
Fターム[2B075AB10]の内容
収穫機本体(特定作物用) (1,318) | 収穫機に結合した装置 (73) | その他 (41)
Fターム[2B075AB10]に分類される特許
21 - 40 / 41
刈取り用アタッチメント
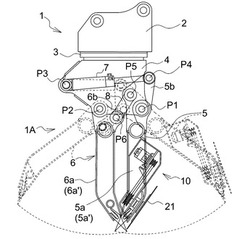
【課題】 この発明は油圧ショベルの作業用アームの先端に取り付けられて、さとうきび等を刈り取る刈取りアタッチメントに関する。
【解決手段】左右一対の爪部を有する一対のグラップルフォークを対向させて開閉し被刈取り物を把持しうるグラップル本体と、前記一方のグラップルフォークに形成された左右一対の爪部の間に設けられた刈取りカッタ装置とからなり、該刈取りカッタ装置のブレードが、前記一方のグラップルフォークの外面側で前記左右一対の爪部先端部の間に突出してなることを特徴とする.
(もっと読む)
乗用型茶園管理機

【課題】 効率よく剪枝と薬液散布を行なうことができる装置を提供することを課題とする。
【解決手段】 茶畝を跨いだ門型の機体を茶畝に沿って走行させる走行機体と、刈刃で枝葉を摘採し、刈刃の前方に設けた送風管から強風を吹き出して、摘採した枝葉を刈刃後方の畝間に枝葉を刈落とす剪枝装置と、茶畝へ向けて薬液を散布するために刈刃の後方に設けた薬液散布装置とより構成する。
(もっと読む)
植物の葉の採葉機
【課題】植物の葉の採葉機を提供する。
【解決手段】所定長さの枝の先端部を把持し定速度で移動する枝移動手段と、該枝移動手段と水平方向で任意の角度にて取り付けられ、前記枝を把持して前記枝移動手段と実質的に等速に移動し、枝の先端部から元部へ葉をしごき落とす葉分離手段と、から構成される。そして枝移動手段は、枝を支持する支持部と、該支持部上を接触又は近接して走行する無端状部材とから構成され、葉分離手段は、上下一対のチェーン部材からなる無端機構と、該チェーン部材に一定間隔にて取り付けられた接触小片から構成される。
(もっと読む)
果樹の育成方法
【課題】煩雑な作業によらず果実が地面に接触するのを抑制できる果樹の育成方法を提供する。
【解決手段】果実(マンゴー4)が生る果樹(マンゴーの木1)の育成方法において、マンゴーの木1の高さ方向に、マンゴーの木1の幹の周囲からマンゴーの木1の幅方向の範囲に渡り、完熟状態の果実よりも網目が小さい平面状の第1のネットを複数段配置する。
(もっと読む)
カット野菜収穫方法とカット野菜収穫機
【課題】 野菜の葉の部分を自動的にカットする機械がないため、葉のカットに多くの労力と手間がかかり生産性が悪くコスト高になっていた。
【解決手段】 本発明の野菜切断方法は、野菜が生育している栽培パネルの搬送中に野菜の根よりも上方部分をカットし、カットされた野菜を風で送って回収するようにした。野菜を切断刃側に押して栽培パネルの搬送方向最後列の野菜まで切り残しなくカットできるようにすることも、栽培パネルの外側に傾斜或いは倒れている野菜を内側に寄せてそれら野菜を切り残しなくカットできるようにした。本発明のカット野菜収穫機は搬送体と、切断刃と、カット野菜を回収体に送る回収風を噴出用の回収風噴出体と、野菜を切断刃側に押す追い風噴出用の追い風噴出体と、搬送中の栽培パネルの外側に傾斜或いは倒れている野菜を内側に寄せる側方ガイドを設けた。切断刃の高さを調節できるようにした。
(もっと読む)
果実収穫装置及び果実収穫方法
【課題】収穫対象以外の果実による影響を受けることなく収穫対象果実を収穫することが可能な果実収穫装置を提供する。
【解決手段】収穫対象のイチゴを吸引して、位置を固定する吸引部14と、収穫対象のイチゴに隣接する隣接イチゴに対して、気体を吹き付けて、隣接イチゴを収穫対象のイチゴから離間させる第1気体噴出口126a、第2気体噴出口126b、第3気体噴出口126cと、位置が固定された収穫対象のイチゴを把持する第1フィンガー部24A、第2フィンガー部24Bと、を備える。
(もっと読む)
植物掘起し装置
【課題】
掘起した作物の残幹や残根の掘り起こしと同時に畝を崩して畝溝を埋め、畝溝に植生する雑草を埋没させると共に残幹や残根を回収できる植物掘起し装置を提供することを課題とする。
【解決手段】
進行方向に対して左右方向姿勢の回転軸23を中心として回転する左右支持部材22,22を設け、左右支持部材22,22の間に植物の残幹Tを圃場から掘り起こす複数の掘起し体27を設けた植物掘起し装置において、回転軸23の中心部から機体外側方向に畝を崩して畝溝に土を排出する左右螺旋体28a,28bからなる排土部材28を設けると共に、複数の掘起し体27に残幹Tを後方に案内する排土部材28よりも大径の左右案内部材29,29を設けて構成する。
(もっと読む)
油圧制御装置
【課題】 アクチュエータをオペレータの要求どおりに複合操作することができる油圧制御装置を提供する。
【解決手段】 油圧ポンプPを接続するポンプ通路4と、このポンプ通路4に吸入側を接続したアクチュエータたる油圧モータMと、この油圧モータMの排出側に接続した排出通路5と、この排出通路5に切換弁7a〜7cを介して接続した1または複数の他のアクチュエータ1〜3とを備え、上記油圧ポンプPからの吐出油によって上記油圧モータMを回転させるとともに、この油圧モータMから排出する排出油によって、他のアクチュエータ1〜3を作動させる。
(もっと読む)
果実収穫ロボット
【課題】
狭い栽培棚間でも確実に果実を検出し、果実を傷つけることがなく、且つ簡潔な構成の果実収穫ロボットを提供することを課題とする。
【解決手段】
果実の有無及び果実までの距離を検出する検出装置37と、収穫する果実が収穫可能かどうかを識別する識別装置49と、該識別装置49の識別結果にもとづいて果実を収穫するマニピュレータ45とからなる収穫装置Bを前後左右上下方向に移動自在に設けると共に、該収穫装置Bにて収穫した果実を回収する回収部Cを設け、マニピュレータ45で収穫した果実を把持したまま収穫装置Bを回収部Cへ移動させ、マニピュレータ45で把持している果実の把持を解除して回収部Cに投入させる制御装置53を設ける構成とする。
(もっと読む)
結球野菜収穫機
【課題】本発明は、収穫後の洗浄作業などの余計な手間を要せず、所望の位置で確実に切断して収穫すると共に収穫作業の効率化を図ることができ得る簡易な構造の結球野菜収穫機を提供することを目的とする。
【解決手段】本発明の結球野菜収穫機は、走行車体に、畝に植生する結球野菜の結球部を挟扼する案内装置と、案内装置により挟扼された結球野菜を切断して結球野菜の外葉と結球部とを分離する回転刈刃を有する切断装置とを設け、前記案内装置を前記走行車体の前方で前記畝に沿って前低後高状に配置した左右の案内ロッドにより構成し、この左右の案内ロッドにより畝の頂面の直上で両案内ロッドの間が狭くなる狭隘部を形成すると共に前記回転刈刃を前記狭隘部の後下方で畝の直上に配置したことを特徴とする。
(もっと読む)
走行型茶葉摘採機
【課題】 走行型摘採機の摘採装置から収葉コンテナへの接続を合理化し、収葉コンテナの収容能力を増大させることと、収葉コンテナからトラック上に設けた搬送用コンテナへの茶葉の載せ替えを合理化して、重心の低い、軽量で、安価な機体を提供する。
【解決手段】走行型摘採機の摘採装置に接続された収葉コンテナの後壁をコンベヤ型の無端輸送帯で構成し、茶葉の排出を行う。
(もっと読む)
作物運搬車
【課題】
作物の収容台車への積み込みが容易であり、収容台車が車体上から脱落しにくく、且つ走行するための条の作物を手作業で収穫する必要の無い作物運搬車を提供する。
【解決手段】
圃場から収穫した作物を収容する機枠22F,22Rに包囲体29を設けて構成する台車31を走行車体1上に設けた作物運搬車において、該台車31の包囲体29の一辺に車体の外側又は内側に回動自在な第1主壁部材25Fを設け、該第1主壁部材25Fに車体の外側又は内側に回動自在な第2主壁部材27Fを設け、前記第1主壁部材25Fに第1固定部材26L,26Rを設けると共に、前記第2主壁部材27Fに第2固定部材28L,28Rを設けて構成する開閉壁29Fを設けて構成する。
(もっと読む)
農作業用低床型腰掛台車
【課題】農作業で平地に植付及び収穫するらっきょう等は平地での手先作業のため、低くしゃがむかビールビンケース等に腰掛けて作業している。しゃがんで作業及び移動の繰返しにより足首、膝及び腰が痛くなる。ビールビンケース等に腰掛けての作業は平地からの高さにより背中を丸めて作業となり背中を痛める。又ケースの接地圧により平地を荒らすので均しながらの作業となる。
【解決手段】キャタピラ台車として腰の位置を低くし背中を丸めての作業をなくする。前後移動時は少し腰を持上げ足で地面を蹴っての移動となる。腰持上げ時空気圧封入シリンダ4a〜4dの上昇力が働くため足、膝及び腰に掛かる体重負担が少なくなる。
地面に掛かる体重負担は腰掛フレーム8、下部フレーム7、キャリヤロール2a〜f及びキャタピラベルト1より伝達となる。ベルト面積が広いため体重による接地圧は低く平地を荒らすことはない。
(もっと読む)
農作業用昇降竹馬
【課題】農作業の果実(りんご、なし、柿、みかん等)栽培で背丈以上の高さの作業、例えば袋掛及び収穫等の時、足場として脚立を使用している。脚立の場合、手の届く範囲が狭いので、いちいち脚立に上がったり、下りたり、セット変えしたりで面倒である。そのため少々無理な姿勢でも作業しようとするため転倒の危険がある。
【解決手段】背丈以上の作業高さで簡単に昇降可能とするため、足台22をブレーキ付ギヤードモータ13により駆動されるボールネジ12で昇降する昇降外筒10に取付けている。竹馬に乗った状態で操作ボタン4a、4bを操作し、上下方向の作業範囲を広げることが出来る。ブレーキ付ギヤードモータはバッテリ電源18で駆動としているので、どこでも操作可能である。場所移動は昇降ガイド外筒30を持って、足台を持上げて竹馬として移動可能なため、場所移動が簡単である。一対の竹馬はチエインで結合されているため安全性も計れる。
(もっと読む)
茎葉収穫機
【課題】
茎葉を収穫する姿勢を安定させ、効率よく収穫作業を行うことができる茎葉収穫機を提供することを課題とする。
【解決手段】
第1に、機枠6に走行装置1L,1Rと左右引起こし装置42と収穫した茎葉を機体後方に搬送する搬送装置Fとを備えた茎葉収穫機において、該左右引起こし装置42を機枠6の左右前側に各々独立して上下方向に回動自在に設けた左右支持部材26の前部に設け、該左右支持部材26を上動方向に付勢する左右バネ部材30を左右支持部材26と機体6側との間に設けると共に、左右引起こし装置42の下部に左右接地部材36を設け構成する。
第2に、機枠6側に基部を装着した左右リンク装置28を左右アクチュエータ31によって上下動自在に設け、該左右リンク装置28と左右支持部材26とを左右各々遊動機能を有する左右連結部材66で連結して構成する。
(もっと読む)
収穫ロボット
【課題】 果菜類の果実の色や形状に限定されることなく、収穫適期の果実を収穫することができる収穫ロボットを提供すること。
【解決手段】 果実を照明する照明装置、及び平行に設置された2台のカメラを備えた撮影手段と、摘み取り装置と、移動装置と、2台のカメラによって夫々撮影されたアナログの画像情報を取得してデジタル変換する画像入力ボード、該画像入力ボードがデジタル変換した画像情報を処理する画像処理アプリケーション、並びに、該画像処理アプリケーションにて処理された画像情報に基づいて前記撮影手段、摘み取り装置及び移動装置を制御する制御手段とを備えた画像処理手段とで構成され、前記画像処理アプリケーションは、デジタル変換されたカラー画像データをHSI値に変換して二値化し、その二値化によって絞り込んだ果実の領域から特徴量を判別することを特徴とする収穫ロボットとする。
(もっと読む)
葉菜類の播種方法と播種機、ならびに収穫方法
【課題】葉菜類の播種方法と播種機、ならびに収穫方法を提供する。
【解決手段】本発明による播種方法を実施する播種機は、移動可能な機枠に前ローラ5、テープローラ3、後ローラ4がこの順に配置されている。種子供給部は、前ローラ5とテープローラ3間に設けられている。テープリール2は前記テープローラ3にテープ11を供給する。覆土手段は前記テープ11の全部または一部を覆土する。収穫はテープ11の引き上げにより行われる。
(もっと読む)
球状農作物の把持機構
【課題】 ゴム材で細長風船状に形成された複数本のフィンガーを備え、フィンガー内部への圧力流体の供給によってフィンガーを内向きに屈曲変形させるよう構成した球状農作物の把持機構において、補強糸を合理的に巻き付け装着して、耐久性を低下させることなくフィンガーを適切に屈曲作動させて球状農作物を良好に把持することができるようにする。
【解決手段】 フィンガー12の外向き周面に、フィンガー長手方向に略等ピッチで屈曲する蛇腹部25を形成するとともに、フィンガー12の内向き周面に、蛇腹部15の外向き山部15aに対向する複数の横長凹入溝26を並列形成し、蛇腹部25の外向き谷部25bと横長凹入溝26に亘って、フィンガー12の内向き周面より突出しない太さの補強糸27を一連に巻き付け装着してある。
(もっと読む)
葉菜または豆果の収穫方法および収穫装置
第1コンベア(30)と刈取ステーション(40)との間の隙間(82A)にトレー(10)を支持する固定板または格子(82)が配置されている。刈取ステーションにおける刈取装置は板または格子(82)の上方で高さを調整できる。装置を使用した葉菜および豆果の収穫方法も開示されている。  (もっと読む)
(もっと読む)
ダメージ防止機能または丁重な取り出し機能を有するデリケートなまたは傷付きやすい品物用の運搬バッグ
本発明は運搬バッグに関し、これはその中の中身を損傷させることなく取り出すことを可能にする。これは、互いにフレキシブルに連結された異なる部品によって、そして特別な連結手段と共に両方の可動要素を持つ側壁によって可能となっている。運搬バッグはストラップによって肩に掛けることができ、しかも特に、デリケートな品物を運搬し、かつとりわけそれを取り出すのに適する。 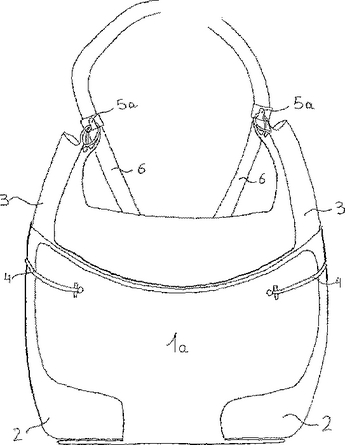 (もっと読む)
(もっと読む)
21 - 40 / 41
[ Back to top ]