
Fターム[2B034BA07]の内容
Fターム[2B034BA07]に分類される特許
181 - 200 / 359
畦塗り機
【課題】大きな上下振動が発生せず、崩れにくい強固な畦を形成できる畦塗り機を提供する。
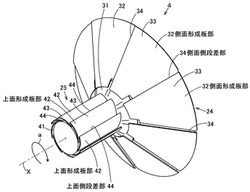
【解決手段】畦塗り機1は、盛土体と、この盛土体の後方に位置する畦形成体4とを備える。畦形成体4は、回転中心軸線Xを中心として回転しながら盛土を締め固めて畦側面を形成する畦側面形成体24を備える。畦形成体4は、回転中心軸線Xを中心として回転しながら盛土を締め固めて畦上面を形成する畦上面形成体25を備える。畦側面形成体24は複数の側面形成板部32を有し、互いに隣り合う側面形成板部32間には側面側段差部34がある。畦上面形成体25は複数の上面形成板部42を有し、互いに隣り合う上面形成板部42間には上面側段差部44がある。側面側段差部34の位置と上面側段差部44の位置とが回転方向aに関してずれている。
(もっと読む)
畦塗り機

【課題】一定の耕耘性能を保つことができ、所望の盛土量を得ることができる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を耕耘して盛り上げる盛土体3と、盛土体3を支持する盛土体支持フレーム21とを備える。畦塗り機1は、盛土体3の後方で盛土を締め固めて畦を形成する畦形成体4と、畦形成体4を支持する畦形成体支持フレーム22とを備える。畦形成体支持フレーム22に対して盛土体支持フレーム21を上下平行移動させることにより、盛土体3の作業姿勢を一定に維持したまま盛土体3の耕耘深さを調整可能な調整手段76を設ける。
(もっと読む)
乗用田植機
【課題】 本発明の課題は、枕地(圃場の畦の近傍)で整地作業を忘れることなく、枕地に来ると自動的に整地作業をする乗用田植機を提供することである。
【解決手段】 左右の前輪及び後輪を備える走行車体の後部に昇降リンク装置を介して苗植付部を昇降可能に装着し、マーカアームを線引き作用部が圃場内に線を引く線引き位置とマーカアームを起立する非線引き位置に作動させる線引きマーカを設け、走行車体の後側で且つ苗植付部よりも前側に配置されると共に苗植付部に取り付けられる均平装置(28)を設け、電動モータ(37)の正逆転により支持アーム(32)を回動させて均平装置(28)を昇降させると共に、バネ(33)の付勢力に抗して支持アーム(32)が下側へ回動する構成とした乗用田植機とした。
(もっと読む)
畦塗り機
【課題】散布ノズルから畦形成手段に向けて散布される液体の散布量を調整できる畦塗り機を提供する。
【解決手段】畦塗り機1は、元畦上に土を盛り上げる盛土手段21と、盛土を締め固めて新畦を形成する畦形成手段22とを備える。畦塗り機1は散布手段31を備え、散布手段31は、ポンプ33、このポンプ33を作動させるアクチュエータおよびポンプ33の作動により畦形成手段22に向けて液体を散布する散布ノズル36を有する。畦塗り機1は、液体の散布量を設定する設定操作手段41と、設定操作手段41の設定に応じて散布手段31のアクチュエータを制御して液体の散布量を調整する制御手段42とを備える。
(もっと読む)
水田用除草機
【課題】条間除草機構及び株間除草機構の除草の作業深さを別個に調整しなければならず、かつその操作も面倒で、除草の準備作業に時間が掛ってしまう。
【解決手段】メインフレーム3と支持ベース4との間に作業深さ均等調整機構10を介在し、ハンドル10bにより、株間除草機構6及び条間除草機構5を上下方向に平行に調整する。作業深さ相対調整機構を介して条間除草機構5を連結し、操作レバー11により、株間除草機構6に対して条間除草機構5を上下方向に調整する。
(もっと読む)
畝成形機
【課題】 ロータリ耕耘装置の後方に、該ロータリ耕耘装置で耕耘された土で畝を成形する畝成形具を備えると共に、走行体の後部に装着されて圃場を移動しながら該圃場に畝を成形する畝成形機において、既成形畝に一部オーバーラップさせながら該既成形畝に隣接する畝を成形する際に、該既成形畝の、崩された側の上面及び側面を修復することができる畝成形機を提供する。
【解決手段】 既成形畝R2に一部オーバーラップさせながら該既成形畝R2に隣接する畝R1を成形する際に、前記既成形畝R2の、崩された側の上面Ra及び側面Rbを修復する補助畝成形具19を設ける。
(もっと読む)
畝成形機
【課題】 ロータリ耕耘装置の後方に、該ロータリ耕耘装置で耕耘された土で畝を成形する畝成形具を備えると共に、この畝成形具の側方に圃場に接地して機体荷重を支えるゲージ体を備え、走行体の後部に装着されて圃場を移動しながら該圃場に畝を成形する畝成形機において、既成形畝に一部オーバーラップさせながら該既成形畝に隣接する畝を成形する際に、前記既成形畝の、崩された側の上面を修復することができ、しかも、畝上面に対する上面成形具の押え力を十分に確保できる畝成形機を提供する。
【解決手段】 既成形畝R2に一部オーバーラップさせながら該既成形畝R2に隣接する畝R1を成形する際に、前記既成形畝R2の、崩された側の上面Raを修復する上面成形具66を設け、この上面成形具66を、前記ゲージ体37に立設された支持体67に設ける。
(もっと読む)
ロータリ耕耘装置
【課題】耕耘爪と、耕耘爪の後方を覆い圃場の均平を行うことが可能なリヤカバーと、該リヤカバーの後端部に取り付けられた整地体とを備えたロータリ耕耘装置において、効率の良い均平整地作業を行うことができるリヤカバー及び整地体を備えたロータリ耕耘装置を提供することを課題とする。
【解決手段】耕耘爪29aと、耕耘爪29aの後方を覆い圃場の均平を行うことが可能なリヤカバー36と、該リヤカバー36の後端部に取り付けられた整地体47とを備え、該整地体47をリヤカバー36に対して上下揺動自在な状態と、リヤカバー36に対して揺動角度を固定した状態とに切換可能に構成したロータリ耕耘装置において、整地体47の下降側の揺動限界を圃場の土寄せ作業位置とする規制手段48aと、該揺動範囲内の任意の位置で整地体47をリヤカバー36に対して固定する固定手段51,53とを設ける。
(もっと読む)
畦塗り機
【課題】崩れにくい強固な新畦を得ることができる畦塗り機を提供する。
【解決手段】畦塗り機21は、元畦上に土を盛り上げる盛土手段41と、盛土手段41による盛土を締め固めて新畦を形成する畦形成手段42とを備える。盛土手段41の進行方向前方には元畦の上面を切削する前処理手段43を上下動可能に配設する。畦塗り機21は、前処理手段43の上下動に応じて動く連動棒体53を備え、連動棒体53を筒状支持体55にスライド可能に支持させる。連動棒体53の外周側で第1受体61と筒状支持体55の軸方向一端との間にはコイルばね63を配設する。連動棒体53の外周側で第2受体62と筒状支持体55の軸方向他端との間にはコイルばね63より弾性変形しにくい防振ゴム64を配設する。
(もっと読む)
除草機
【課題】慣行の除草方法は農薬による化学的除草が一般的で、これは人体や環境にとって必ずしも良い方法とは言えない。一方の物理的除草方法では温暖な地域での無農薬農業に導入できるような除草機の開発が遅れている。
【解決手段】弾性ワイヤを用いて形成された除草爪を具したトラクタロータリ状の除草爪本体を高速で回転させることにより地表付近の土壌を雑草とともに攪拌し、粉砕・埋没させることで除草能力を向上させた。また磨耗した弾性ワイヤの交換も容易に行えるような構造とした。さらには除草面の凹凸に除草爪本体が滑らかに追従するような機構を組み込み作業ロスを軽減した。
(もっと読む)
畦塗り機
【課題】崩れにくい締まった新畦を形成できる畦塗り機を提供する。
【解決手段】畦塗り機11は、元畦Aを掘削する掘削手段13と、掘削土を押圧して新畦Bを形成する畦形成手段14とを備える。掘削手段13は、元畦Aの傾斜状の畦側面に対して平行状でかつ側面視で上下方向に対して傾斜状の回転軸31を有する。回転軸31には、この回転軸31とともに回転して元畦Aの畦側面を掘削する複数の掘削爪32を設ける。複数の掘削爪32にて元畦Aの畦側面の全体を掘削し、その元畦Aの畦側面に互いに連続した複数の凹弧面からなる凹凸状部を形成する。この凹凸状部の各凹弧面上の掘削土を畦形成手段14で押圧して新畦の畦側面を形成する。
(もっと読む)
平行リンク装置
【課題】安価なコイルばねを使用して、従来の直線コイルばねに比較して平行リンクの変位に対する作用フレーム押圧力の均一化を飛躍的に改善させる。
【解決手段】ボルト取付けフレームに上下横リンクの基端側を所定間隔を隔てて枢着し、平行にした前記上下横リンクの先端側を縦長の作用フレームに枢着した上下変位自在の平行リンクを備え、前記平行リンクの下死点変位位置において前記取付けフレームの上部と平行リンクの上下可動部間に引っ張りコイルばねを所望曲率の円弧状に湾曲させた状態で架設し、これにより、平行リンクの上下移動に連動して作用フレームの下方押圧力が均一的に制御されるようにする。前記取付けフレームの上部と平行リンクの上下可動部間に、両端取付け部を外側同方向へ折り曲げた引っ張りコイルばねを架設してもよい。
(もっと読む)
植物掘起し装置
【課題】
掘起した作物の残幹や残根の掘り起こしと同時に畝を崩して畝溝を埋め、畝溝に植生する雑草を埋没させると共に残幹や残根を回収できる植物掘起し装置を提供することを課題とする。
【解決手段】
進行方向に対して左右方向姿勢の回転軸23を中心として回転する左右支持部材22,22を設け、左右支持部材22,22の間に植物の残幹Tを圃場から掘り起こす複数の掘起し体27を設けた植物掘起し装置において、回転軸23の中心部から機体外側方向に畝を崩して畝溝に土を排出する左右螺旋体28a,28bからなる排土部材28を設けると共に、複数の掘起し体27に残幹Tを後方に案内する排土部材28よりも大径の左右案内部材29,29を設けて構成する。
(もっと読む)
砕土作業機の延長整地体
【課題】均平精度の良い砕土作業機の延長整地体を提供する。
【解決手段】延長整地体15の接地面15cは断面逆V字状の直線溝15bが平面視、進行方向に対し前方から後方へ且つ外側から内側に向け傾斜して設けてある。断面逆V字状の直線溝15bは平面に接地状態で延長整地体15の前方から後方に連通する空間29を有し、断面形状は外側の勾配が大きく内側の勾配が小さく形成され左右方向に複数設けられ、延長整地体15と整地体14を連結し回動させる連結軸26は、側面視で進行方向前方が高く、後方が低く傾斜して設けられていることを特徴とする砕土作業機の延長整地体を提供する。
(もっと読む)
畦成形機
【課題】従来は、作業部に方向等を感知するセンサーが必要であり、制御が複雑となり全体のコストが嵩む問題があった。
【解決手段】装着フレーム1から後方へ延設され、装着フレーム1に対し第1水平回動軸30を回動中心に第1水平回動手段3によって水平回動自在に設けられた支持フレーム2と、支持フレーム2の後端部に設けられた第2水平回動軸40を中心に、第2水平回動手段4による回動又はフリー回動によって水平方向に回動可能である畦成形作業部5と、第1水平回動手段3と、第2水平回動手段4とをそれぞれ制御する制御部と、第1水平回動手段及び/又は第1水平回動軸と第2水平回動手段及び/又は第2水平回動軸の変位量を検知する検知手段を有し、畦成形作業を行なうことが可能である畦成形機による。
(もっと読む)
土壌作業装置
機械フレーム38と、昇降され得る穿孔工具1のためのドライブ36で、穿孔工具を土壌8に抜き差しするドライブと、穿孔工具のために機械フレーム38上で移動可能に案内されるガイド要素30と、穿孔工具のための工具ホルダ2とを備える移動型土壌作業装置に関する。力の作用がもはや生じないときに装置が第1の回動軸周りに作用する復原モーメントを工具ホルダに及ぼし、それにより穿孔工具が土壌からの引き抜き後に元の開始位置へと再び回動する場合、工具ホルダと穿孔工具の全体の重心は、第1の回動軸周りに作用する慣性モーメントが復原モーメントの少なくとも一部を形成するべく復原モーメントに抗する工具ホルダと穿孔工具の慣性モーメントが少なくとも部分的に減少又は補償されるように第1の回動軸に対して配置される。 (もっと読む)
畝成形管理機
【課題】
耕耘爪を機体前側に形成する管理機においては、耕耘爪の駆動反力により機体前側が浮くことを防止することを課題とする。
【解決手段】
ミッションケース(1)から前方に向けて作業機フレーム(35)を取り付け、該作業機フレーム(35)の左右には前記耕耘爪(23)の上方を覆う耕耘カバー(33,33)を前後方向軸芯回りに上下回動自在に連結し、作業機フレーム(35)の前方にはゲージホイル(40)を上下調節自在に支持し前下がり傾斜で配置される固定パイプ(42)と、固定パイプ(42)より前側にあってかつ固定パイプ(42)の傾斜角度よりも急な角度で前下がりに配置する作業機取付具(70)とを取り付ける構成としたことを特徴とする畝成形管理機とする。
(もっと読む)
畦成形機
【課題】走行機を旋回及び停止させながら圃場隅部の畦成形を容易に行えるとともに堅固な畦を成形できる。
【解決手段】装着フレーム1から斜め後方へ延設され、装着フレーム1に対し第1水平回動手段21によって水平回動自在に設けられた支持フレーム2と、支持フレーム2に水平移動手段4によって装着フレーム1に対して遠近移動可能である第2水平回動軸54を中心に第2水平回動手段6による回動又はフリー回動によって水平方向に回動可能である畦成形作業部5と、第1水平回動手段21と、第2水平回動手段6と、水平移動手段4とをそれぞれ制御する制御部とを有し、畦成形作業部5を走行機の側方にオフセットさせ、畦と平行に走行機Tを走行させ畦成形作業を行なうことが可能であり、走行機Tが旋回走行しながら直線状の連続した畦を成形する畦成形作業を行なうことが可能である畦成形機による。
(もっと読む)
農作業機
【課題】走行機体の後部に装着し、作業時に耕耘体に障害物などにより衝撃的な負荷増大があった場合でも作業機の破損を防止でき安定した作業が行える農作業機を提供することを目的とする。
【解決手段】耕耘体13は、本体フレーム部に対して回動移動する機構であり、本体フレーム部と耕耘体13の間には、回動移動により耕耘体13が被作業部から離れる方向に移動すると縮む方向に力が作用する弾性減衰体1が装着され、弾性減衰体1は、弾性体2と減衰体3とを有し、耕耘体13から弾性減衰体1にかかる力が一定以上のである場合に弾性体2の力に抗して縮むことを特徴とする農作業機。
(もっと読む)
畦成形機
【課題】圃場が軟弱となった場合、走行機の旋回が理論上の軌跡から大きく逸脱してしまう確率が高く畦成形作業部の位置や姿勢を正しくコントロールできなかった。
【解決手段】装着フレーム1に対し第1水平回動手段21によって水平回動自在に設けられた支持フレーム2と、支持フレーム2に移動可能に設けられるとともに、水平移動手段4によって装着フレーム1に対して遠近移動可能であり、かつ遠近移動可能である第2水平回動軸54を中心に第2水平回動手段による回動又はフリー回動によって水平方向に回動可能である畦成形作業部5とを有し、走行機Tを停止して畦成形作業部5を走行機の側方において走行方向に移動させて畦成形作業を行なうことが可能である畦成形機による。
(もっと読む)
181 - 200 / 359
[ Back to top ]