
Fターム[2F062EE01]の内容
機械的手段の使用による測定装置 (14,257) | 測定方法 (2,962) | 接触測定 (1,274)
Fターム[2F062EE01]の下位に属するFターム
挟持式 (261)
基準との差を検出するもの (107)
Fターム[2F062EE01]に分類される特許
141 - 160 / 906
形状測定センサ
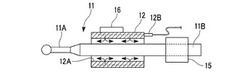
【課題】プローブの構成に関係なく、先端にかかる負荷を高感度に検出することができる形状測定センサを提供する。
【解決手段】被検物の表面形状を測定するための形状測定センサは、自身の軸方向に摺動可能に支持され、軸方法に摺動することにより被検物の表面形状に追従するプローブ11と、プローブに向かって流体を供給しつつ、プローブを軸方向に摺動可能に支持する静圧軸受12と、流体の動態の変化を監視することにより、プローブの先端部にかかる負荷を検出する加速度センサ16とを備えることを特徴とする。
(もっと読む)
産業機械

【課題】エアー放出量を低減して省エネルギー化を図れる産業機械を提供する。
【解決手段】三次元測定機1(産業機械)は、エアーを供給するエアー供給部7と、エアー供給部7から供給されるエアーにより駆動される駆動機構25と、エアー供給部7から駆動機構25にエアーを導入するエアーレギュレータセット内に設けられ、エアーレギュレータセット内の空気供給路を開閉する電磁弁と、駆動機構25が駆動停止してからの時間が予め設定された設定時間になると、電磁弁を制御して、空気供給路を閉塞させるモーションコントローラー3と、を具備した。
(もっと読む)
球体形状測定装置
【課題】本発明の解決すべき課題は、真円度測定機の機構を用い、被検球体の真球度、形状を効率よく測定することにある。
【解決手段】
回転テーブル14と、
該回転テーブル14と平行な赤道面上での被検球体輪郭を、回転テーブル14の回転に伴い測定するプローブ22と、
前記回転テーブル14上に載置され、被検球体30を保持する被検球体保持手段24と、を備え、
前記被検球体保持手段24は、被検球体30の中心を前記回転テーブル14の回転軸上に位置させ、かつ該被検球体30を前記回転テーブル面に対して、正弦が1/√3となる角度を中心として±5度の範囲で傾けた傾斜軸線上で回転可能に保持することを特徴とする球体形状測定装置10。
(もっと読む)
三次元座標測定機用ゲージ及び三次元座標測定機の精度評価方法
【課題】より高精度、より簡便に構成可能な三次元座標測定機ゲージを提供するとともに、当該三次元座標測定機ゲージを用いた精度評価方法を提供する。
【解決手段】 基板3の表面に固定された第1の球体4及び第2の球体5と、前記基板3の表面から突出して設けられた第1の柱7上に固定された第3の球体6と、を備えることにより三次元座標測定機を精度評価するための三次元座標測定機ゲージ1を構成する。
(もっと読む)
管路の内径測定装置、及び、管路の内径測定方法
【課題】管路の周方向の任意の位置において内径の測定を行うことのできる、管路の内径測定装置、及び、内径測定方法を提供すること。
【解決手段】内径測定装置1は、装置本体10と、この装置本体10に回転自在に設けられ、管路の径方向に移動可能な測定子31を有する測定ユニット11と、測定ユニット11の回転中心を管路の中心軸線CL上に位置させるセンタリング機構12と、測定ユニット11を管路の周方向に沿って回転させるモータ14とを備えている。そして、測定ユニット11を装置本体10に対して管路の周方向に沿って回転させることにより、管路の内面の測定子31が当接する位置を周方向に変更し、管路内面の周方向複数位置について内径をそれぞれ測定する。
(もっと読む)
プローブヘッド
【課題】ロータリーカップリングによって下ハウジングを上ハウジングに対して連続的に回転させることを可能とするプローブヘッドを提供する。
【解決手段】測定プローブ2を支持する連結手首を有し、プローブを2つの回転軸A、Bのまわりに回転させるプローブヘッド6であり、ヘッドは装置と接続するための上ハウジング10と回転可能に接続し、第1モータMBによって上ハウジングに関して第1軸Bまわりに連続的に回転することができる、下ハウジング12と測定プローブに回転可能に接続し、第2モータMAによって下ハウジングに関して前記第1軸を横切る第2軸Aまわりに回転することができるキャリジ14と、第1軸まわりの連続的な回転を可能として少なくとも第2モータのための電力経路aを提供するロータリーカップリング90と、を具えた。
(もっと読む)
測定装置
【課題】座標読取値の信頼性の向上、およびラッチ処理の高速化を実現可能な測定装置を提供する。
【解決手段】三次元測定機(測定装置)は、被測定対象物に対して接触可能な測定子211、および測定子211の被測定対象物への接触を検出してタッチ信号を出力する接触検出センサー212を有するプローブ21と、プローブ21を互いに直交する3軸方向に沿って移動させる移動機構22と、プローブ21の位置座標を検出して座標検出信号を出力するスケールセンサー25X,25Y,25Zと、タッチ信号をカウントするタッチカウンタ281、および座標検出信号をカウントするスケールカウンタ282が組み込まれた集積回路28を有する制御回路基板26と、タッチカウンタの値、およびスケールカウンタの値を同タイミングでラッチするラッチ制御部29と、を具備した。
(もっと読む)
産業機械
【課題】熱膨張によるラムのZ軸シフト量を高精度に算出可能な産業機械を提供する。
【解決手段】三次元測定機1(産業機械)は、Z軸に沿うコラム221およびサポータ225と、これらの間に設けられたビーム222上で移動可能なスライダ223と、スライダ223にZ軸方向に移動可能に保持されたラム224と、コラム221、サポータ225、及びラム224のそれぞれの温度を検出する温度検出センサー226および温度検出部32と、これらのコラム221、サポータ225、及びラム224の各温度、基準温度におけるこれらの位置関係を示す基準位置データ、及びこれらの熱膨張係数に基づいて、前記Z軸シフト量を算出するシフト量算出部33と、を備えた。
(もっと読む)
機械部品の寸法および/または形状の検査装置
【課題】公知のゲージの欠点を克服した、機械部品の直径および形状誤差を検出するプラグゲージとしての検査装置を提供する。
【解決手段】検査装置は、2つ以上の数のフィーラ36と、前記フィーラ36の測定方向に沿った相互移動を示す電気信号を生成する位置トランスデューサ37とを備える検査装置であって、適合システムが前記フィーラ36のうち少なくとも1つのフィーラ36と結合され、前記少なくとも1つのフィーラ36を、前記測定方向と垂直な適合方向に実質的に沿って動かすことができる。
(もっと読む)
レンズ形状測定装置
【課題】短時間で簡易にレンズ計上を測定することのできる測定装置を提供することを目的とする。
【解決手段】 レンズ基板を載置固定するステージと、レンズ基板の表面を検出する変位センサを備え、同一直線上に並んで配列された複数のプローブと、を含むレンズ形状測定装置とする。
(もっと読む)
産業機械
【課題】 移動機構の揺動を抑えて移動機構を移動させることができ、制御対象物による測定誤差を低減できる産業機械を提供する。
【解決手段】 三次元測定機1は、被測定物を載置するテーブル11と、テーブル11に対して移動可能な支持部213を有し、支持部213で支持されて所定の軸方向へ移動可能に設けられ、プローブ12を所定の軸方向へ移動させる移動機構2と、移動機構2を制御する制御装置と、門型フレーム21に取り付けられ、移動機構2と制御装置とを接続するケーブルを案内して収納するケーブルベア3とを備えるものであって、ケーブルベア3の重心を通ってZ軸方向に延びる重心軸線O−Oが、X軸方向において、支持部213の中心を通ってZ軸方向に延びる支持案内軸P−Pと一致している。
(もっと読む)
三次元測定機
【課題】スピンドル内にエアーバランス機構を備えた構成において、外観を損なうことなく、スピンドルの上下動や測定精度にも影響を与えることが少ない三次元測定機を提供。
【解決手段】エアーバランス機構19を備えた三次元測定機。エアーバランス機構は、Z軸スピンドル12内に設けられたシリンダ20と、このシリンダ内に摺動可能に収納されたピストン29と、このピストンをガイド筒22等に支持する支持軸28と、ピストンで区画されたシリンダ内の押上力発生室201とを備える。プローブ13からの配線13Aを、シリンダの外面に接触させることなく、スピンドルの内面とシリンダの外面との間を通してスピンドルの外部へ導く誘導路43がZ軸スピンドル12の内部に形成されている。
(もっと読む)
産業機械
【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
多軸工作機械の幾何誤差の計測方法
【課題】外乱に基づいて不適切な幾何誤差が計測された場合であっても、そのような不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差の計測方法を提供する。
【解決手段】幾何誤差の計測においては外乱誤差有無確認ステップを実行し、幾何誤差を同定する前に、A軸およびC軸を複数の条件で割り出して、ターゲット球12の直径を計測し、それらの計測値のバラツキを算出し、それらのバラツキが予め設定された直径変動量許容値Daを超えた場合には、計測ミスと判断する。
(もっと読む)
外骨格を有するCMMアーム
【課題】外骨格および伝達手段を有するCMMアームを提供する
【解決手段】 ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
(もっと読む)
変形状態測定装置
【課題】被測定物全体が加圧された状況下での変形状態を形状データと分布圧力データとして瞬時に測定する装置を提供する。
【解決手段】ベース40と、前記ベース40の上部に取り付けられた面圧シート10と、前記面圧シート10の上部に複数取り付けられたプローブピン20と、複数の前記プローブピン20を各々覆うように取り付けられた複数のガイド筒30から構成されており、前記プローブピン20は下側ピン22と前記下側ピン22を覆うように配置されたプローブカップ24と前記下側ピン22とプローブカップ24の間に挟まるように配置された弾性体とから構成されており、前記面圧シート10と前記下側ピンと22が接触している。
(もっと読む)
形状測定装置
【課題】プローブの運動の履歴に基づく測定誤差を補正することができ、測定精度を向上させることができる形状測定装置の提供。
【解決手段】形状測定装置1は、装置本体2と、装置本体2を制御する制御手段3とを備える。装置本体2は、プローブ4を備え、プローブ4は、被測定物に接触する測定子を先端側に有する棒状のスタイラス41と、スタイラス41の基端側を支持する支持機構42とを備える。支持機構42は、スタイラス41の位置を検出するプローブセンサ421を備え、スタイラス41を一定の範囲内で移動可能に支持する。制御手段3は、プローブセンサ421にて検出されるスタイラス41の位置を入力とし、測定子、及び被測定物の接触する位置を出力とする伝達関数に基づいて、測定値を算出する。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
レール面測定装置及び測定セット
【課題】レール面測定装置の運搬性を高める。
【解決手段】レール面測定装置Xは、所定の長さのガイドバー1と、ガイドバー1をスライドしてレールRの頭頂面8の凹凸を測定する測定器70と、を備えている。ガイドバー1は、第一ガイドバー部10及び第二ガイドバー部20と、第一ガイドバー部10の長手方向の端面16aと第二ガイドバー部20の長手方向の端面26aとが互いに接触し、各ガイドバー部10,20が一直線上に並んでいる使用可能状態と、レール幅方向Wrで、各ガイドバー部10,20が重なり合っている運搬可能状態との間で、測定器70の接触子の変位方向Hを向いている回転軸を中心として、第一ガイドバー部10に対して第二ガイドバー部20を揺動可能に連結するヒンジ30と、を有している。
(もっと読む)
スタイラス摩耗検出方法および表面性状測定機
【課題】スタイラスの摩耗や欠損に対して、スタイラスの交換時期を適正に知らせることができるスタイラス摩耗検出方法および表面性状測定機を提供する。
【解決手段】表面に周期的に変化する凹凸が形成された標準片の表面に沿ってスタイラスをトレースしながら、そのトレース方向に対して交差する方向のスタイラスの変位を検出し、この変位から標準片の測定曲線を取得する測定曲線取得工程と、測定曲線に対して周波数解析を行う周波数解析工程と、この周波数解析工程で得られた周波数解析結果からスタイラスの摩耗量を演算する摩耗量演算工程と、この摩耗量演算工程で演算された摩耗量を表示する摩耗量表示工程と、を備える。
(もっと読む)
141 - 160 / 906
[ Back to top ]