
Fターム[2F062AA81]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 角度 (231) | 回転角 (36)
Fターム[2F062AA81]の下位に属するFターム
操舵角
ねじれ (1)
Fターム[2F062AA81]に分類される特許
1 - 20 / 35
工作機械
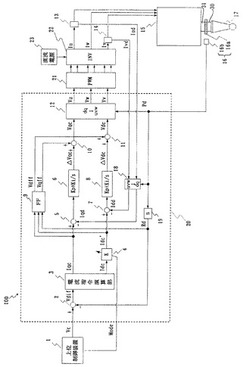
【課題】工作機械において、プローブの取り付けられた主軸を回転させてワークの計測を行う際の主軸の回転微振動を抑制し、計測精度を向上させる。
【解決手段】タッチプローブ17の取り付けられる主軸30と、主軸30を回転駆動するモータ15と、モータ15の回転角度位置を検出する回転角度位置検出器16と、制御装置20とを含み、制御装置20は、タッチプローブ17によってワークの測定を行う測定モード指令が入力された際に、d軸電流指令補正部4によってd軸電流指令値Idcに1より小さいd軸電流補正係数Kを乗じてd軸電流指令値Idcをd軸電流指令補正値Idc‘に低減する。
(もっと読む)
内周面測定装置

【課題】エンジンのシリンダブロック等の貫通穴の内周面を簡便に測定する内周面測定装置を提供する。
【解決手段】内周面測定装置1は、測定スピンドル29と第1支持部5と第2支持部17とガイドブロック48とを有する。第1支持部5及び第2支持部17はシリンダブロック2の両端面に着脱自在に取付られ、シリンダブロック2の貫通穴3に挿通された、測定スピンドル29を回転自在に支持する。測定スピンドル29は、円筒形状であり、内面32を切欠いて回転軸30の方向に略平行にのびるスリット33を有する。測定スピンドル29の内側に配置されるガイドブロック48には、貫通穴3の内周面4を計測する変位センサ51が固定される。ガイドブロック48は、スリット33に係合し回転軸30に沿って測定スピンドル29内を手動でスライド移動する。任意の測位位置において測定スピンドル29を手動で回転させて、内周面4の形状測定を行う。
(もっと読む)
伸び計
【課題】±3μm程度の計測精度を持つ自動材料試験機用の伸び計を提供する。
【解決手段】伸び計は、上下一対のレバー装置20U,20Lにより試験片TPの伸びを検出する。上下一対のレバー装置20U,20Lはそれぞれ、先端が試験片TPの一の標点位置に取付けられ、試験片TPの伸びに追従して回動軸の周りに回動するレバー本体を有する。レバー本体の回動量はレバー検出器で検出される。伸び計を試験片TPに着脱する際、レバー本体は前後進装置40U,40Lで試験片TPに対して前進し、後進する。レバー本体の上下動は、レバークランプ装置60U,60Lでクランプされる。レバークランプ装置60U,60Lは、レバー本体の先端と回動軸との間においてレバー本体を上下から挟持する一対のクランプ部材(62,64)を含む。
(もっと読む)
眼鏡形状測定装置
【課題】 装置自体を大型化させず、測定誤差を発生しにくくしたり、眼鏡枠の変形防止などの複合機能を備える眼鏡形状測定装置を提供する。
【解決手段】 眼鏡枠の玉型形状を測定する眼鏡形状測定装置において、眼鏡枠に直交する第1軸線を中心に回転するとともに眼鏡枠に対峙したテーブル6に設けられ、接触子9aを径方向に移動自在に支持する接触子移動機構10とを備え、接触子移動機構は、第1軸線と直交する第2軸線を軸心とするテーブルに設置された支持軸12と、支持軸に軸着され、第1軸線、第2軸線と直交する第3軸線の方向に揺動自在となした主動アーム13と、主動アームに連結軸16を介して連結され、連結軸を軸心として第3軸線の方向に揺動自在となした従動アーム15と、従動アームに軸着され、接触子9aをテーブル6の表面から眼鏡枠に向けて突出させる接触アーム9とを有し、接触アームを眼鏡枠に接触させることを特徴とする。
(もっと読む)
ロータリキルンにおける回転体の周長計測装置
【課題】ロータリキルンを停止させること無くタイヤ等回転体の外周長さを検出することができる計測装置を提供する。
【解決手段】ロータリキルンにおける回転体の周長を測定する装置であって、ストライカ16と近接センサ14によりタイヤ62の回転数を検出する回転検出部12と、タイヤ62の外周に転がり接触する周長測定用ローラ22と周長測定用ローラ22の回転角度を検出する回転角度検出器24とを有する周長測定部20と、回転検出部12と周長測定部20の稼動を制御し、回転検出部12によって検出された回転数と周長測定部20によって検出された回転角度、および周長測定用ローラ22の周長に基づいて、タイヤ62の周長および外径、または周長および外径のいずれか一方を算出する演算部を備えた制御部40とを有することを特徴とする。
(もっと読む)
回転体の肉厚等測定装置
【課題】 軸方向位置によって外径・内径寸法が異なる筒状の回転体であっても、肉厚、偏肉、偏心状態等を簡単に精度良く測定できる回転体の肉厚等測定装置を提供する。
【解決手段】 被測定物支持台装置1で支持した被測定物Wの中心軸Oに直交する方向に移動自在な水平移動台11を有する水平移動テーブル機構10と、水平移動台11にこれと同方向に移動自在にプローブ支持体22を設けた測定テーブル機構20とを備える。被測定物Wの内外周面への測定端子の接触を検出するプローブ30を、プローブ支持体22に設ける。水平移動台11の進退位置を水平位置検出手段40で、水平移動台11に対するプローブ支持体22の変位量を変位量検出手段50で検出する。被測定物内周面と対向位置の外周面へ測定端子を接触させたときの、変位量検出手段50の変位量検出値と水平位置検出手段40の位置検出値から被測定物Wの肉厚を演算する。
(もっと読む)
補正ボール径算出方法および形状測定装置
【課題】解析精度を向上させることができる補正ボール径を算出できる補正ボール径算出方法および形状測定装置を提供すること。
【解決手段】本発明によれば、基準ゲージを回転させながら該基準ゲージを測定することにより補正ボール径を算出する。そのため、基準ゲージを回転させながら測定することにより生じる誤差を含んだ補正ボール径を算出することができる。また、基準ゲージの複数の高さ位置を測定することにより各高さ位置毎に補正ボール径を算出する。そのため、測定する高さ位置に応じて生じる誤差を含んだ補正ボール径を各高さ位置毎に算出することができる。従って、被測定物Wを回転させながら測定した際に、これらの誤差を含んだ補正ボール径を用いて被測定物Wの形状等を解析することで、被測定物Wの形状等を高精度に解析することができる。
(もっと読む)
2トローク・クロスヘッド内燃エンジンのシリンダライナの直径を測定する方法、直径測定装置、および、前記方法に用いる可撓性リング
【課題】2ストローク・クロスヘッドエンジンが一時的に非作動状態にある間に、シリンダライナの直径を測定する方法およびその方法で使用される直径測定装置を提供する。
【解決手段】シリンダライナの直径を測定する電子的な直径測定装置10は、掃気ポート103を介して内燃エンジンのシリンダライナ106の内側に挿入されて測定位置に配置され、シリンダライナ106の内径を電子的なパラメータとして測定する。
(もっと読む)
ホイールアライメント計測装置
【課題】簡素な構成にすることにより、軽量化を図ると共に、車両への設置自由度を高くすることができるホイールアライメント計測装置を提供する。
【解決手段】車体側取付部31に対してX軸周りに回転可能に支持される門形回転部材33と、門形回転部材33に対してY軸周りに回転可能に支持されるシリンダ部材41aと、このシリンダ部材41aに対してZ軸方向に変位するロッド41bとを有する伸縮機構部材41と、伸縮機構部材41に対してZ軸周りに回転可能に支持される枠状回転部材52と、枠状回転部材52に対してX軸周りに回転可能に支持され、ホイール4に装着されるホイール取付部59をその回転軸周りに回転可能に支持する回転部材55と、計測された各部材33,51,55,41aの回転角度及びロッド41bの変位に基づいて、ホイール4のX軸,Y軸,Z軸方向の変位量、トー角度変化量、キャンバ角度変化量を演算する演算器14とを備える。
(もっと読む)
接触式変位計
【課題】被計測物の複数方向への変位量を1箇所で計測すること。
【解決手段】棒状に延在して形成され被測定物100に取り付けられる接触子2と、接触子2の延在方向へのスライド移動を許容する態様で被測定物100から離隔した固定部101側に設けられるスライド可動部3と、接触子2のスライド方向Xに直交する軸心Y,Z回りへの接触子2の回転移動を許容する態様で固定部101側に設けられる回転可動部4(41,42)と、接触子2のスライド移動量を検出するスライド検出手段5と、接触子2の回転角度を検出する回転検出手段6(61,62)とを備えている。
(もっと読む)
V溝形状測定方法および装置
【課題】回転テーブル上の被測定物のV溝形状の特性値を正確かつ確実に測定する。
【解決手段】測定子方向一定制御工程と、回転テーブル半径一定倣い制御工程と、2面接触倣い制御工程とを組み合わせ、被測定物のV溝を構成する2面に、常に倣いプローブ22の測定子24を接触させるV溝回転テーブル倣い制御工程を行い、プローブ22の倣い進行方向を、プローブ22の測定子24の中心位置の軌跡から求めて、倣い制御処理を行う。
(もっと読む)
カムプロファイル測定装置
【課題】安価で、しかも、複数種のカムのプロファイルを高精度に測定できるカムプロファイル測定装置を提供する。
【解決手段】カム1のプロファイルを測定するカムプロファイル測定装置。カム1を回転させる回転機構20と、カム1の回転角度を検出する回転角度検出手段30と、カム1のカムフォロア当接位置に当接され、カム1が回転することにより所定方向へ移動するプローブ40と、このプローブ40を所定方向に沿って案内する案内機構50と、プローブ40の移動位置を検出する位置検出手段60と、を備える。
(もっと読む)
形状測定装置、形状測定方法及び形状測定プログラム
【課題】被測定物の高さ変位によってアームが回転した場合であっても、測定点を正確に算出可能な形状測定装置を提供する。
【解決手段】形状測定装置は、擬似測定点を取得した際におけるアームの基準位置からの回動角度に基づいて、接触子の表面形状を特定する接触子モデルの基準角度からの回転角度と、この回転角度における接触子モデルの形状を算出する接触子モデル形状算出部213を備える。測定点算出部216は、比較部215において接触子モデルの基準角度における形状と、接触子モデルの回転角度における形状との変位量がしきい値以下と判断された場合には、接触子モデルの基準角度における所定位置を測定点として算出し、比較部215において変位量がしきい値を超えると判断された場合には、接触子モデルの回転角度における所定位置を測定点として算出する。
(もっと読む)
位置測定装置
【課題】 簡単かつ正確に被測定面の位置を測定できる位置測定装置を提供する。
【解決手段】 測定基準面12aに取り付け可能な架台1に取り付けられた旋回台2の旋回角度測定手段2aと、首振りアーム3と、首振り角度測定手段3aと、首振りアーム3から導出される可撓性の線状部材3bと、導出長さ測定手段3cと、旋回角度、首振り角度および導出長さの各測定手段の出力値を入力とする制御部と、被測定面5上の三点にそれぞれ導出された線状部材3bの距離データと角度データとに基づいて、被測定面5の位置を算出する位置算出手段5aとを有する位置測定装置10において、首振りアーム3の基部3dと、この基部3dを左右から支持する左右の軸支板6a、6bと、基部3dと左右の軸支板6a、6bとを各々接触させることによって電気的に導通した位置を旋回角度測定手段2aによって計測して、首振りアーム3のセンター値を割り出す。
(もっと読む)
形状測定装置
【課題】光学素子の基準面測定と光学面測定を1つのプローブで測定する。
【解決手段】プローブハウジング4とプローブシャフト2の間に、プローブシャフト2の相対変位を測定するX1変位計6a、X2変位計6b等を設け、プローブシャフト2の並進変位と回転変位を測定する。また、プローブシャフト2に対して並進力と回転力を発生させるために、ヨーク3a、3b、磁性体3c、3dを有するX力発生機構、Y力発生機構を設ける。被測定物Wの光学面Waの測定は、Z変位計7の出力を用いて行い、基準面Wbの測定は、X1変位計6a、X2変位計6b等の出力を用いる。
(もっと読む)
測定装置
【課題】長尺の真直形状や大型の平面形状を測定するために水準器に代わる道具として、被測定面に接する点と変位センサあるいは角度センサの組み合わせで多点方を実現するために、被測定面上を走査移動可能なセンサホルダを提供する。
【解決手段】被測定面に対して相対的に移動可能なセンサホルダを、被測定面に対して少なくとも2点の接点を有する形態にして、センサホルダと被測定面との2つの接点とセンサホルダの保持するセンサの測定点との3点によって、真直形状測定のための3点法と動揺の差動出力を得て、その出力から形状を求める。
(もっと読む)
絶対角検出方法及び絶対角検出装置
【課題】回転角度センサの誤差が絶対角に反映されにくい絶対角検出方法及び絶対角検出装置を提供する。
【解決手段】第1比例定数と、回転角θcaと回転角θcbとの差とを用いて演算し仮の絶対角KΦを求め、回転角θcaと第2比例定数とを用いて演算しメイン歯車2のシャフト回転角φacを求め、仮の絶対角KΦから回転角度センサ6におけるセンサ周期Θの繰り返し回数Ncaを求め、シャフト回転角φac及びセンサ周期Θとセンサ周期Θの繰り返し回数Ncaとから絶対角Φを求める。
(もっと読む)
角度検出装置
【課題】構成が比較的簡素で、正確に回転角度を検出し得る角度検出装置を提供する。
【解決手段】基台1と基台1上に回転可能に支持されたベース106と間の回転角度を検出し、ベルトのベルト固定装置に対する角度を検出する。基台1と基台1上に回転可能に支持されたベース106と間の回転角度を検出する。ベース106上に固定されたカム11と、カム11と接触してその姿勢もしくは位置が変位する従動子12と、従動子12の変位量を検出するセンサ13とを有する。ベース106の回転量に応じて変化する従動子12の変位量に基づき、ベース106の回転軸111のまわりの回転角度を検出する。
(もっと読む)
真円度測定装置、真円度測定方法、及び真円度測定プログラム
【課題】偏心が大きい場合であっても、高精度で偏心が求められる真円度測定装置、真円度測定方法、及び真円度測定プログラムを提供する。
【解決手段】真円度測定装置は、接触検出時において回転軸Oと測定子24とを結ぶX軸上の回転軸Oと測定子24の表面との間の距離を測定距離として取得し、回転角度を測定角度として取得する測定値取得部を有する。さらに、真円度測定装置は、偏心距離e、偏心角度αを計算する偏心位置計算部と、偏心距離e、偏心角度α、測定角度θ、ワーク4の半径R、及び測定子24の中心から表面までの長さ(半径Rtip)に基づき、ワーク4と測定子24との接触する接触点Pから回転軸Oまでの距離OPとなるように測定距離を補正し、回転軸Oを中心とするX軸と接触点Pとの間の補正角度γを測定角度に加算する補正を行う測定値補正部とを備える。
(もっと読む)
検出装置
【課題】検出手段の損傷を確実に防止することができる検出装置を提供する。
【解決手段】搬送手段3により搬送される物体Sに接近又は離間する方向に移動して該物体Sの性状を検出可能であると共に、計測手段6が計測した移動方向に沿った物体Sの長さに応じて物体Sに接近可能な検出手段21と、搬送手段3による物体Sの搬送方向に対して検出手段21より上流側で検出手段21と共に物体Sに接近可能であり、前記移動方向における物体Sの規制位置にてこの物体Sに接触して物体Sを検知可能な検知手段7と、検知手段7が物体Sを検知した際に物体Sと検出手段21との接触を回避する回避手段5とを備えることを特徴とする。
(もっと読む)
1 - 20 / 35
[ Back to top ]