
Fターム[2D129CA13]の内容
Fターム[2D129CA13]の下位に属するFターム
Fターム[2D129CA13]に分類される特許
1 - 20 / 49
ドリリングバケット及びドリリングバケットを用いた掘削方法

【課題】過大な駆動装置や複雑な動力変換機構などを必要とすることなく、1回の最大掘削量を増やすことが可能なドリリングバケットを提供する。
【解決手段】ドリリングバケット100は、本体バケット10と、本体バケット10に内蔵され、本体バケット10内で昇降可能に構成された内部コンテナ20とからなる。本体バケット10は、円筒形の胴体部11と、胴体部11の底部に開閉自在に設けられた底蓋12と、底蓋12に形成された開口部13とを備える。内部コンテナ20は、胴体部11よりも小径の円筒形の胴体部21と、胴体部21の底部に開閉自在に設けられた底蓋22と、底蓋22に形成された開口部23とを備える。内部コンテナ20が最下降位置に位置する状態において、開口部13から取り込んだ土砂を開口部23まで誘導する誘導板50が設けられている。
(もっと読む)
杭打機

【課題】回転駆動装置の形式、リーダの形式や長さ、施工部材の変更などにも容易に対応することができる制御手段を備えた杭打機を提供する。
【解決手段】リーダ16に沿って昇降する回転駆動装置18によって施工部材を回転させながら地中に圧入する杭打機11において、リーダにおける回転駆動装置の昇降位置を検出する位置検出手段と、回転駆動装置の形式、リーダの形式及び長さ、施工部材の形式をあらかじめ設定する作業条件設定手段と、位置検出手段で検出した回転駆動装置の昇降位置、作業条件設定手段に設定された作業条件及び回転駆動装置に設けられた駆動源の形式に基づいて回転駆動装置から施工部材に与えるトルクの制限値を演算する制御手段とを備えている。
(もっと読む)
削岩リグおよびその位置決め方法
土壌内に水平孔を準備するための方法および水平削孔装置
水平削孔装置を運転するための方法および水平削孔装置
ハンマーグラブ制御システム
【課題】2つのシェルが固有のシリンダ機構にて姿勢制御されるハンマーグラブの制御システムに関し、簡易な構造で、各シェルのスムースで継続的な姿勢制御を保障することのできる、ハンマーグラブ制御システムを提供する。
【解決手段】制御システム200は、第1、第2、第3のシリンダ機構10、20、30と、これらの機構を構成するシリンダ内でピストン12,22,32にて分割された各第1の領域を流体連通する第1の流路系40、各第2の領域を流体連通する第2の流路系50と、第1、第2のロッド13,23に装着されたシェル61,62から構成されたハンマーグラブ60と、からなり、さらに、第2の流路系50に流体連通する第3の流路系90を介して第4のシリンダ機構80を備え、ハンマーグラブ60の姿勢制御の際に各ピストン12,22,32を進退させる際に不足する量の流体が第4のシリンダ機構80から提供されるようになっている。
(もっと読む)
海底地下探査掘削機
【課題】海底に着底して、小さい掘削機を用いて細いロッドで掘って、地底探査する為の機械を提供する。
【解決手段】大きなプラットホーム〔搾油リグ〕を建てて海上から、太いロッドで掘下げ、かつ掘削機は小さいものを使い、海底に潜水して掘る為に、ロッドのグリップ方法をブルドーザのキャタビラー形で掘削機に適用すると共に、海底で長期作業する為に海底の海水圧に耐え、燃料、酸素を補給が行えるようにしたデーゼルエンジン127を使用する。
(もっと読む)
ハンマーグラブ制御システム
【課題】ハンマーグラブの回転を制御すて、油圧配管チューブ等の捩じれ破損を防止するハンマーグラブ制御システムを提供する。
【解決手段】筒状基枠10に、地盤中に打ち込まれるケーシングCの中心部側から半径方向に進退移動可能で、ケーシングC内周面に圧接し筒状基枠10をケーシングCと一体化するプッシャー31を有するスタビライザー13を一体的に設け、スタビライザー13に一体的に連結する内軸体14aと回転可能に外嵌された外筒体14bとからなるスイベル機構14を有し、スイベル機構14の外筒体14bに吊り下げ接続部5を設けたハンマーグラブH1において、伝動機構を介してスイベル機構14の外筒体14bを回転駆動するモータ3と、ハンマーグラブH1の回転時に発生する外筒体14bの周方向のねじれ角を補正し、モータ3の回転を制御して外筒体14bをねじれ前の位置に復帰させるモータ制御装置4を有する。
(もっと読む)
地盤施工機およびその工具駆動制御方法
【課題】複数の変速段から最適な変速段を自動的に選択して工具を安定的に回転駆動することのできる地盤施工機およびその工具駆動制御方法を提供する。
【解決手段】回転駆動される工具と、可変容量の油圧モータを複数備えた駆動部8と、油圧モータに供給される流体の供給側と排出側の圧力差を検出するための検出器86,87と、駆動部の複数の変速段のいずれかを自動的に選択して駆動部を駆動制御する駆動制御部80とを有し、駆動制御部は、圧力差によって変速段の選択を行うものであり、変速段移行のための圧力差の基準値と基準時間とがそれぞれの変速段移行に対して設定されており、圧力差が変速段を低速側に移行するための基準値以上である状態が基準時間以上連続した場合に、変速段を低速側に移行するものであり、圧力差が変速段を高速側に移行するための基準値以下である状態が基準時間以上連続した場合に、変速段を高速側に移行するものである。
(もっと読む)
発破穿孔さし角制御システム
【課題】少ないセンサで穿孔さし角を制御し、発破効率の向上、余掘りの低減を実現することができ、汎用性が高く、コスト削減が可能な発破穿孔さし角制御システムを提供する。
【解決手段】穿孔始点設定手段によって設定した穿孔始点位置でブーム14に支持されたガイドセル18上を平行に稼動する穿孔機16を用いて穿孔を行う際の発破穿孔さし角制御システムであって、ブーム14に取り付けられてブーム14の水平角を検出することでガイドセル18の水平角を検出する水平角検出センサ34、36と、ブーム14に取り付けられてガイドセル18の鉛直角を検出することでガイドセル18上を平行に稼動する穿孔機16先端の鉛直角を検出する鉛直角検出センサ38とを有し、水平角検出センサ34、36により検出された水平角と、鉛直角検出センサ38により検出された鉛直角とに基づいてガイドセル18上の穿孔機16先端の穿孔さし角を設定可能とされている。
(もっと読む)
支柱又はパイルを設置する方法及び装置
支柱又はパイルを支持面に直立した状態で設置する方法において、設置しようとする支柱又はパイルを支持船から降下せしめて前記支持面と接触せしめる段階と、前記支柱又はパイルの下方又は足端をドリルとして用い、前記支柱又はパイルの回転により穴を前記支持面に形成し、前記穴の中に前記支柱又はパイルの下方部分を設置する段階と、穴あけ作業の完了の後に前記支持面に形成した前記穴の現場に前記支柱又はパイルを残しておく段階とを包含する。 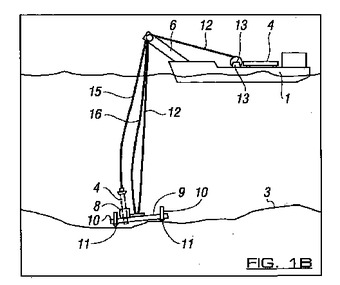 (もっと読む)
(もっと読む)
杭施工機
【課題】絞り込み機構を備える杭施工機において、絞り込み機構非作動時に掘削ロッドの貫入速度が速まったり、掘削ロッド引き抜時の速度が低下したりしても、絞り込み用索体が弛んで滑車から外れたり、周囲の部材に絡まったりせず、常に正常な作動を確保出来る方法の提供。
【解決手段】リーダに取り付けられたオーガマシン3とリーダー基部1aとの間に、滑車を介してワイヤー4Bが巻き掛けられ、これを絞り込む機構Sを具備する杭施工機Mにおいて、ウエイト7がワイヤー4Bの途中部分に昇降自在に吊持され、ウエイト7の高さを第一基準位置L1で検知するリミットスイッチ9Aと、ウインチドラム6Bの回転速度を制御する制御装置19とを備える。ウインチドラム6Bは、掘削ロッドの貫入時には、ウエイト7が基準位置L1まで下がった際に巻取り速度を速め、引き抜き時にはウエイト7が基準位置L1まで下がった際に巻出し速度を遅らす。
(もっと読む)
削岩リグにおける方法および装置
削岩リグ(1)に削岩機(6)が設けられ、削岩機は、衝撃装置(4)と、送り装置(9)と、削岩用ドリルビット(8)を端部に備えたツール(7)とを有する。衝撃装置は応力波をツールに対して発生し、ここからさらに、被掘削岩盤に対して発生するよう配設されている。掘削中、ツールに対して発生した圧縮応力波(σi)の少なくとも一部は、岩盤から反射されて応力波(σr)としてツールへ戻る。本方法では、岩盤から反射されてツールへ戻る応力波(σr)の運動量(Pr)を求め、衝撃装置の作動および/または送り装置の作動を運動量に基づいて調節する。 (もっと読む)
掘削部材およびその掘削部材が固定された試錐管
【課題】
地中に存在する岩石に掘削部材が突き当たった場合でも、掘削部材によって岩石を確実に粉砕または掘削して掘削作業を円滑に行うことができる掘削部材およびその掘削部材が固定された試錐管を提供すること。
【解決手段】
地中に貫入される試錐管9の先端部に掘削部材24が固定される。試錐管9にその軸芯に沿う方向に衝撃力を繰り返し付与することで地中を掘削して地面に穴を穿つ。掘削部材24の先端側の部分がその先端に向かうほど階段状に先細りになるように形成され、かつ、前記先端の部分が超鋼部材34で構成されている。
(もっと読む)
油圧ブレーカーアセンブリー
本発明の油圧ブレーカーアセンブリーは、ケーシングの内側にヘッドキャップ、シリンダー及びフロントヘッドが装着される油圧ブレーカーアセンブリーであって、前記ケーシングに内蔵されるフロントヘッドとシリンダーの相互に対応する面が複数の連結ピンで連結され、前記シリンダーとその上部に位置するヘッドキャップが複数の締結ボルトで固定され、前記フロントヘッド、シリンダー及びヘッドキャップの外側に結合する一つ以上の可変ダンパーによって前記フロントヘッド、シリンダー及びヘッドキャップがケーシングの内側に支持される。よって、ケーシングの内側での遊動が防止され、ヘッドキャップ、シリンダー及びフロントヘッドの結合が堅固になされ、ボルトの長さを短くして衝撃発生部を最小化することで、ロッド打撃の際のねじり応力からボルトを保護して耐久性を高めるものである。 (もっと読む)
掘削装置、スロット掘削方法およびスロット形成装置
削岩装置(1)で使用され、平行に交差する複数の穴を互いに近接して穿孔し、岩盤、石造建築もしくはコンクリートなどの脆性材料にスロットを形成するスロット形成装置(100)。スロット形成装置(100)は、少なくとも1つの支柱(130)によって本体部(120)へ連結されたガイド部(110)を有する。ガイド部(110)は前に穿孔した穴(50)内に配置され、本体部(120)および回転式衝撃ツール(7)が互いに可変容量チャンバ(140)を画成し、これにはフラッシング流体を入れて、削岩装置(1)の衝撃装置(4)からスロット形成装置(100)への衝撃応力波の伝播を減衰させる。 (もっと読む)
海底ドリルシステム及びドリルシステムの操縦方法
海底ドリルシステムは、水の中又は外で取外し可能且つ交換可能なツールカルーセルを有するドリルモジュールと、スキッドモジュールと、及び水の中又は外で前記スキッドモジュールと接続及び切断されるROVとを備え、該ROVは、前記海底ドリルシステムを作動するため用いられる。海底ドリルシステムを作動させる方法は、水の中又は外で、ツールカルーセルをドリルモジュールから取外して該ツールカルーセルを他のツールカルーセルに交換するステップを含む。ROVは、水の中又は外で、スキッドモジュールに接続され、前記スキッドモジュールから切断される。前記海底ドリルシステムは、前記ROVを用いて作動させられる。 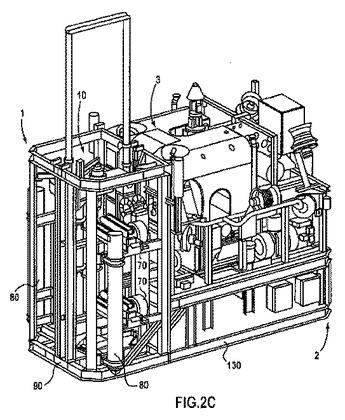 (もっと読む)
(もっと読む)
掘削翼拡縮装置
【課題】掘削翼の拡縮動作を確実に行うとともに、修理、メンテナンス作業を容易に行うことができ、しかも掘削翼の拡縮状態が地上で容易に確認することができるようにする。
【解決手段】回転軸11の上部に設けられる拡縮操作部30と、回転軸11の外側に配され拡縮操作部30の作動により上下動操作される一対の連結ロッド19と、各連結ロッド19の下端部に連結される掘削翼16とを備え、拡縮操作部30が、回転軸11の外周面に取り付けられる一対の油圧シリンダー32と、一対の油圧シリンダー32の作動を同調させる同調機構部(同調ブラケット35等)とを有し、各油圧シリンダー32のシリンダーロッド33先端に各連結ロッド19を連結することにより各連結ロッド19を同時に上下動させる。
(もっと読む)
アースドリル
【課題】拡底孔を掘削中の拡底翼の開度を簡単な構造で確実に知ることが可能な拡底翼開度検出手段を備えたアースドリルを提供する。
【解決手段】ケリーバ駆動装置19の下部に設けられてケリーバ17が昇降可能に挿通された状態でケリーバと一体に回転する回転テーブル20に、油圧モータにて駆動されるケーブルリール37を設け、該ケーブルリール37に巻回されたケーブル34の先端を、拡底バケット21の拡底翼25を拡縮作動するスライダ28に接続するとともに、ケーブルリール37の回転をロータリーエンコーダで検出してケーブルの移動量を検出することによって拡底翼の開度を算出する。
(もっと読む)
モジュラコネクタおよびその使用方法
第1モジュールと、第2モジュールと、これらの両モジュールを連結する1つ以上のコネクタとを有する地下地層に使用するモジュラツール。より詳しくは、第1モジュールは、ツールの外部の少なくとも一部を形成する第1カラーと、該カラーの第1端部の第1係合機構と、カラーの第2端部の第2係合機構とを有している。第1モジュールはまた、掘削流体を通す流体通路を有している。第2モジュールは、同様な構造を有する。1つ以上のコネクタは、ツールの外部に流体的に連結された少なくとも1つのフローラインと、モジュール間で電力及び/又はデータを伝送する電気的通路の連結を促進する。 (もっと読む)
1 - 20 / 49
[ Back to top ]