の走行状態または走行可能状態においては、図示のとおり、リヤコンビランプ17Lが車台2や接地面と水平を維持した通常位置に静止している。この通常位置においては、リヤコンビランプ17Lが、アウトリガ11bよりも、高所作業車1の後進方向y側に突出している。したがって、リヤコンビランプ17Lは、高所作業車1の後方のいずれの角度からも良好な視認性が確保されることとなる。
なお、リヤコンビランプ17Lは、その通常位置において、アウターボックス10aの上方にあり、車台2の後端面に臨んでいる。
【0023】
そして、アウターボックス10aの下方には、当該アウターボックス10aの後端面よりもさらに高所作業車1の後進方向y側に突出するステップ19が設けられており、図3に示すように、ステップ19から車台2のスペースS1まで、階段状に本発明の昇降経路が形成されている。
より具体的には、ステップ19、アウターボックス10aの上面であってリヤコンビランプ17Lの下面に臨むスペースS2、車台2の後端近傍のスペースS1が、接地面と車台2との間を昇降する際の踏み面として機能することにより昇降経路が形成される。
しかしながら、図2〜図4に示すように、高所作業車1の走行状態または走行可能状態においては、リヤコンビランプ17LがスペースS2の上方に位置しており、昇降性が悪くなるばかりか、昇降の際にリヤコンビランプ17Lを破損させてしまう恐れがある。そこで、第1実施形態においては、作業者が接地面と車台2上との間を昇降する際に、駆動モータMを駆動してリヤコンビランプ17Lを昇降経路から退避させることで、安全かつ容易な昇降が可能となるようにしている。リヤコンビランプ17Lが昇降経路から退避した状態を図5に示す。
【0024】
図5は、図4と同様に高所作業車1の後方部分拡大図であり、図5(a)は高所作業車1の上面図、図5(b)は高所作業車1の左側側面図、図5(c)は高所作業車1を後方から見た背面図である。
この図からも明らかなように、駆動モータMを駆動すると、リヤコンビランプ17Lは図4に示す通常位置から図5に示す退避位置まで回転して静止する。この退避位置においては、リヤコンビランプ17Lは、格納状態にあるアウトリガ11bの後方に起立した状態となり、通常位置にあるリヤコンビランプ17Lによって被覆されていたアウターボックス10aの上面のスペースS2が露出する。したがって、このスペースS2が踏み面として機能するとともに、ステップ19、スペースS2、スペースS1によって、緩やかな段差を有する階段状の昇降通路が確保されることとなる。
以上のように、第1実施形態によれば、リヤコンビランプ17Lを通常位置に位置させることにより後方からの視認性が確保されるとともに、作業者が架装物等を昇降する場合には、リヤコンビランプ17Lを退避位置に退避させることにより昇降経路を確保することができる。したがって、車両の走行中等におけるリヤコンビランプ17Lの視認性の確保と、作業中等における安全かつ容易な昇降といった昇降性の確保とを両立することができる。
【0025】
なお、リヤコンビランプ17Lが退避位置にあると、両リヤコンビランプ17L,17Rが左右非対称となって後方からの視認性が悪化するとともに、リヤコンビランプ17Lの角度が変わってしまい、特に方向指示器による表示が不正確になってしまう。そのため、リヤコンビランプ17Lは、高所作業車1の走行中、必ず通常位置になければならない。そこで、第1実施形態においては、リヤコンビランプ17Lを通常位置に復帰させるのを忘れてしまい、リヤコンビランプ17Lが退避位置に移動したままの状態で高所作業車1を走行させてしまうことがないように、コントローラCが次のような制御を行っている。
【0026】
図6は、コントローラCの入力側(入力I/F)および出力側(出力I/F)に接続された各種装置を示すブロック図である。なお、図6においては、コントローラCに接続される種々の装置のうち特徴的なものを列記しているが、これら装置の中には、第1実施形態のコントローラCの制御においては不要なものも含まれている。
コントローラCの入力側には、パーキングブレーキON/OFF検出手段101、チェンジギヤ位置検出手段102、リヤコンビランプ位置検出手段103、退避規制装置の操作入力手段104、退避規制装置のロック状態検出手段105、アウトリガジャッキ装置操作入力手段106、アウトリガ状態検出手段107、PTO作動検出手段108、走行速度検出手段109が接続されている。
また、コントローラCの出力側には、駆動モータM、リヤコンビランプ17Lが通常位置から退避位置へ移動するのを規制する退避規制装置20(図3参照)、が接続されている。なお、スピーカやランプ等からなる報知装置121は、コントローラCの入力側および出力側の双方に接続されている。
【0027】
コントローラCは、CPU、ROM、RAMを備えており、入力側に接続された上記の各装置から信号が入力すると、CPUが入力信号を解析してROMに記憶された所定のプログラムを読み出し、入力信号によって検出された状態をRAMに記憶したり、出力側に接続された装置を制御したりする。
パーキングブレーキON/OFF検出手段101は、高所作業車1の移動を停止するためのパーキングブレーキ(制動装置)が停止制御状態にあるか(ONしているか)、解除状態にあるか(OFFしているか)を検出するものでる。このパーキングブレーキON/OFF検出手段101の構成は特に問わないが、例えば磁気センサやフォトセンサ等の位置検出センサ等によって、少なくとも、パーキングブレーキが停止制御状態から解除状態に、あるいは解除状態から停止制御状態に操作されたことを検出できればよい。
チェンジギヤ位置検出手段102は、変速ギヤの切り換え位置を検出するものである。第1実施形態においては、変速ギヤが切り換えられたことと、少なくとも変速ギヤの切り換え位置が動力の非伝達状態であるニュートラルにあることとを検出できれば、その構成は特に限定されない。
リヤコンビランプ位置検出手段103は、リヤコンビランプ17Lが通常位置から退避位置へ移動したり、退避位置から通常位置へ移動したりしたことを検出するものであり、例えば、磁気センサやフォトセンサ等の位置検出センサ等によって構成される。
【0028】
退避規制装置20は、リヤコンビランプ17Lの通常位置からの移動を規制するものであり、電磁ソレノイドによって構成されている。この退避規制装置20は、図3に示すように、リヤコンビランプ17Lに形成されたロック孔22に嵌合可能なロック部材21を備えている。そして、キャブ4内には、ロック孔22に嵌合しているロック部材21を、退避規制装置20内に没入させるように電流を励磁するためのボタン等からなる操作手段が設けられており、この操作手段の操作をコントローラCに入力するのが退避規制装置の操作入力手段104である。
退避規制装置のロック状態検出手段105は、例えば磁気センサやフォトセンサ等によって、上記のロック部材21が突出状態にあるのか没入状態にあるのかを検出するものである。
アウトリガジャッキ装置操作入力手段106は、キャブ4内に設けられた操作レバー等の操作信号をコントローラCに入力するものであり、アウトリガジャッキ装置9,10の張り出し操作、格納操作、ジャッキアップ操作のいずれの操作が行われたかをコントローラCに入力する。
アウトリガ状態検出手段107は、例えば磁気センサやフォトセンサ等の位置検出センサ等によって、上記のアウトリガジャッキ装置9,10が張り出し状態にあるのか格納状態にあるのかを検出するものである。
PTO(パワー・テイク・オフ)は、車両駆動用のエンジン動力を取り出して油圧ポンプを作動させるものであり、PTO作動検出手段108は、例えば油圧ポンプの作動状態からPTOが作動しているか否かを検出する。PTO作動検出手段108としては、例えば、油圧ポンプと架装物たるアクチュエータとを結ぶ油圧回路の圧力を検出するセンサが考えられる。
走行速度検出手段109は、高所作業車1の走行速度を検出してコントローラCに入力するものであるが、検出した走行速度を常時コントローラCに入力することとしてもよいし、所定速度以上を検出した場合にのみコントローラCに信号を入力することとしてもよい。
【0029】
コントローラCは、その入力側に接続された上記の各検出手段から信号が入力すると、当該入力信号に基づいて、RAMに現在の状態を記憶させるとともに、当該RAMに記憶している状態に応じた制御を行うこととなる。
例えば、高所作業車1を停止させてパーキングブレーキを停止制御状態に切り換え操作すると、パーキングブレーキON/OFF検出手段から、パーキングブレーキがOFFになったという信号がコントローラCに入力する。コントローラCのCPUは、入力した信号を解析してROMに格納された所定のプログラムを読み出し、パーキングブレーキがOFFになったことをRAMに記憶させる。このようにして、コントローラCは各種装置の状態を把握するとともに、RAMの記憶情報に基づいて図7に示す報知装置制御処理を行うこととなる。
【0030】
この図7に示す報知装置制御処理は、パーキングブレーキON/OFF検出手段101、チェンジギヤ位置検出手段102、リヤコンビランプ位置検出手段103のいずれかからコントローラCに信号が入力することによって実行される。
【0031】
(ステップS101)
上記検出手段101,102,103から信号が入力すると、CPUは、RAMの記憶情報からリヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS102に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合にはステップS105に処理を移す。
【0032】
(ステップS102)
上記ステップS101において、リヤコンビランプ17Lは通常位置にはない(退避位置にある)と判定した場合には、CPUは、RAMの記憶情報からパーキングブレーキがONしているか(停止制御状態であるか)否かを判定する。その結果、パーキングブレーキはONしていない(OFFである)と判定した場合には、ステップS103に処理を移し、パーキングブレーキがONしていると判定した場合には、ステップS105に処理を移す。
【0033】
(ステップS103)
上記ステップS102において、パーキングブレーキはONしていないと判定した場合には、CPUは、RAMの記憶情報からチェンジギヤはニュートラルであるか否かを判定する。その結果、チェンジギヤはニュートラルではないと判定した場合には、ステップS104に処理を移し、チェンジギヤはニュートラルであると判定した場合には、ステップS105に処理を移す。
【0034】
(ステップS104)
このステップS104の処理は、リヤコンビランプ17Lが通常位置ではなく(退避位置である)、パーキングブレーキがOFFになっており、かつ、チェンジギヤがニュートラルではない場合に行われる。パーキングブレーキがOFFで、かつ、チェンジギヤがニュートラルでない場合というのは、高所作業車1が走行状態であるか、もしくは走行可能状態である場合である。このように、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置にない場合には、CPUは報知装置121を作動させて警報を行い、リヤコンビランプ17Lが通常位置にないことを報知する。具体的には、報知装置121をスピーカ等の音声出力装置で構成した場合には、「リヤコンビランプを通常位置に戻してください」というメッセージを再生したり、警報音を出力したりする。また、報知装置121をランプで構成した場合には、当該報知装置121を、キャブ4内の運転者から見やすい位置等において点灯、点滅させて警報を行う。
【0035】
(ステップS105)
一方、上記ステップS101において、リヤコンビランプ17Lが通常位置にあると判定した場合(ステップS101のYES)や、上記ステップS102またはステップS103のいずれかにおいて、高所作業車1が停止状態にあると判定した場合(ステップS102またはステップS103のYES)には、CPUは報知装置121が作動中であるか否かを判定する。その結果、報知装置121が作動中であると判定した場合には、ステップS106に処理を移し、報知装置121は作動中ではないと判定した場合には、当該報知装置制御処理を終了する。
なお、このステップS105において報知装置121が作動中であると判定するのは次の場合である。すなわち、この報知装置制御処理は、パーキングブレーキON/OFF検出信号、チェンジギヤ位置検出信号、リヤコンビランプ位置検出信号のいずれかがコントローラCに入力したことを契機に開始される。このとき、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置になかった場合には、ステップS104において報知装置121が作動する。この報知装置121の作動に気付いて、リヤコンビランプ17Lを通常位置に復帰させたり、あるいはパーキングブレーキをONする操作やチェンジギヤをニュートラルに切り換える操作によって高所作業車1を停止状態にしたりすると、コントローラCに再びリヤコンビランプ位置検出信号、パーキングブレーキON/OFF検出信号、チェンジギヤ位置検出信号のいずれかが入力する。すると、この信号の入力を契機として、コントローラCにおいて再び図7に示す報知装置制御処理が開始することとなる。この場合には、ステップS101、ステップS102、ステップS103のいずれかで「YES」と判定されてステップS105の処理が行われ、当該ステップS105において報知装置121が作動中であると判定される。
【0036】
(ステップS106)
上記ステップS105において、報知装置121が作動中であると判定した場合には、CPUは、報知装置121の作動を停止させる処理を行う。具体的には、報知装置121をスピーカ等の音声出力装置で構成した場合には、上記のメッセージや警報音の出力を停止する処理を行い、報知装置121をランプで構成した場合には、点灯、点滅している当該ランプを消灯させる処理を行う。
【0037】
以上のように、第1実施形態によれば、高所作業車1を走行しようとしたときや走行中において、リヤコンビランプ17Lが通常位置にない場合に報知装置121による報知が行われるので、リヤコンビランプ17Lが視認しにくい状態で走行してしまうのを防ぐことができる。
なお、第1実施形態においては、高所作業車1が走行状態または走行可能状態にあるか否かを、パーキングブレーキの操作状況とチェンジギヤの操作状況との双方に基づいて判断することとしている。つまり、パーキングブレーキON/OFF検出手段101およびチェンジギヤ位置検出手段102によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段を構成するようにしている。
ただし、高所作業車1が走行状態または走行可能状態にあるか否かの判断を、パーキングブレーキの操作状況のみに基づいて行ってもよいし、チェンジギヤの操作状況のみに基づいて行ってもよい。つまり、本発明の走行可否検出手段をパーキングブレーキON/OFF検出手段101のみで構成してもよいし、チェンジギヤ位置検出手段102のみで構成することとしてもよい。この場合には、コントローラCのROMに格納された図7の処理を実行するプログラムにおいて、ステップS102またはステップS103のいずれかの処理を省くようにすればよい。
【0038】
図8を用いて、本発明の第2実施形態について説明する。なお、この第2実施形態の高所作業車は、コントローラCのROMに格納された報知装置制御処理を実行するプログラムのみが上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第2実施形態の特徴的な構成である報知装置制御処理について説明する。
この第2実施形態においては、リヤコンビランプ位置検出手段103またはアウトリガ状態検出手段107からコントローラCに信号が入力することによって実行される。
【0039】
(ステップS201)
上記検出手段103,107から信号が入力すると、CPUは、RAMの記憶情報からアウトリガジャッキ装置9,10が格納状態にあるか否かを判定する。ここでは、アウトリガジャッキ装置9,10は一体的に制御されることとし、インナーボックス10b,10cがアウターボックス10aに完全に格納され、かつ、アウトリガ11b,11cがもっとも収縮している状態を格納状態とする。
アウトリガジャッキ装置9,10が格納状態であると判定した場合にはステップS202に処理を移し、アウトリガジャッキ装置9,10が格納状態ではないと判定した場合にはステップS204に処理を移す。
【0040】
(ステップS202)
上記ステップS201において、アウトリガジャッキ装置9,10が格納状態であると判定した場合には、CPUは、リヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS203に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合にはステップS204に処理を移す。
【0041】
(ステップS203)
このステップS203の処理は、アウトリガジャッキ装置9,10が格納状態であり、かつ、リヤコンビランプ17Lが通常位置ではない(退避位置である)場合に行われる。この第2実施形態においては、アウトリガジャッキ装置9,10の状態から、高所作業車1が走行状態または走行可能状態であると判断するようにしている。つまり、アウトリガジャッキ装置9,10が張り出していれば、高所作業車1は走行することができないが、アウトリガジャッキ装置9,10が格納されていれば高所作業車1は走行することができるので、アウトリガジャッキ装置9,10が格納状態であることをもって、高所作業車1の走行状態または走行可能状態と判断するのである。したがって、第2実施形態においては、アウトリガ状態検出手段107によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されることとなる。
上記のように、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置にない場合には、CPUは報知装置121を作動させて警報を行い、リヤコンビランプ17Lが通常位置にないことを報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0042】
(ステップS204)
一方、上記ステップS201において、アウトリガジャッキ装置9,10が格納状態ではない(張り出し状態である)と判定した場合(ステップS201のNO)や、上記ステップS202において、リヤコンビランプ17Lが通常位置にあると判定した場合(ステップS202のYES)には、CPUは報知装置121が作動中であるか否かを判定する。その結果、報知装置121が作動中であると判定した場合には、ステップS205に処理を移し、報知装置121は作動中ではないと判定した場合には、当該報知装置制御処理を終了する。
なお、このステップS204において報知装置121が作動中であると判定するのは次の場合である。すなわち、この報知装置制御処理は、リヤコンビランプ位置検出信号またはアウトリガ状態検出信号がコントローラCに入力したことを契機に開始される。このとき、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置になかった場合には、ステップS203において報知装置121が作動する。この報知装置121の作動に気付いて、リヤコンビランプ17Lを通常位置に復帰させたり、あるいはアウトリガジャッキ装置9,10を張り出す操作を行ったりすると、コントローラCに再びリヤコンビランプ位置検出信号またはアウトリガ状態検出信号が入力する。すると、この信号の入力を契機として、コントローラCにおいて再び図8に示す報知装置制御処理が開始することとなる。この場合には、ステップS201で「NO」と判定されるか、ステップS202で「YES」と判定されて、ステップS204の処理が行われ、当該ステップS204において報知装置121が作動中であると判定される。
【0043】
(ステップS205)
上記ステップS204において、報知装置121が作動中であると判定した場合には、CPUは、報知装置121の作動を停止させる処理を行う。なお、この停止処理も上記第1実施形態と同様であるので詳細な説明は省略する。
【0044】
以上のように、この第2実施形態においても、上記第1実施形態と同様に、高所作業車1を走行しようとしたときや走行中において、リヤコンビランプ17Lが通常位置にない場合に報知装置121による報知が行われるので、リヤコンビランプ17Lが視認しにくい状態で走行してしまうのを防ぐことができる。
なお、第2実施形態においては、アウトリガ状態検出手段を、インナーボックス10b,10cやアウトリガ11b,11c等の位置を検出するセンサによって構成したが、アウトリガ状態検出手段を、例えば、アウトリガ11やアウトリガフロート12の圧力を検知する圧力センサによって構成してもよい。いずれにしても、アウトリガジャッキ装置9,10の状態を検出することができれば、その構成は特にどのようなものであっても構わない。
また、第2実施形態においては、アウトリガジャッキ装置9,10が完全に格納された状態を高所作業車1の走行状態または走行可能状態と判断するようにしたが、アウトリガフロート12が接地面から離れていれば、理論上、走行が可能となる。したがって、アウトリガフロート12が接地面から離れた状態を高所作業車1の走行状態または走行可能状態と判断するようにしてもよく、この場合には、アウトリガ状態検出手段がアウトリガフロート12と接地面との接地状態を検出するものであればよい。
【0045】
図9を用いて、本発明の第3実施形態について説明する。なお、この第3実施形態の高所作業車は、コントローラCのROMに格納された報知装置制御処理を実行するプログラムのみが上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第3実施形態の特徴的な構成である報知装置制御処理について説明する。
この第3実施形態においては、リヤコンビランプ位置検出手段103またはPTO作動検出手段108からコントローラCに信号が入力することによって実行される。なお、PTO作動検出手段108は、油圧ポンプが作動したときにコントローラCに作動開始信号を入力し、油圧ポンプの作動が停止したときにコントローラCに作動停止信号を入力する。コントローラCにおいては、作動開始信号の入力に基づいてRAMにフラグをONするとともに、作動停止信号の入力に基づいてRAMにONされているフラグをOFFするようにしている。
【0046】
(ステップS301)
上記検出手段103,108から信号が入力すると、CPUは、RAMにフラグがONしているか否かを判断して、PTO(油圧ポンプ)が作動しているか否かを判定する。その結果、PTO(油圧ポンプ)が作動していないと判定した場合にはステップS301に処理を移し、PTO(油圧ポンプ)が作動していると判定した場合にはステップS304に処理を移す。
【0047】
(ステップS302)
上記ステップS301において、PTO(油圧ポンプ)は作動していないと判定した場合には、CPUは、リヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS303に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合にはステップS304に処理を移す。
【0048】
(ステップS303)
このステップS303の処理は、PTO(油圧ポンプ)が作動を停止しており、かつ、リヤコンビランプ17Lが通常位置ではない(退避位置である)場合に行われる。この第3実施形態においては、PTO(油圧ポンプ)の作動状態から、高所作業車1が走行状態または走行可能状態であると判断するようにしている。つまり、PTO(油圧ポンプ)が作動していれば、高所作業車1の作業中または作業待機中とみなすことができるので、この場合には高所作業車1は走行することができないと判断し、PTO(油圧ポンプ)が作動していなければ、高所作業車1の作業は行われていないとみなすことができるので、この場合には高所作業車1の走行状態または走行可能状態と判断するのである。したがって、第3実施形態においては、PTO作動検出手段によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されることとなる。
上記のように、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置にない場合には、CPUは報知装置121を作動させて警報を行い、リヤコンビランプ17Lが通常位置にないことを報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0049】
(ステップS304)
一方、上記ステップS301において、PTO(油圧ポンプ)は作動中であると判定した場合(ステップS301のYES)や、上記ステップS302において、リヤコンビランプ17Lが通常位置にあると判定した場合(ステップS302のYES)には、CPUは報知装置121が作動中であるか否かを判定する。その結果、報知装置121が作動中であると判定した場合には、ステップS305に処理を移し、報知装置121は作動中ではないと判定した場合には、当該報知装置制御処理を終了する。
なお、このステップS304において報知装置121が作動中であると判定するのは次の場合である。すなわち、この報知装置制御処理は、リヤコンビランプ位置検出信号またはPTO作動検出信号がコントローラCに入力したことを契機に開始される。このとき、PTO(油圧ポンプ)が作動停止状態であるにも関わらず、言い換えれば、高所作業車1が走行状態または走行可能状態であるにも関わらず、リヤコンビランプ17Lが通常位置になかった場合には、ステップS303において報知装置121が作動する。この報知装置121の作動中に、リヤコンビランプ17Lを通常位置に復帰させたり、あるいはPTO(油圧ポンプ)を作動させたりすると、コントローラCに再びリヤコンビランプ位置検出信号またはPTO作動検出信号が入力する。すると、この信号の入力を契機として、コントローラCにおいて再び図9に示す報知装置制御処理が開始することとなる。この場合には、ステップS301で「YES」と判定されるか、ステップS302で「YES」と判定されて、ステップS304の処理が行われ、当該ステップS304において報知装置121が作動中であると判定される。
【0050】
(ステップS305)
上記ステップS304において、報知装置121が作動中であると判定した場合には、CPUは、報知装置121の作動を停止させる処理を行う。なお、この停止処理も上記第1実施形態と同様であるので詳細な説明は省略する。
【0051】
以上のように、この第3実施形態においても、上記第1実施形態と同様に、高所作業車1を走行しようとしたときや走行中において、リヤコンビランプ17Lが通常位置にない場合に報知装置121による報知が行われるので、リヤコンビランプ17Lが視認しにくい状態で走行してしまうのを防ぐことができる。
【0052】
図10を用いて、本発明の第4実施形態について説明する。なお、この第4実施形態の高所作業車は、コントローラCのROMに格納された報知装置制御処理を実行するプログラムのみが上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第4実施形態の特徴的な構成である報知装置制御処理について説明する。
この第4実施形態においては、リヤコンビランプ位置検出手段103または走行速度検出手段109からコントローラCに信号が入力することによって実行される。なお、走行速度検出手段109は、高所作業車1の走行速度を検出する速度計を備えており、この速度計が計測する速度を示す速度検出信号が常時コントローラCに入力するようにしている。
【0053】
(ステップS401)
上記検出手段103,109から信号が入力すると、CPUは、入力した速度検出信号を解析し、予め設定した速度を超過しているか否かを判定する。その結果、予め設定した速度を超過していると判定した場合にはステップS402に処理を移し、予め設定した速度を超過していないと判定した場合にはステップS404に処理を移す。
【0054】
(ステップS402)
上記ステップS401において、所定速度を超過していると判定した場合には、CPUは、リヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS403に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合にはステップS404に処理を移す。
【0055】
(ステップS403)
このステップS403の処理は、高所作業車1の走行速度が予め設定された速度を超過しており、かつ、リヤコンビランプ17Lが通常位置ではない(退避位置である)場合に行われる。つまり、第4実施形態においては、走行速度検出手段109によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されている。
上記のように、リヤコンビランプ17Lが通常位置にないまま、高所作業車1が所定の速度を超過して走行している場合には、CPUは、報知装置121を作動させて警報を行い、リヤコンビランプ17Lが通常位置にないことを報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0056】
(ステップS404)
一方、上記ステップS401において、予め設定した速度を超過していないと判定した場合(ステップS401のNO)や、上記ステップS402において、リヤコンビランプ17Lが通常位置にあると判定した場合(ステップS402のYES)には、CPUは報知装置121が作動中であるか否かを判定する。その結果、報知装置121が作動中であると判定した場合には、ステップS405に処理を移し、報知装置121は作動中ではないと判定した場合には、当該報知装置制御処理を終了する。
なお、このステップS404において報知装置121が作動中であると判定するのは次のような場合である。例えば、リヤコンビランプ17Lが通常位置にない状態で高所作業車1を走行させるとともに、その走行速度が予め設定した速度を超過すると、ステップS403において報知装置121が作動する。この報知装置121の作動中に、リヤコンビランプ17Lを通常位置に復帰させたり、あるいは予め設定した速度まで減速させたりすると、ステップS401で「NO」と判定されるか、ステップS402で「YES」と判定されて、ステップS404の処理が行われ、当該ステップS404において報知装置121が作動中であると判定される。
【0057】
(ステップS405)
上記ステップS404において、報知装置121が作動中であると判定した場合には、CPUは、報知装置121の作動を停止させる処理を行う。なお、この停止処理も上記第1実施形態と同様であるので詳細な説明は省略する。
【0058】
以上のように、この第4実施形態によれば、リヤコンビランプ17Lが通常位置にない状態で高所作業車1を走行させると、報知装置121による報知が行われるので、リヤコンビランプ17Lが視認しにくい状態で走行してしまうのを防ぐことができる。
【0059】
図11、図12を用いて、本発明の第5実施形態について説明する。なお、この第5実施形態の高所作業車は、上記第1実施形態の高所作業車において、コントローラCのROMに規制装置制御処理を実行するプログラムがさらに格納された点のみ上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第5実施形態の特徴的な構成である規制装置制御処理について説明する。
この規制装置制御処理は、高所作業車1の走行中に、振動や衝撃等の何らかの理由によって、リヤコンビランプ17Lが通常位置から退避位置へ移動してしまうのを防ぐために行われる。リヤコンビランプ17Lの通常位置から退避位置への移動は、図3に示すように、退避規制装置20のロック部材21が、リヤコンビランプ17Lに形成されたロック孔22に嵌合することによって規制される。
なお、この第5実施形態の規制装置制御処理は、走行状態または走行可能状態となったときに、リヤコンビランプ17Lの通常位置からの移動を自動的に規制するとともに、走行停止状態において、退避規制装置の操作入力手段104から解除信号が入力することによって、上記の規制を解除するものである。
【0060】
図11に示す規制装置制御処理は、パーキングブレーキON/OFF検出手段101またはチェンジギヤ位置検出手段102からコントローラCに信号が入力することによって実行される。
【0061】
(ステップS501)
上記検出手段101,102から信号が入力すると、CPUは、RAMの記憶情報からパーキングブレーキがONしているか(停止制御状態であるか)否かを判定する。その結果、パーキングブレーキはONしていない(OFFである)と判定した場合には、ステップS502に処理を移し、パーキングブレーキがONしていると判定した場合には、当該規制装置制御処理を終了する。
【0062】
(ステップS502)
上記ステップS501において、パーキングブレーキはONしていないと判定した場合には、CPUは、RAMの記憶情報からチェンジギヤはニュートラルであるか否かを判定する。その結果、チェンジギヤはニュートラルではないと判定した場合には、ステップS503に処理を移し、チェンジギヤはニュートラルであると判定した場合には、当該規制装置制御処理を終了する。
【0063】
(ステップS503)
上記ステップS502において、チェンジギヤはニュートラルではないと判定した場合には、CPUは、退避規制装置20に電流を励磁してロック部材21を突出させる。
つまり、このステップS503の処理が行われる場合というのは、パーキングブレーキがOFFとなっており、しかも、チェンジギヤがニュートラルではない場合である。CPUは、こうした状態を高所作業車1の走行状態または走行可能状態と判断し、自動的に退避規制装置20によってリヤコンビランプ17Lを通常位置に規制することとなる。
【0064】
(ステップS504)
次に、CPUは、退避規制装置のロック状態検出手段105から、ロック部材21が突出状態となったか否かの信号が入力したか否かを判定する。なお、上記ステップS503において退避規制装置20に電流が励磁されてから、実際にロック部材21が正規に突出するまでの間には多少のタイムラグが生じる。したがって、厳密にいえば、CPUは、上記ステップS503の処理が行われるのと同時に、例えば1秒等の所定の時間をタイマカウンタにセットするとともに、この時間が経過するまでステップS504の処理をループさせる。
そして、所定の時間が経過してもロック部材21が正規の突出状態とならなかった場合には、ステップS505に処理を移し、所定の時間内にロック部材21が正規の突出状態となった場合には、当該規制装置制御処理を終了する。
【0065】
(ステップS505)
上記ステップS504において、ロック部材21が正規の突出状態にならないと判定した場合には、CPUは、報知装置121を作動して、リヤコンビランプ17Lがロックされていない旨を所定時間報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0066】
また、この第5実施形態においては、キャブ4に設けられたボタン等からなる操作手段を操作することにより、退避規制装置の操作入力手段104からコントローラCにロック解除操作信号が入力し、リヤコンビランプ17Lの通常位置から退避位置への移動が許容される。言い換えれば、操作手段を操作することで、リヤコンビランプ17Lのロックを解除するようにしているが、コントローラCにロック解除操作信号が入力することによって、図12に示す規制装置制御処理が実行される。
【0067】
(ステップS601)
上記退避規制装置の操作入力手段104からロック解除操作信号が入力すると、CPUは、RAMの記憶情報からパーキングブレーキがONしているか(停止制御状態であるか)否かを判定する。その結果、パーキングブレーキはONしていない(OFFである)と判定した場合には、ステップS602に処理を移し、パーキングブレーキがONしていると判定した場合には、ステップS603に処理を移す。
【0068】
(ステップS602)
上記ステップS601において、パーキングブレーキはONしていないと判定した場合には、CPUは、RAMの記憶情報からチェンジギヤはニュートラルであるか否かを判定する。その結果、チェンジギヤはニュートラルであると判定した場合には、ステップS603に処理を移し、チェンジギヤはニュートラルではないと判定した場合には、ステップS604に処理を移す。
【0069】
(ステップS603)
上記ステップS601においてパーキングブレーキがONしていると判定した場合、あるいは上記ステップS602においてチェンジギヤがニュートラルであると判定した場合には、CPUは、退避規制装置20の電流を励磁して、ロック部材21を没入状態となるように作動させる。
つまり、このステップS603の処理が行われる場合というのは、パーキングブレーキがONとなっているか、チェンジギヤがニュートラルである場合である。CPUは、こうした状態から、高所作業車1が走行状態または走行可能状態ではないと判断し、リヤコンビランプ17Lのロックを解除することとなる。
【0070】
(ステップS604)
一方、上記ステップS603において、チェンジギヤはニュートラルではないと判定した場合には、CPUは、報知装置121を作動して、リヤコンビランプ17Lのロックを解除できない旨を所定時間報知する。なお、報知装置121の作動内容については上記第1実施形態と同様である。
【0071】
以上のように、この第5実施形態によれば、高所作業車1が走行状態または走行可能状態となったところで自動的にリヤコンビランプ17Lが通常位置にロックされるので、ロックをし忘れることがなく、走行中の振動や衝撃等によってリヤコンビランプ17Lが退避位置に移動してしまうことがない。また、走行状態または走行可能状態においては、ロックが解除されないようにしたので、人為的なミスが生じず、走行中におけるリヤコンビランプ17Lの視認性を常に確保することができる。
なお、第5実施形態においては、高所作業車1が走行状態または走行可能状態にあるか否かを、パーキングブレーキの操作状況とチェンジギヤの操作状況との双方に基づいて判断することとしている。つまり、パーキングブレーキON/OFF検出手段101およびチェンジギヤ位置検出手段102によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段を構成するようにしている。
ただし、高所作業車1が走行状態または走行可能状態にあるか否かの判断を、パーキングブレーキの操作状況のみに基づいて行ってもよいし、チェンジギヤの操作状況のみに基づいて行ってもよい。つまり、本発明の走行可否検出手段をパーキングブレーキON/OFF検出手段101のみで構成してもよいし、チェンジギヤ位置検出手段102のみで構成することとしてもよい。この場合には、コントローラCのROMに格納された図11または図12の処理を実行するプログラムにおいて、ステップS501およびステップS601、または、ステップS502およびステップS602のいずれかの処理を省くようにすればよい。
【0072】
図13を用いて、本発明の第6実施形態について説明する。なお、この第6実施形態の高所作業車は、コントローラCのROMに格納された規制装置制御処理を実行するプログラムのみが上記第5実施形態と異なり、その他の構成は全て上記第5実施形態と同じである。したがって、上記第5実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第6実施形態の特徴的な構成である規制装置制御処理について説明する。なお、この第6実施形態においても、図11に示す規制装置制御処理が実行され、図12に示す処理に代わって図13に示す処理が実行される。この図13に示す規制装置制御処理は、退避規制装置の操作入力手段104からコントローラCにロック解除操作信号が入力することによって実行される。
【0073】
(ステップS701)
退避規制装置の操作入力手段104から解除操作信号が入力すると、CPUは、走行速度検出手段から入力する高所作業車1の走行速度が予め設定された速度以下であるか否かを判定する。その結果、予め設定した速度以下であると判定した場合にはステップS702に処理を移し、予め設定した速度を超過していると判定した場合にはステップS703に処理を移す。
【0074】
(ステップS702)
上記ステップS701において、走行速度検出手段109から入力する高所作業車1の走行速度が、所定速度以下であると判定した場合には、CPUは、退避規制装置20の電流を励磁して、ロック部材21を没入状態となるように作動させる。
つまり、この第6実施形態においては、走行速度が所定速度以下であることをもって、高所作業車1の走行状態または走行可能状態ではないと判断し、リヤコンビランプ17Lのロックを解除することとなる。つまり、第6実施形態においては、走行速度検出手段109によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されている。
【0075】
(ステップS703)
一方、上記ステップS701において、走行速度検出手段109から入力する高所作業車1の走行速度が、所定速度以下ではないと判定した場合には、CPUは報知装置121を作動して、リヤコンビランプ17Lのロックを解除できない旨を所定時間報知する。なお、報知装置121の作動内容については上記第5実施形態と同様である。
以上のように、この第6実施形態においては、走行速度が所定速度以下であることに基づいて、高所作業車1が走行状態または走行可能状態でないと判断するようにしたが、この実施形態によっても上記第5実施形態と同様の効果を実現することができる。
【0076】
なお、上記第5,6実施形態においては、パーキングブレーキON/OFF検出手段101、チェンジギヤ位置検出手段102、走行速度検出手段109によって、車両が走行状態または走行可能状態にあることを検出することとしたが、上記第2,3実施形態と同様に、アウトリガ状態検出手段107またはPTO作動検出手段108によって、車両が走行状態または走行可能状態にあることを検出するようにしても構わない。つまり、規制装置制御処理には本発明の走行可否検出手段が必要となるが、車両が走行状態または走行可能状態であるか否かを判断することができれば、その構成は上記第5,6実施形態に限らない。
また、上記第5,6実施形態を、上記第1〜4実施形態と適宜組み合わせて、報知装置制御処理と規制装置制御処理とを行うようにしてもよいこと当然である。
【0077】
図14を用いて、本発明の第7実施形態について説明する。なお、この第7実施形態の高所作業車は、上記第1実施形態の高所作業車において、コントローラCのROMに駆動装置制御処理を実行するプログラムがさらに格納された点のみ上記第1実施形態と異なり、その他の構成は全て上記第1実施形態と同じである。したがって、第1実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第7実施形態の特徴的な構成である駆動装置制御処理について説明する。
この駆動装置制御処理は、走行状態または走行可能状態となったときに、リヤコンビランプ17Lを通常位置に復帰させるのを忘れて、リヤコンビランプ17Lが退避位置にあるまま走行してしまうのを防ぐためのものである。
【0078】
この図14に示す駆動装置制御処理は、パーキングブレーキON/OFF検出手段101またはチェンジギヤ位置検出手段102からコントローラCに信号が入力することによって実行される。
【0079】
(ステップS801)
上記検出手段101,102から信号が入力すると、CPUは、RAMの記憶情報からパーキングブレーキがONしているか(停止制御状態であるか)否かを判定する。その結果、パーキングブレーキはONしていない(OFFである)と判定した場合には、ステップS802に処理を移し、パーキングブレーキがONしていると判定した場合には、当該駆動装置制御処理を終了する。
【0080】
(ステップS802)
上記ステップS801において、パーキングブレーキはONしていないと判定した場合には、CPUは、RAMの記憶情報からチェンジギヤはニュートラルであるか否かを判定する。その結果、チェンジギヤはニュートラルではないと判定した場合には、ステップS803に処理を移し、チェンジギヤはニュートラルであると判定した場合には、当該駆動装置制御処理を終了する。
【0081】
(ステップS803)
このステップS803の処理は、パーキングブレーキがOFFになっており、かつ、チェンジギヤがニュートラルではない場合に行われる。パーキングブレーキがOFFで、かつ、チェンジギヤがニュートラルでない場合というのは、高所作業車1が走行状態であるか、もしくは走行可能状態である場合である。
このように、走行状態または走行可能状態となった場合には、CPUは、リヤコンビランプ17Lを通常位置に復帰させるように駆動モータMを駆動する。なお、この第7実施形態においては、駆動モータMをパルスモータで構成しており、リヤコンビランプ17Lが通常位置に到達したところで当該駆動モータMの駆動が停止することとなる。ただし、駆動モータMを油圧モータや他の電気モータで構成した場合には、リヤコンビランプ位置検出手段103から、当該リヤコンビランプ17Lが通常位置にあることを検出する信号が入力したことを契機として、モータの駆動を停止する制御を行うようにすればよい。
【0082】
以上のように、この第7実施形態によれば、高所作業車1が走行状態または走行可能状態となったときに、リヤコンビランプ17Lが自動で通常位置に復帰するので、リヤコンビランプ17Lを通常位置に復帰させるのを忘れてしまうといった人為的ミスを確実に防ぐことができる。
なお、第7実施形態においては、高所作業車1が走行状態または走行可能状態にあるか否かを、パーキングブレーキの操作状況とチェンジギヤの操作状況との双方に基づいて判断することとしている。つまり、パーキングブレーキON/OFF検出手段101およびチェンジギヤ位置検出手段102によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段を構成するようにしている。
ただし、高所作業車1が走行状態または走行可能状態にあるか否かの判断を、パーキングブレーキの操作状況のみに基づいて行ってもよいし、チェンジギヤの操作状況のみに基づいて行ってもよい。つまり、本発明の走行可否検出手段をパーキングブレーキON/OFF検出手段101のみで構成してもよいし、チェンジギヤ位置検出手段102のみで構成することとしてもよい。この場合には、コントローラCのROMに格納された図14の処理を実行するプログラムにおいて、ステップS801またはステップS802のいずれかの処理を省くようにすればよい。
【0083】
図15を用いて、本発明の第8実施形態について説明する。なお、この第8実施形態の高所作業車は、コントローラCのROMに格納された駆動装置制御処理を実行するプログラムのみが上記第7実施形態と異なり、その他の構成は全て上記第7実施形態と同じである。したがって、上記第7実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第8実施形態の特徴的な構成である駆動装置制御処理について説明する。
この第8実施形態においては、走行速度検出手段109からコントローラCに信号が入力することによって実行される。なお、走行速度検出手段109は、高所作業車1の走行速度を検出する速度計を備えており、この速度計が計測する速度を示す速度検出信号が常時コントローラCに入力するようにしている。
【0084】
(ステップS901)
走行速度検出手段109から信号が入力すると、CPUは、入力した速度検出信を解析し、予め設定した速度を超過しているか否かを判定する。その結果、予め設定した速度を超過していると判定した場合にはステップS902に処理を移し、予め設定した速度を超過していないと判定した場合には当該駆動装置制御処理を終了する。
【0085】
(ステップS902)
上記ステップS901において、所定速度を超過していると判定した場合には、CPUは、リヤコンビランプ17Lが通常位置にあるか否かを判定する。その結果、リヤコンビランプ17Lが通常位置にないと判定した場合にはステップS903に処理を移し、リヤコンビランプ17Lが通常位置にあると判定した場合には当該駆動装置制御処理を終了する。
【0086】
(ステップS903)
このステップS903の処理は、高所作業車1の走行速度が予め設定された速度を超過しており、かつ、リヤコンビランプ17Lが通常位置ではない(退避位置である)場合に行われる。つまり、第8実施形態においては、走行速度検出手段109によって、車両が走行状態または走行可能状態にあることを検出する本発明の走行可否検出手段が構成されている。
上記のように、リヤコンビランプ17Lが通常位置にないまま、高所作業車1が所定の速度を超過して走行している場合には、CPUは、リヤコンビランプ17Lを通常位置に復帰させるように駆動モータMを駆動する。なお、駆動モータMの駆動については上記第7実施形態と同様である。
以上のように、この第8実施形態によっても、上記第7実施形態と同様の効果を実現することができる。
【0087】
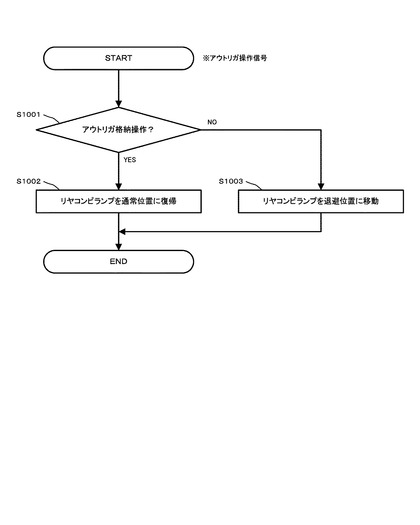
図16を用いて、本発明の第9実施形態について説明する。なお、この第9実施形態の高所作業車は、コントローラCのROMに格納された駆動装置制御処理を実行するプログラムのみが上記第7実施形態と異なり、その他の構成は全て上記第7実施形態と同じである。したがって、上記第7実施形態と同様の構成については上記と同様の符号を付するとともに、その詳細な説明は省略し、ここでは第9実施形態の特徴的な構成である駆動装置制御処理について説明する。
この第9実施形態においては、アウトリガジャッキ装置9,10を張り出すように操作レバー等のアウトリガ操作手段を操作した場合(張り出し操作を行った場合)には、アウトリガジャッキ装置操作入力手段106は張り出し操作信号を出力する。また、アウトリガジャッキ装置9,10を格納するように操作レバー等のアウトリガ操作手段を操作した場合(格納操作を行った場合)には、アウトリガジャッキ装置操作入力手段106は、格納操作信号を出力する。この第9実施形態においては、アウトリガジャッキ装置操作入力手段106から、コントローラCに上記の張り出し操作信号または格納操作信号が入力することによって実行される。
【0088】
(ステップS1001)
アウトリガジャッキ装置操作入力手段106から信号が入力すると、CPUは、当該操作信号が格納操作信号であるか否かを判定する。その結果、コントローラCに入力した信号が、格納操作信号であると判定した場合にはステップS1002に処理を移し、張り出し操作信号であると判定した場合にはステップS1003に処理を移す。
【0089】
(ステップS1002)
上記ステップS1001において、コントローラCに入力した信号が格納操作信号であると判定した場合には、CPUは、リヤコンビランプ17Lを通常位置に復帰させるように駆動モータMを駆動する。なお、駆動モータMの駆動については上記第7実施形態と同様である。
【0090】
(ステップS1003)
一方、上記ステップS1001において、コントローラCに入力した信号が格納操作信号ではない(張り出し操作信号である)と判定した場合には、CPUは、リヤコンビランプ17Lを退避位置に移動させるように駆動モータMを駆動する。
【0091】
以上のように、この第9実施形態においては、アウトリガ格納操作が行われたことをもって、車両が走行状態または走行可能状態にあると判断し、アウトリガ張り出し操作が行われたことをもって、車両が走行状態または走行可能状態ではないと判断している。したがって、この第9実施形態においては、アウトリガジャッキ装置操作入力手段106によって、本発明の走行可否検出手段が構成されることとなる。
この第9実施形態によれば、アウトリガ操作手段による格納操作に基づいて、リヤコンビランプ17Lを通常位置へ復帰させるので、作業の終了とともにリヤコンビランプ17Lが通常位置へ復帰することとなる。したがって、リヤコンビランプ17Lを通常位置へ復帰するのを忘れてしまうことがなく、当該リヤコンビランプ17Lを視認しにくい状態で走行してしまうのを防ぐことができ、走行中におけるリヤコンビランプ17Lの視認性を常に確保することができる。
しかも、アウトリガ操作手段による張り出し操作に基づいて、リヤコンビランプ17Lを退避位置へ移動させるので、車両が安定支持される状態になってから作業者を架装物に昇らせることができる。言い換えれば、車両が安定支持されない状態では、昇降経路上にリヤコンビランプ17Lを位置させて作業者の昇降を妨げることができ、これによって作業者が架装物に昇る際の安全を確保することができる。
【0092】
なお、上記第7〜9実施形態においては、パーキングブレーキON/OFF検出手段101、チェンジギヤ位置検出手段102、走行速度検出手段109、アウトリガジャッキ装置操作入力手段106によって、車両が走行状態または走行可能状態にあることを検出することとしたが、上記第2,3実施形態と同様に、アウトリガ状態検出手段107またはPTO作動検出手段108によって、車両が走行状態または走行可能状態にあることを検出するようにしても構わない。つまり、駆動装置制御処理には本発明の走行可否検出手段が必要となるが、車両が走行状態または走行可能状態であるか否かを判断することができれば、その構成は上記第7〜9実施形態に限らない。
また、上記第7〜9実施形態を、上記第1〜6実施形態と適宜組み合わせて、駆動装置制御処理と、報知装置制御処や規制装置制御処理とを行うようにしてもよいこと当然である。
【0093】
なお、上記第1〜9実施形態におけるリヤコンビランプ17Lが、本発明の後方灯火手段に相当する。
また、上記第1〜9実施形態におけるバケット7が、本発明の作業床に相当する。
また、CPUがROMに格納されたプログラムを読み出して行う、図7〜図10に示す報知装置制御処理が、本発明の報知手段に相当する。
また、CPUがROMに格納されたプログラムを読み出して行う、図11〜図13に示す規制装置制御処理が、本発明の退避規制手段に相当する。
また、上記第1〜9実施形態における駆動モータMが、本発明の駆動装置に相当する。
また、CPUがROMに格納されたプログラムを読み出して行う、図14〜図16に示す駆動装置制御処理が、本発明の駆動制御手段に相当する。
【符号の説明】
【0094】
1 高所作業車
2 車台
5 ブーム
6 旋回装置
7 バケット
8 起伏シリンダ
9,10 アウトリガジャッキ装置
17L,17R リヤコンビランプ
20 退避規制装置
21 ロック部材
22 ロック孔
101 パーキングレーキON/OFF検出手段
102 チェンジギヤ位置検出手段
103 リヤコンビランプ位置検出手段
104 退避規制装置の操作入力手段
105 退避規制装置のロック状態検出手段
106 アウトリガジャッキ装置操作入力手段
107 アウトリガ状態検出手段
108 PTO作動検出手段
109 走行速度検出手段
121 報知装置
C コントローラ
M 駆動モータ
S1,S2 本発明の踏み面として機能するスペース
【特許請求の範囲】
【請求項1】
架装物が架装された車台には、該車台の後方から視認可能な後方灯火手段が設けられ、前記架装物または車台の一部、もしくは、前記架装物または車台に取り付けられた専用部材によって形成される複数段の踏み面を有する昇降経路を備えた作業用車両において、
前記後方灯火手段は、前記昇降経路上であって前記車台の後方から視認可能な通常位置と、該通常位置よりも後方灯火手段の一部または全部が前記昇降経路上から退避する退避位置との間を移動可能に設けられたことを特徴とする作業用車両。
【請求項2】
前記車台には作業床を昇降させる昇降装置が架装されたことを特徴とする請求項1記載の作業用車両。
【請求項3】
車両が走行状態または走行可能状態にあることを検出する走行可否検出手段と、
前記後方灯火手段の位置を検出する位置検出手段と、
前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出され、かつ、前記位置検出手段によって前記後方灯火手段が通常位置にないことが検出されたとき、前記後方灯火手段が通常位置にないことを報知する報知手段と、を備えたことを特徴とする請求項1または2記載の作業用車両。
【請求項4】
車両が走行状態または走行可能状態にあるか否かを検出する走行可否検出手段と、
前記後方灯火手段の前記通常位置から退避位置への移動を規制するための退避規制装置を制御する退避規制手段と、を備え、
前記退避規制手段は、
前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されている場合には、前記後方灯火手段の移動を規制するとともに、車両の走行状態または走行可能状態であることが検出されていない場合には、前記後方灯火手段の移動を許容するように前記退避規制装置を制御することを特徴とする請求項1または2記載の作業用車両。
【請求項5】
車両が走行状態または走行可能状態にあるか否かを検出する走行可否検出手段と、
前記後方灯火手段に対して、少なくとも前記退避位置から通常位置へ復帰させる駆動力を付与するための駆動装置を制御する駆動制御手段と、を備え、
前記駆動制御手段は、
前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されたとき、前記駆動装置を駆動して前記後方灯火手段を通常位置へ復帰させることを特徴とする請求項1または2記載の作業用車両。
【請求項6】
アウトリガ操作手段による張り出し操作に基づいて前記車台の幅方向に張り出したアウトリガフロートを接地面に接地させ、前記アウトリガ操作手段による格納操作に基づいて前記アウトリガフロートの接地を解除するアウトリガジャッキ装置を備え、
前記駆動制御手段は、
前記アウトリガ操作手段による格納操作に基づいて、前記駆動装置を駆動して前記後方灯火手段を通常位置へ復帰させることを特徴とする請求項5記載の作業用車両。
【請求項7】
前記駆動装置は、前記後方灯火手段を前記通常位置から退避位置へ移動させる駆動力を付与するとともに、
前記駆動制御手段は、
前記アウトリガ操作手段による張り出し操作に基づいて、前記駆動装置を駆動して前記後方灯火手段を退避位置へ移動させることを特徴とする請求項5または6記載の作業用車両。
【請求項1】
架装物が架装された車台には、該車台の後方から視認可能な後方灯火手段が設けられ、前記架装物または車台の一部、もしくは、前記架装物または車台に取り付けられた専用部材によって形成される複数段の踏み面を有する昇降経路を備えた作業用車両において、
前記後方灯火手段は、前記昇降経路上であって前記車台の後方から視認可能な通常位置と、該通常位置よりも後方灯火手段の一部または全部が前記昇降経路上から退避する退避位置との間を移動可能に設けられたことを特徴とする作業用車両。
【請求項2】
前記車台には作業床を昇降させる昇降装置が架装されたことを特徴とする請求項1記載の作業用車両。
【請求項3】
車両が走行状態または走行可能状態にあることを検出する走行可否検出手段と、
前記後方灯火手段の位置を検出する位置検出手段と、
前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出され、かつ、前記位置検出手段によって前記後方灯火手段が通常位置にないことが検出されたとき、前記後方灯火手段が通常位置にないことを報知する報知手段と、を備えたことを特徴とする請求項1または2記載の作業用車両。
【請求項4】
車両が走行状態または走行可能状態にあるか否かを検出する走行可否検出手段と、
前記後方灯火手段の前記通常位置から退避位置への移動を規制するための退避規制装置を制御する退避規制手段と、を備え、
前記退避規制手段は、
前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されている場合には、前記後方灯火手段の移動を規制するとともに、車両の走行状態または走行可能状態であることが検出されていない場合には、前記後方灯火手段の移動を許容するように前記退避規制装置を制御することを特徴とする請求項1または2記載の作業用車両。
【請求項5】
車両が走行状態または走行可能状態にあるか否かを検出する走行可否検出手段と、
前記後方灯火手段に対して、少なくとも前記退避位置から通常位置へ復帰させる駆動力を付与するための駆動装置を制御する駆動制御手段と、を備え、
前記駆動制御手段は、
前記走行可否検出手段によって車両の走行状態または走行可能状態であることが検出されたとき、前記駆動装置を駆動して前記後方灯火手段を通常位置へ復帰させることを特徴とする請求項1または2記載の作業用車両。
【請求項6】
アウトリガ操作手段による張り出し操作に基づいて前記車台の幅方向に張り出したアウトリガフロートを接地面に接地させ、前記アウトリガ操作手段による格納操作に基づいて前記アウトリガフロートの接地を解除するアウトリガジャッキ装置を備え、
前記駆動制御手段は、
前記アウトリガ操作手段による格納操作に基づいて、前記駆動装置を駆動して前記後方灯火手段を通常位置へ復帰させることを特徴とする請求項5記載の作業用車両。
【請求項7】
前記駆動装置は、前記後方灯火手段を前記通常位置から退避位置へ移動させる駆動力を付与するとともに、
前記駆動制御手段は、
前記アウトリガ操作手段による張り出し操作に基づいて、前記駆動装置を駆動して前記後方灯火手段を退避位置へ移動させることを特徴とする請求項5または6記載の作業用車両。
【図2】



【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】

【図11】
【図12】
【図13】
【図14】

【図15】

【図16】
【図1】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図1】
【公開番号】特開2011−32019(P2011−32019A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−178659(P2009−178659)
【出願日】平成21年7月31日(2009.7.31)
【出願人】(000148759)株式会社タダノ (419)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年7月31日(2009.7.31)
【出願人】(000148759)株式会社タダノ (419)
【Fターム(参考)】
[ Back to top ]