
Fターム[2B034BC06]の内容
Fターム[2B034BC06]に分類される特許
41 - 60 / 635
硬盤破砕機
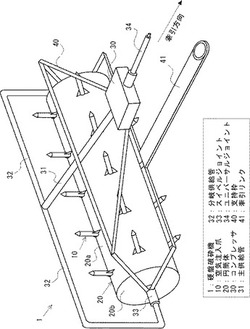
【課題】圃場の硬盤を効率的に破砕する硬盤破砕機を提供する。
【解決手段】水平軸を具備する円筒体20と、径方向外方に突出する複数の棒状の空気注入爪10と、圧縮空気を供給するコンプレッサ30と、を備え、空気注入爪10は、管状部11と、管状部11の側面孔11aと、内面に対してスライド可能に挿入されたスライド部13と、を備え、スライド部13は、内部に設けられた圧縮空気流路13aと、側面に開口する噴出孔13bと、円筒体20の内部と連通させる開状態と遮断させる閉状態との間で切り替わるバルブ13cと、コイルスプリング12と、管状部11よりも突出する先端部13e3とを備え、スライド部13の先端部13eが地中で押されると、スライド部13がコイルスプリング12を圧縮して移動してバルブ13cが開状態となり、円筒体20の内部の圧縮空気が噴出孔13bを介して噴出する。
(もっと読む)
オフセット作業機

【課題】オフセット作業機のオフセット量及び作業部の回動量制御を簡易な方法で行うことができるオフセット作業機を提供する。
【解決手段】走行機への装着部11と、該装着部11から延設した平面視平行リンクで構成されたオフセットフレーム21と、該オフセットフレーム21の移動端側に設けられ水平方向回動自在の作業部30と、オフセットシリンダ23と、作業部回動シリンダ301と、前記シリンダの作動を制御する制御部aを有するオフセット作業機において、該オフセット作業機は、前進作業位置と、後進作業位置とに変更可能で、前記作業位置変更は、オフセットフレーム21の回動角度検出手段の情報のみによりオフセットシリンダ23と作業部回動シリンダ301の作動を制御する制御部aにより行われるオフセット作業機による。
(もっと読む)
代掻き作業機
【課題】前方の藁を効率良く鋤込み作業できる代掻き作業機を提供すること。
【解決手段】走行機体1の後部に装着され、走行機体1から伝達される動力によって左右方向に設けられる回転軸を中心として回転動する代掻きロータ30L,30C,30Rを備え、代掻きロータ30L,30C,30Rが回転しながら走行機体1の走行とともに進行して代掻き作業を行う代掻き作業機1であって、代掻きロータ30L,30C,30Rの上方を覆うシールドカバー40L,40C,40Rを備え、シールドカバー40L,40C,40Rは、左右方向の中央側から両端側に向かって前方に突出するように傾斜していること。
(もっと読む)
耕耘作業機
【課題】土寄せ板を容易に機体に着脱することができ、土寄せ板の装着時に土寄せ板を倉庫等に取りに行く煩わしさがない耕耘作業機を提供する。
【解決手段】代かき作業機1は、車輪を有して走行可能な走行機体の後部に装着され、耕耘ロータを回転させながら走行機体の前進走行に伴って進行して圃場を耕耘し、耕耘ロータを回転自在に支持する機体5に、走行機体の車輪の通過により圃場表面に形成された凹部に土を寄せることが可能な土寄せ板50が設けられる。土寄せ板50は、機体5に前後方向に回動自在に設けられたアーム部材60に連結されて、アーム部材60の回動に応じて、凹部に土を寄せるときに装着される機体の土寄せ位置Psと、土寄せ板50を機体5に格納するときに装着される機体の格納位置Pkとの間を移動自在である。
(もっと読む)
整畦機
【課題】機枠体を移動機構により走行機体の進行方向に対して直交する左右方向に移動させると共に放出位置変向機構により跳上回転体の一方向の回転により跳ね上げられる泥土を一方側方位置又は他方側方位置の畦の上に選択的に放出案内させ、後方位置に配置された左右一対の前整畦体及び後整畦体のいずれかにより畦を整畦することができる。
【解決手段】整畦機構7として、機枠体4に走行機体1の進行方向の回転軸線O廻りに一方向Nに回転して泥土を跳上可能な跳上回転体8を設け、跳上回転体の上方位置に泥土を一方側方位置R又は他方側方位置Lの畦Wの上に選択的に放出案内可能な放出位置変向機構9を設け、後方位置に一方側方位置又は他方側方位置の畦を整畦可能な左右一対の前整畦体10aを設け、前整畦体の後方位置に一方側方位置又は他方側方位置の畦を整畦可能な左右一対の後整畦体10bを設けてなる。
(もっと読む)
折り畳み作業機
【課題】走行機体のタイヤ跡を埋め戻すことができる折り畳み作業機を提供すること。
【解決手段】作業機本体10の幅方向に延出する延長作業機体(左作業体20L)が、作業機本体10側に折り畳み可能に構成され、延長作業機体が展開された状態で、作業機本体10の耕耘ロータ30Cに設けられた駆動クラッチ18と延長作業機体の耕耘ロータ30Lに設けられた従動クラッチ31Lとが連結可能に構成され、走行機体90から作業機本体10に伝達された動力が駆動クラッチ18及び従動クラッチ31Lを介して延長作業機体の耕耘ロータ30Lに伝達され、従動クラッチ31Lには少なくとも3以上の耕耘爪43を固定できるフランジ40が設けられ、耕耘爪43は、先端側が作業機本体側に湾曲した耕耘爪43aと、先端側が作業機本体と逆側に湾曲した耕耘爪43bと、からなり、耕耘爪43bより耕耘爪43aの数が多いこと。
(もっと読む)
耕耘作業機
【課題】土寄せ板を容易に機体に着脱することができ、土寄せ板の装着時に土寄せ板を倉庫等に取りに行く煩わしさがない耕耘作業機を提供する。
【解決手段】代かき作業機1は、車輪を有して走行可能な走行機体の後部に装着され、耕耘ロータ13を回転させながら走行機体の前進走行に伴って進行して圃場を耕耘し、耕耘ロータ13を回転自在に支持する機体5に、走行機体の車輪の通過により圃場表面に形成された凹部に土を寄せることが可能な土寄せ板50が設けられる。土寄せ板50は、凹部に土を寄せるときに装着される機体5の土寄せ位置Psと、土寄せ板50を機体5に格納するときに装着される機体5の格納位置Pkに、選択的に着脱可能に装着される。
(もっと読む)
オフセット作業機
【課題】複雑な操作を必要とせず、簡易的な手動操作により、作業部の前進作業位置と反転作業位置との間における移動を可能とするとともに非作業位置への移動についても可能とし、作業部を移動させる動作に効率良く活かすことができる畦塗り機を提供する。
【解決手段】作業部60を非作業位置から作業位置(前進作業位置及び反転作業位置)に移動させる場合、操作者は片手によりロック状態を解除し、そのままもう片一方の手でグリップ部89を掴み、両手の力を利用して、作業部60を作業位置(前進作業位置及び反転作業位置)に向けて移動させることができる。また、作業部60を作業位置(前進作業位置及び反転作業位置)に移動させた後に、ロック解除操作部52及び把持部90を掴んでいる片手を放すことで、ロックピンが外筒及び内棒に施された孔部に挿入され、手動式伸縮調整機構17が伸びた状態でロックされる。
(もっと読む)
畦塗り機
【課題】畦塗り機における揺動機構に設けられ、走行機体に対して畦塗り機を揺動させるための伸縮機構について、操作が容易であるとともに、揺動された状態において容易にロックすることができる手動型伸縮機構を提供する。
【解決手段】操作者はロック解除操作部52と一緒に把持部40についても同時に片手持ちするように掴むことで、弾性部材55の弾性力に反発して、ロック解除操作部52が支持軸部54を回動中心として回動されて、ロックピン51が内孔部35から抜かれることとなる。その結果、外筒20と内棒30とが互いに摺動可能となり、手動式伸縮調整機構17が全体的に伸縮することが可能となる。また、手動式伸縮調整機構17が伸縮した後に、操作者が掴んだ手を放すことで、ロックピン51が内孔部35に挿入されて、伸縮状態がロックされることとなる。
(もっと読む)
畝立施肥装置
【課題】 部分耕耘施肥において、同時に散布する薬剤を畝立部断面全体に分布すべく行き渡らせて施用効果を高めようとする。
【解決手段】トラクタ車体1の後方に耕耘ロータリ6と耕耘土壌を受けて畝成形する畝成形器7を装着し、耕耘ロータリ6の耕耘軸15には複数の耕耘爪23,23…と畝成形器7で成形する畝の畝幅間で対応する対のディスク25,25を配設し、粉粒状物を繰り出す繰出手段Hを設け、対向するディスク25,25間またはその前方において繰り出された粉粒状物を土壌と共に攪拌する畝立施肥装置において、前記畝成形器7による畝の略全幅に相当して粉粒状物を拡散する拡散手段Kを設ける。
(もっと読む)
畦塗り機
【課題】畦塗り機における作業部について、土作業を行う作業位置と土作業を行わない非作業位置との間で移動させる際に、走行機体に対する作業部の上下動作を行うことなく、畦塗り機における揺動機構に設けられた伸縮部材の伸縮動作のみにより移動作業を行うことができる畦塗り機の提供。
【解決手段】右移動途中位置から右作業位置に移動させたときには、第1ガススプリング20及び第2ガススプリング30が共に縮むこととなる。このため、右作業位置から右移動途中位置に向けてオフセットフレーム11を移動させる際には、主に第2ガススプリング30の反発力を補助力とするとともに、追加的に第1ガススプリング20の反発力も働きながら、既設の揺動シリンダにかかる負担を補助する。
(もっと読む)
畦塗り機
【課題】畦塗り機の前処理部におけるカバー体について、耕耘爪によって掘削された土や土上げ爪によって撥ね上げられた土がカバー体の内側に付着することを防止するとともに、撥ね上げられた土を効率的にカバー体の内側面を沿わせて移動させることができるカバー体を提供する。
【解決手段】前カバー部41と外カバー部43とが装着される前側内角部44の角度を鈍角とすることで、外カバー部43の内側面と複数の耕耘爪20の爪先との距離間を狭くすることができ、かつ、爪軸70の先端側から基端側に向けて、ほぼ一定間隔の狭い空間として構成することとなる。このため、耕耘爪20の回転動作に伴って発生する前側内角部44近辺の気流がスムーズに流れることとなり、前側内角部44近辺の土の付着を抑制することができ、その結果、土上げ爪によって効率的に土を撥ね上げ、土盛りを行うことができる。
(もっと読む)
農作業機の延長整地板回動装置
【課題】延長整地板が展開された農作業機の移動時に、左右の作業体が障害物等に接触しても損傷する虞のない農作業機の延長整地板回動装置を提供する。
【解決手段】延長整地板回動装置40は、代かき作業機1のシールドカバー27の上方に配設され、第2整地板左29Lの左右一方側から他方側へ回動する連動アーム53と、連動アーム53を回動させる正逆回転用モータと、連動アーム53の先端部と延長整地板左30Lとの間に接続されて屈曲自在な連結体60と、モータの作動を制御して連動アーム53を回動させるモータ制御装置70とを備える。モータ制御装置70は、連動アーム53を回動させて延長整地板左30Lが展開位置Ptに移動すると、延長整地板左30Lを展開位置Ptから上方へ回動させない連動アーム53の回動範囲W内に連動アーム53を回動させて、連動アーム53に繋がる連結体60を弛ませる。
(もっと読む)
エプロン部材
【課題】エプロン本体部への土砂の付着を防止するための整地部材の着脱が容易なロータリ作業機のエプロン部材を提供すること。また、付着してしまった土砂を容易に取り除けるようなエプロン部材を提供すること。
【解決手段】エプロン部材1は、作業ロータ5の上方を覆うシールドカバー本体部2に対して上下回動自在に連結されて作業ロータ5の後側を覆うエプロン本体部3と、エプロン本体部3の作業ロータ側に配置され、耕耘地面に当接して整地する整地部材4と、を有し、整地部材4は、エプロン本体部3に対して着脱自在に形成されている。
(もっと読む)
管理作業機の動力伝動装置
【課題】進行方向前方の取付枠体に配設された駆動軸と機枠体側の従動軸との進行方向の距離を長く取ることができ、それだけ、伝動軸の伸縮量を小さくすることができ、機枠体の左右方向の移動による伝動軸の左右方向の振れ動作を円滑に行うことができ、機枠体の左右移動も円滑に行うことができ、自在継手の折曲角度も小さくできて動力伝動を円滑に行うことができ、整畦作業性を向上することができる。
【解決手段】機枠体4の左右移動により左右方向Bに振れ動作する動力伝動機構13の伝動軸13fを、管理作業機構7の上方位置とする干渉回避位置Dに配設してなる。
(もっと読む)
水田用の除草作業機
【課題】弾力性及び可撓性を有する線材を放射方向に突設した除草輪を、苗条に臨ませて回転駆動し進行させることにより、苗の損傷を防止しながら除草を行うことができる水田用の除草作業機を提供する。
【解決手段】機体を走行させながら除草をする水田用の除草作業機3であって、回転駆動される横向きの除草軸23に、弾力性及び可撓性を有する線材33を放射方向に密植状態で突設した除草輪を軸支し、該除草輪を苗条の直上方に位置させ苗条方向に隣接する苗の株間で線材33を接地させて撓ませながら、除草輪を回転駆動させることにより除草するように構成した。
(もっと読む)
整畦機の動力伝動装置
【課題】進行方向前方の取付枠体に配設された駆動軸と機枠体側の従動軸との進行方向の距離を長く取ることができ、それだけ、伝動軸の伸縮量を小さくすることができ、機枠体の左右方向の移動に伴う伝動軸の左右方向の振れ動作を円滑に行うことができ、機枠体の左右移動を円滑に行うことができ、自在継手の折曲角度も小さくできて動力伝動を円滑に行うことができ、整畦作業性を向上することができる。
【解決手段】機枠体4の左右移動により左右方向Bに振れ動作する動力伝動機構13の伝動軸13fを、整畦機構7の上方位置とする干渉回避位置Dに配設してなる。
(もっと読む)
農作業機の延長整地板回動装置
【課題】延長整地板が展開された農作業機の移動時に、連動アームが障害物等に接触しても損傷する虞のない農作業機の延長整地板回動装置を提供する。
【解決手段】延長整地板回動装置40は、代かき作業機1の耕耘ロータの上方に配設された正逆回転用モータ43と、このモータの回転軸に接続されてモータの回動力を伝達する動力伝達機構部47と、この出力軸に接続されて出力軸とともに回動する連動アーム53と、連動アーム53及び延長整地板左30L間に接続されて連動アーム53の回動に伴って延長整地板左30Lを回動させる連結体60とを備え、連動アーム53は、アーム本体部56と、この基部に固定されるとともに動力伝達機構部47の出力軸に接続されて出力軸とともに回動するアーム支持部55とを有し、アーム本体部56は、その基部側がアーム支持部55に回動自在に接続されるとともに、シャーピン57を介してアーム支持部55に固定される。
(もっと読む)
ロータリ作業機
【課題】エプロン部材に付着した土砂をより確実にふるい落とすことが可能なロータリ作業機を提供すること。
【解決手段】エプロン部材1は、エプロン本体部3と、エプロン本体部3に第1エプロン接合手段221dにおいて接合される第1エプロンカバー材21dと、を有し、第1エプロンカバー材21dの第1エプロン接合手段221dとは反対側の第4自由端部121dは、エプロン本体部3及び第1エプロンカバー材21dをシールドカバー本体部2に対して回転させて上側方向位置に移動させた状態にある場合には、作業ロータ5の回転空間S内に位置するように構成されている。
(もっと読む)
エプロン部材
【課題】エプロン本体部への土砂の付着を防止するための整地部材の着脱が容易なロータリ作業機のエプロン部材を提供すること。
【解決手段】エプロン部材1は、作業ロータ5の上方を覆うシールドカバー本体部2に対して上下回動可能に連結されて作業ロータ5の後側を覆うエプロン本体部3と、エプロン本体部3の作業ロータ5側に配置され、耕耘地面に当接して整地する整地部材4と、エプロン本体部3の作業ロータ5側に配置され、整地部材4よりも作業ロータ5側に配置される第5カバー材21eと、を有し、整地部材4は、エプロン本体部3に対して第2接合部103によって接合されて、エプロン本体部3に対して着脱自在に形成されており、第2接合部103と作業ロータ5との間の位置に、第5カバー材21eの後側方向の反対側位置の端部である第5自由端部121eが位置する。
(もっと読む)
41 - 60 / 635
[ Back to top ]