
Fターム[2F051AB04]の内容
特定の目的に適した力の測定 (5,882) | 力の検出手段 (2,017) | 音響的 (96)
Fターム[2F051AB04]に分類される特許
1 - 20 / 96
油圧式トルクレンチの締付力の制御装置
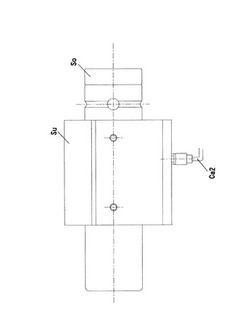
【課題】超音波探触子を用いて締結部材の締付力の測定を行うようにするとともに、そのための電気的な接続機構を簡易に構成し、かつ、メンテナンスを容易に行うことができるようにした油圧式トルクレンチの締付力の制御装置を提供すること。
【解決手段】主軸Sの先端部に着脱可能に配設したソケットSoに超音波探触子Seを配設し、この超音波探触子Seから導出したケーブルCa1をソケットSoに配設したピン形状の電極E1に接続し、この電極E1と、ソケットSoの外周部に配設したソケットSoを回転可能に支持する支持体Suに配設した円環状の電極E2とを摺接させることにより電気的に接続し、支持体Suに配設した電極E1をケーブルCa2を介して外部のコントローラCon1、Con2、Con3に接続する。
(もっと読む)
帯状体の張力分布測定装置

【課題】密度の低い帯状体や板厚の薄い帯状体であっても、張力分布を精度よく測定できる張力分布測定装置を提供することである。
【解決手段】長手方向の2箇所の部位で支持ロール2a、2bに支持された帯状体1に振動荷重を負荷する振動荷重負荷手段3と、振動荷重負荷手段3によって生じる振動変位を、帯状体1の幅方向の複数の計測点1aで計測する変位計4とを設け、各変位計4で計測された振動変位から求められる帯状体1の固有振動数および振動モードと、支持部位間での帯状体1の質量と、支持部位間で帯状体に接する流体の付加質量とから、帯状体1の張力分布を演算して測定することにより、密度の低い帯状体や板厚の薄い帯状体であっても、その振動に影響する周りの空気の付加質量を考慮に入れて、張力分布を精度よく測定できるようにした。
(もっと読む)
超音波探触子用アタッチメント
【課題】ボルト軸力を正確に測定することができ、しかも、その測定作業を容易に行うことができるようにする。
【解決手段】本発明の超音波探触子用アタッチメント(1)は、ボルトの頭部に形成された測定面に取り付けてボルト軸力を計測する超音波探触子(20)に装着して用いられるものであって、前記超音波探触子を前記測定面へ取り付ける際に、前記ボルトの頭部の外面のうち前記測定面を除いた特定領域の少なくとも一部と摺接しながら前記超音波探触子を前記測定面へとガイドするガイド手段(21)を備えている。
(もっと読む)
帯状体の総張力測定装置
【課題】密度の低い帯状体や板厚の薄い帯状体であっても、シンプルな構成で総張力を精度よく測定できる非接触式の総張力測定装置を提供することである。
【解決手段】走行方向の2箇所の部位で支持ロール2a、2bに支持された帯状体1の振動変位を、支持部位間で計測する非接触式の変位計3を配設し、変位計3で計測された振動変位から求められる帯状体1の固有振動数と、支持部位間での帯状体1の質量と、支持部位間で帯状体1に接する空気の付加質量とから、帯状体1の総張力を演算装置4で演算して測定することにより、密度の低い帯状体や板厚の薄い帯状体であっても、その振動に影響する周りの空気の付加質量を考慮に入れて、総張力を精度よく測定できるようにした。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
力検知ユニット、圧電基板の製造方法及び加速度センサ
【課題】製造が容易で、小型で且つ薄型の精度の良い力検知ユニットを得る。
【解決手段】一方の主面の略中央部に凹陥部を形成することにより形成した薄肉部を有すると共に両端部に厚肉部を有した圧電基板と、前記圧電基板の他方の主面上の両端部寄りに少なくとも夫々一個ずつ形成したIDT電極と、を有した力感応素子と、前記力感応素子の前記一方の厚肉部の一方の主面側を接着剤により接着保持する、支持基板と、を備えた力検知ユニットであって、前記接着剤の厚みを利用して前記圧電基板の他方の厚肉部を前記支持基板上から離間させた片持ち支持とする。
(もっと読む)
触覚センシング方法
【課題】人の指荷重のかかり具合から対象物との接触状態の評価を官能的な評価も含めて行うことが可能な触覚センシング方法を提供する。
【解決手段】指の爪甲N2の上に装着され、指腹F1に向けて超音波を発信する超音波探触子1を備え、対象物に対して指腹F1を接触させたときに、指腹F1からの反射波を受信するステップと、受信された反射波の周波数及び/又は位相から指荷重の大きさを推定するステップと、を有する。さらに受信された指腹からの反射波の振幅値の変動から対象物の表面性状を推定するステップと、対象物に対して指腹を接触させたときに、爪床からの反射波を受信するステップと、受信された爪床からの反射波の振幅値から指荷重の大きさを推定するステップと、を有する。
(もっと読む)
張力測定方法及び張力測定装置
【課題】簡易な物理モデルを用いて帯状体の張力分布を高精度に求めることができる張力測定方法及び張力測定装置を提供する。
【解決手段】荷重が付加された帯状体1の幅方向に並ぶ複数の測定点30における変位特性を計測し、帯状体1について、測定点30に対応する節点41と該節点41に接合され該節点41に作用する張力を模擬した分布ばね43とを有する2次元の多質点系モデル40にモデル化し、多質点系モデルにおける固有値及び固有ベクトルを解析し、変位特性に基づく固有振動数及び振動モードベクトルと固有値及び固有ベクトルとが夫々一致するような分布ばね43のばね定数を算出し、ばね定数から張力を算出する。
(もっと読む)
架空電線の張力測定装置
【課題】 電線の外径に応じて打撃による固有振動数を安定して発生させて電線の張力を測定すること、電線を傷付けることなく確実に装置を取り付けること。
【解決手段】 張力測定装置1を、架空電線T上の所定径間Sの両端に固定する一対の固定部材2と、固定部材2間を連結する連結部材3と、連結部材3上に垂直面上を回転自在に枢支される打撃部材4と、打撃で径間Sに生じる架空電線Tの振動を感知する振動センサ5と、振動センサ5から信号を受けて固有振動数を算出した上で、径間Sの張力を算出する処理装置6とで構成する。固定部材2の電線把持部には架空電線Tを受け入れる湾曲凹部を設ける。振動センサ5は架空電線Tに荷重調整部材18を介して固定する。荷重調整部材18は架空電線T上の打撃による振動の周波数帯域を低くして固有振動数を安定して発生させるために、架空電線Tに応じて選択した質量を持つものを用いる。
(もっと読む)
駆動輪支持用ハブユニット軸受の予圧測定方法
【課題】駆動輪支持用ハブユニット軸受に対して等速ジョイントをスプライン嵌合し、ナット締めによる軸力を作用させた状態で行う予圧測定方法を提供する。
【解決手段】静止輪2、静止輪に対向配置されて回転する回転輪4(ハブ10、内輪構成体12)、複数の転動体6a,6bを備え、ハブ及び内輪構成体は、スプライン孔10tに等速ジョイントのスプラインシャフトを嵌合した状態で、シャフト延出方向端部側から締結部材によって等速ジョイントへ固定される駆動輪支持用ハブユニット軸受A1,A2に対し、スプライン溝52が外周部に形成された治具50をスプライン孔に嵌合させ、シャフト延出方向端部側に相当する端部側から締結部材30で締結することにより治具をハブに固定するとともに、締結部材による軸力をハブユニット軸受に作用させて予圧を付与し、軸力を作用させた状態で予圧量の測定を行う。
(もっと読む)
ファスナーデータの無線収集
データを、離れた場所で複数のファスナーから、問い合わせ信号がリーダから無線送信されると収集する。これらのファスナーの各ファスナーは、当該ファスナーに生じる応力に関連するパラメータを測定するセンサを含む。ファスナー群の各ファスナーに取り付けられるように適合させたデバイスは、問い合わせ信号を受信し、当該センサを作動させて当該パラメータを測定し、そして当該パラメータを含むデータを当該リーダに無線送信する。 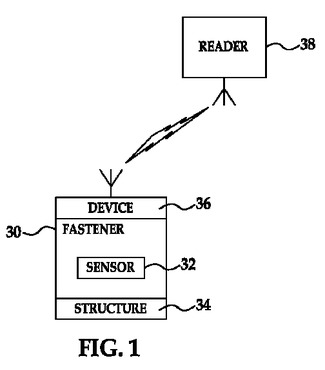 (もっと読む)
(もっと読む)
軸力測定用レール加振方法及びその装置
【課題】 電磁的な影響がないセラミック振動子を用いてレールの鉛直加振及び又は水平加振を行い、レールの固有振動数を測定し、レールの受ける軸力を測定することにより、軸力評価の信頼性を向上を図ることができる軸力測定用レール加振方法及びその装置を提供する。
【解決手段】 軸力測定用レール加振装置において、レールの頭頂面6A及び又は頭部側面6Eに配置されるセラミック振動子5,5′と、このセラミック振動子5,5′の固有振動モードに一致する周波数のパルス波形を出力する基本周波数発生器と、低周波数の正弦波波形を発生させる低周波数の発振器と、前記基本周波数発生器からの出力と前記低周波数の発振器からの出力とを混合する混合器とを備え、前記混合器からの出力波形に基づいて前記セラミック振動子5,5′を駆動して前記セラミック振動子5を振動させて、レールの軸力を測定する。
(もっと読む)
舵に作用する力を決定するための装置
【課題】切換え履歴現象を減らせる船舶の自動操舵システム及び/又は動的位置決めシステムを提供する。
【解決手段】演算処理装置29と、舵の物理量、特に持上げ力及び/又は抵抗力の値を決定するための少なくとも一つの測定装置27,28と、求められた物理量の値を演算処理装置29へ送るための装置とを含む装置12が設けられており、演算処理装置29は、決定された物理量の値に基づいて舵に作用する力を決定するように構成されている。
(もっと読む)
振動板の張力測定方法
【課題】騒音の多い場所においても、振動板の張力を安全にかつ高い信頼性をもって測定できるようにする。
【解決手段】コンデンサマイクロホン用の振動板を被測定振動板1として、その張力を共振周波数により測定する振動板の張力測定方法において、密閉箱10の開口部12内にダイナミックヘッドホンユニット20を発音振動板21が密閉箱10内に向くようにして気密的に嵌合し、上記ヘッドホンユニット20の磁気回路23の背面側に被測定振動板1を気密的な空間が形成されるように配置し、定電圧交流信号発生部よりボイスコイル213に交流信号を周波数可変として印加して発音振動板21を振動させ、電圧測定手段40により測定されるボイスコイル213の両端間電圧が最大値を示すときの上記交流信号の周波数を被測定振動板1の共振周波数として測定する。
(もっと読む)
レール軸力測定装置、レール軸力測定方法
【課題】現場において、自然状態にある実軌道のレールの締結を外したりレールを切断したりすることなくレールの軸力の測定を行うことができるレール軸力測定装置等を提供する。
【解決手段】レール軸力測定装置1は、レール7の側面に取り付けられ、レール7を所定の周波数で振動させる加振器3と、レール7の別の一方の側面に、加振器3と別の位置で取り付けられ、レール7の振動状態を検出する受信器5と、受信器5から出力された振動状態のデータに基づいてレール7の所定の振動モードに対する固有振動数を求め、事前に求めたレール7の軸力とレール7の所定の振動モードに対する固有振動数との対応関係に基づいて、レール7の軸力を算出する分析・算出装置6とを具備する。
(もっと読む)
ベルト張力測定装置
【課題】周囲の音や光などの外乱に左右されないベルトの張力測定を可能にする。
【解決手段】ピアノ線など長尺軽量の接触子6の一端6aをセンサハウジング12に固定する。接触子6の中間部は、コイル9を巻回した永久磁石8の磁極7、7に対向して所定間隔をあけて位置させる。接触子6は、その接触部6bを、指などで弾いて振動されるベルト4に接触して使用される。電流検出部10は、接触子6と磁極7、7との間隔の変動によってコイル9に生起される電流を測定し、コントローラ11は、検出電流の変動周期を固有振動周期とみなして、張力算出式を使用してベルト張力を測定する。
(もっと読む)
触覚センサー装置およびそれを用いたロボット
【課題】より正確な力の検出が可能な触覚センサー装置およびそれを用いた構造が簡単で小型のロボットを得ること。
【解決手段】触覚センサー81,82の検出期間がそれぞれ異なるので、他の触覚センサー81または82の振動の伝達による検出時のSN比の低下を抑えることができる。したがって、より正確な力の検出が可能な触覚センサー装置1000を得ることができる。また、触覚センサー81,82を順次駆動するので配線が少なくてすみ、前述の効果を備え、構造が簡単で小型のロボット100を得ることができる。
(もっと読む)
金属帯板の形状測定装置
【課題】コンパクトな構造で、金属帯板の材質によらず精度よく形状を測定することができ、データ伝送においても外乱が小さい金属帯板の形状測定装置を提供する。
【解決手段】金属帯板1が巻き付けられるように設置され、表面に1本以上の螺旋溝30が形成され、螺旋溝30に径方向に貫通する穴である溝部穴40が2箇所以上形成される中空円筒10と、中空円筒10に嵌合する薄肉円筒20と、中空円筒10の内部を貫通し、この中空円筒10を回転可能に支持する静止軸50と、静止軸50の軸方向におけるそれぞれの溝部穴40に対応する位置に設置され、金属帯板1を薄肉円筒20に巻き付けたときの薄肉円筒20の変位を測定するセンサ60と、センサ60により測定した薄肉円筒20の変位から、金属帯板1の板幅方向における張力の分布を演算する演算手段120とを備えた。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中の物体であるウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の数を数える信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
1 - 20 / 96
[ Back to top ]