
Fターム[2B052DD04]の内容
施肥 (4,104) | 施肥機における自動制御 (137) | 施肥機の制御 (133) | 散布部の制御 (33)
Fターム[2B052DD04]に分類される特許
1 - 20 / 33
薬剤散布装置
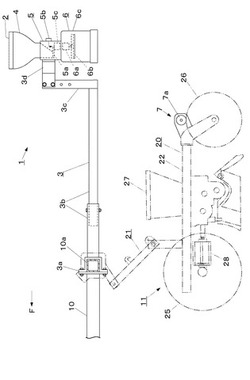
【課題】 播種機又は移植機に簡単かつ汎用的に取り付けることができるとともに、誤作動による薬剤の散布を防止することができるようにする。
【解決手段】 本発明の薬剤散布装置1は、播種機11の後側で圃場に薬剤を散布するものである。前記播種機11の鎮圧輪26の回転を検出する回転センサー7を備え、薬剤の散布停止中に、所定の開始待ち時間に亘って該回転センサー7が該回転を検出し続けると薬剤の散布を開始し、薬剤の散布中に、所定の停止待ち時間に亘って該回転センサー7が該回転を検出しないと薬剤の散布を停止するように構成されている。
(もっと読む)
目砂、肥料等の散布機

【課題】
水平に回転するローター上に目砂、肥料等を落下させて、このローターの回転により目砂、肥料等を円弧状に均一に散布することができる散布機を提供する。
【解決手段】
走行可能な台車と、その台車の後方に設けられた目砂、肥料等の散布材料を収容するホッパーと、このホッパーの下部出口を通ってホッパーから供給される散布材料を後方に搬送するコンベヤーと、このコンベヤーの終端下方に位置して水平回転すると共に、前記コンベヤーの終端から落下する散布材料を受け止めて放射方向に散布するローターとを備えた散布機において、前記ローターの上面側に半径方向に複数の上部フィンが設けられ、それらの上部フィンの間に開口部を設けるとともに、下面側に下部フィンを設けたことを特徴とする。
(もっと読む)
肥料散布装置及び肥料散布再開位置の設定方法
【課題】圃場の広さにかかわらず、肥料が切れた位置から肥料散布を再開する。
【解決手段】走行しながら肥料を散布する肥料散布部1と、肥料を貯留するとともに、肥料散布部1に肥料を供給する肥料貯留部10と、測位手段による位置情報に基づいて、肥料散布部1の位置情報を設定する位置情報検出部3と、肥料散布部1の肥料散布動作が停止したことを検出する散布動作停止検出部6と、肥料散布部1の肥料散布動作が停止したことを検出した時点の肥料散布部1の位置情報に基づいて、肥料散布再開位置を設定する肥料散布再開位置設定制御部C5とを備えた。
(もっと読む)
粉粒体散布装置
【課題】圃場において所定の作業が行われた既作業領域に対して適切に粉粒体を拡散放出させることが可能となる粉粒体散布装置を提供する。
【解決手段】繰出し手段から繰り出される粉粒体を打撃により飛散させる回転式飛散手段27と、その回転式飛散手段27により飛散される粉粒体を圃場に拡散放出すべく案内する案内手段59,60とを備えて構成され、圃場において所定の作業が既に行われた既作業領域Zを検出する既作業領域検出手段と、既作業領域検出手段の検出情報に基づいて、回転式飛散手段27により飛散され且つ案内手段59,60により案内される粉粒体の圃場に対する散布領域を既作業領域Zに対応させるように変更する散布領域変更手段SHとを備えて構成されている。
(もっと読む)
薬液散布装置
【課題】 薬液タンクを搭載して噴射ノズルを取り付けた走行車両が傾いても、噴射ノズルの角度変化を補正して、少ない労力で常に同じ散布パターンで薬液を芝生に散布することができる薬液散布装置を提供すること。
【解決手段】 走行車両9に搭載された薬液タンク91と、この走行車両9に取り付けられ、上記走行車両9の走行方向を回動軸としてモータ3により回動して薬液の噴射方向の仰俯角が変化する噴射ノズル1と、モータ3の正転、停止、反転を制御して噴射ノズル1の仰俯角を変えるための手動切換スイッチ5とを具備するものである。また、ロータリーエンコーダ6および錘63を用いて、散布ノズル1の水平面または垂直面に対する角度αの変化を検知して補正するように構成してもよい。
(もっと読む)
苗移植機
【課題】苗移植機の走行速度の変動があっても施肥装置から繰り出される肥料の繰出量が単位圃場面積当たりでほぼ一定になるようにした施肥装置を備えた苗移植機を提供すること。
【解決手段】車速センサ112により走行車体2の走行速度に基づき施肥装置5の繰出しロール73A,73Bの回転速度を肥料繰出電動モータ159により予め設定された変更量で変更することで、該回転体73A,73Bの回転速度が変わっても、回転体73A,73Bに供給される肥料の量を一定量に保つことができる。例えば車速が速くなると繰出しロール73A,73Bの回転が比例関係以上に遅くなり、該ロール73A,73Bが一度に排出する肥料の量が減少して肥料不足になることが防止され苗の生育が良好となり、車速が遅くなるとロール73A,73Bの回転が比例関係以上に速くなるように変更することで、ロール73A,73Bの回転速度を速くしてロール73A,73Bが一度に排出する肥料の量が増加して肥料が供給過剰になることが防止できる。
(もっと読む)
苗移植機
【課題】簡易な測定方法で精度良く一様施肥を実現することができる苗移植機を提供する。
【解決手段】圃場を走行する走行車体2と、この走行車体2に設けられ土壌に苗を植付ける苗植付部4と、この苗植付部4よりも走行車体2の前部に設けた施肥ガイド63から土壌に肥料を吐出する施肥装置5と、施肥ガイド63よりも走行車体2の前部に配置した左右の走行車輪10に設けられ土壌中に突入する左右一対の検出子71aと、これらの検出子71a間の通電抵抗または電気伝導度を検出して土壌の肥料濃度を検出する肥料濃度センサ71と、肥料濃度センサ71の検出データに基づいて施肥装置5の施肥量を変更する制御装置72と、土壌の温度を検出する温度センサ73とを備え、この温度センサ73の検出データに基づいて肥料濃度センサ71の検出データを補正する。
(もっと読む)
地図連携型施肥設計システム
【課題】 地図データと連携させて、肥料パターンや優先条件等の異なる施肥設計条件により、土壌や作物に適合した複数の施肥設計パターンを自動提示し、同一画面上で比較できるように表示するシステムを提供すること。
【解決手段】 地図上での圃場の指定を受け付け、肥料パターン及び優先条件等の施肥設計条件を受け付け、該圃場に対する施肥パターンを設計し、設計した施肥パターンを同一画面上に表示する手段を備えることを特徴とする。
(もっと読む)
散布機
【課題】 繰出ロールによってホッパーから繰り出される施用剤を、送風機から送風する噴送筒を通して搬送しながら、施用散布する散布形態にあって、この噴送筒の噴出口部に清掃作業等の送風ユニットを取付接続して付帯作業を行うときは、誤って繰出ロールを駆動すると、施用剤がこの送風ユニットから吹き出されて、機体の清掃箇所へ吐き出したり、機外へ排出されることになる。
【解決手段】 繰出モータMにより繰出ロール1を駆動回転してホッパー2の施用剤を繰出しながら、送風機4により噴送筒5を経て散布ブーム6へ噴送して散布する散布機において、前記噴送筒5に、噴風清掃用の送風ユニット12を接続することによって、前記ホッパー2の残留施用剤を取出し排出するための排出スイッチ3操作による繰出モータMの駆動出力を牽制する。
(もっと読む)
施肥機の肥料落下口の開閉シャッタ装置
【課題】PTO軸のクラッチを入・切する制御操作と、肥料の落下口を開閉作動させる制御操作とを、一方の制御操作を行えば、他方の制御操作が、連動して同時に自動的に行われるようにする。
【解決手段】施肥機の回転作動部に、回転数検知器Kを設け、その回転数検知器Kが、回転作動部の作動に適応する所定の回転数以上の回転数を検知したときに、シャッタプレートsを開とするよう電動モータMを正転側に作動させ、所定の回転数以下の回転数を検知したときに、シャッタプレートsを閉とする逆転側に電動モータMを作動さすよう、回転数検知器により電動モータMを制御せしめる。
(もっと読む)
施用装置付き移植機
【課題】畝内の薬肥粒剤が施用されている部位に適切に苗株を植付けることができる施用装置付き移植機を提供する。
【解決手段】施用装置付き移植機は、圃場走行可能に支持した機体に歩行操作用の操縦ハンドル(8)を設けるとともに、苗株を圃場に植付ける苗株植付装置(3)と薬肥粒剤を圃場に施用する薬肥粒剤施用装置(5)とを装荷して構成され、上記薬肥粒剤施用装置(5)は、苗株植付装置(3)より前方位置で、薬肥粒剤をタンクから定量繰出しする繰出部(31)と、その繰出し薬肥粒剤を土壌中に攪拌するための攪拌部(32)とを設けることにより、施用部位への確実な苗株の植付けを可能とするものである。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
可変散布装置
【課題】GPSからの速度情報が得られない場合にも常に車速を正確に知ることができる散布装置を提供すること。
【解決手段】GPSから位置情報と速度情報を受信するGPS受信機78によりGPSから速度情報を得て、車速センサ37から車輪4又は5の回転数を検出し、両方の速度情報に基づき肥料散布装置1による肥料散布量を算出し、GPS速度情報が得られないときには、車速センサ37で得られる車速に基づき車速を算出して肥料散布量を決める乗用管理機である。そして肥料などの散布途中でGPSからの車速データが得られなくなっても、車速データを補正しながらスリップの影響が少なく精度良い散布作業を継続できる。
(もっと読む)
肥料散布制御装置
【課題】施肥作業中にオペレータが最も知りたい走行速度値、又は回転軸の回転数値を表示する。
【解決手段】肥料散布装置Bの走行速度、所定面積当たりの肥料散布量、肥料の物性を含む作業環境値を設定するとともに、記憶し、該作業環境値の設定後、記憶された走行速度設定値を読み出して表示する。
(もっと読む)
粉粒状物散布装置
【課題】噴出量が大小に変化してもこれに容易に対応させて圃場全体に散布しようとする。
【解決手段】搭乗座席7を備えた乗用型走行機体に、粉粒状物を収容する左右一対のタンク10を設け、該左右のタンク10,10夫々の下方に、左右方向の軸心回りに回転してタンク10内の粉粒状物を下方の通気筒30に繰り出す繰出ロール20a,20b,20cを設け、該通気筒30に第1噴管13を接続し、第1噴管13に蛇腹管40を介して揺動自在に第2噴管14を接続した粉粒状物散布装置において、前記第1噴管13、及び第2噴管14に噴口32,50を設け、これらの噴口32,50には、噴風によって搬送される粉粒状物の一部に作用して吐出する粉粒状物を機体中央側に向けて案内する衝突板33,51を設けると共にその作用高さを調整可能に設けてなる
(もっと読む)
散布機
【課題】散布する容器内の内容物の残量をより的確に知ることができるトラクタに装着する散布機を提供することを目的とする。
【解決手段】演算処理部1は、開度xによって表される単位時間あたりの散布量の関数S(x)の情報を有し、センサー5からの情報に基づき開度xを算出し、投入量設定スイッチ3の操作による情報から初期量Cを決定し、タイマー4に開度xである間の時間Tをカウントさせ、残量Zを、Z = −S(x) × T + Cによって計算し、表示部2に表示させることにより上記課題を解決する。
(もっと読む)
散布機
【課題】適切な散布作業ができる散布機を提供する。
【解決手段】散布機1は、トラクタの走行により圃場を移動しながら被散布物を圃場に散布する。散布機1は、機体2に取り付けた収容体と、回転して収容体からの被散布物を散布する散布体11とを備える。散布体11の周囲には覆い体16を設け、この覆い体16は覆い体用シリンダ21の作動によって回動する。この覆い体16の回動により、被散布物の散布方向が機体の移動方向に対して左右に変更可能になっている。
(もっと読む)
粒状物の散布装置
【課題】第2噴管が機体進行方向に対して直交する方向に向いている場合と斜めに向いている場合で単位面積あたりの粒状物の噴霧量が同一となるようにした散布装置を提供すること。
【解決手段】タンク10内の粒状物(肥料など)を圃場に散布する機体左右の第2噴管14L,14Rを、傾斜角度変更する手段45,46により左右に延びた姿勢から前方向又は後方向に機体の真横から傾斜させ、少なくとも粒状物設定散布量と車速と第2噴管14の機体進行方向に直交する方向からの傾斜角度πから粒状物の繰出装置11の繰出ロール20の回転数を制御部15で算出する散布装置であり、畦までの距離が短くなると、第2噴管(ブーム)14を前記傾斜角度πの変更によって畦内側に寄せると共に、その角度変化を検出して粒状物繰出量(散布量)を制御することにより、散布過多をなくして適正量の粒状物を散布できる。
(もっと読む)
粉粒状物の散布装置
【課題】粉粒状散布機の噴管の水平制御において、過剰な上下動やハンチングの防止を図る。
【解決手段】傾斜センサ64の検出値mに基づき左右噴管14L,14Rを夫々水平姿勢とする噴管角度を算出し、算出噴管角度θ1L,θ1Rを制御目標値として前記左右のアクチュエータ48L,48Rを作動すると共に、前記傾斜センサ64による検出値mが予め設定した所定角度αを超えると、左右噴管14L,14Rの噴管角度を左右噴管14L,14Rの先端側が上向く一定角度βを制御目標値として前記アクチュエータ48L,48Rを作動する制御部15を設けた。または角速度センサ64による検出値ωが予め設定した所定角速度値γを超えると、左右噴管14L,14Rの噴管角度を左右噴管14L,14Rの先端側が上向く一定角度δを制御目標値として前記アクチュエータ48L,48Rを作動する
(もっと読む)
粉粒状物の散布装置
【課題】乗用型管理作業車等に搭載する粉粒状体散布装置に係り、タンク残量を適正に判定して作業ロスを極力少なくしようとする。
【解決手段】走行機体2に、粉粒状物を収容するタンク10と、繰出ロール20を有する繰出装置11と、 単位面積当りの散布量を設定する散布量設定手段63と、 前記設定散布量情報及び走行機体の車速情報に基づき前記繰出ロール20の繰出回転数を算出するコントローラ15と、この繰出回転数に基づき前記繰出ロール20を駆動する駆動手段25とからなる粉粒状物の散布装置を搭載し、前記コントローラ15には、前回の機体旋回動作から今回の機体旋回動作までの単位行程の繰出ロール20の繰出量とタンク10内残量とを比較する手段を設け、該比較結果に基づいてタンク10内の残量が前記単位行程における繰出ロール20の繰出量よりも少ないときに報知する報知手段70を設ける。
(もっと読む)
1 - 20 / 33
[ Back to top ]