
Fターム[2F062EE01]の内容
機械的手段の使用による測定装置 (14,257) | 測定方法 (2,962) | 接触測定 (1,274)
Fターム[2F062EE01]の下位に属するFターム
挟持式 (261)
基準との差を検出するもの (107)
Fターム[2F062EE01]に分類される特許
201 - 220 / 906
矩形板状物の割れ検査方法及び検査装置
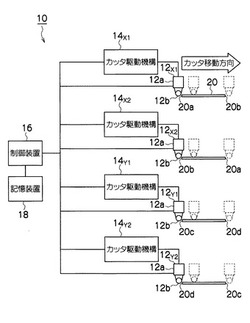
【課題】ガラス板の割れの有無を検査する。
【解決手段】切り折り対象のガラス板の一端面に接触し、当該一端面からその反対側の他端面に向かって移動しながらガラス板の表面に切り折りの起点となる傷を入れ、前記他端面に到達した場合に前記表面及び他端面に対する接触が解除されるカッタを備えた切機を用いて、ガラス基板の割れを検査する検査方法において、前記カッタがガラス基板の一端面に接触したか否かを検出するステップと、前記カッタがガラス基板の一端面に接触した時点の当該カッタの位置を、ガラス基板の一端面の位置として検出するステップと、前記検出したガラス基板の一端面の位置と予め定められた設定範囲とを比較するステップと、前記比較の結果に基づいて、前記検出したガラス基板の一端面に割れが存在するか否かを判定するステップと、を備えることを特徴とする。
(もっと読む)
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。 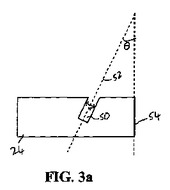 (もっと読む)
(もっと読む)
スタイラス観察装置

【課題】簡素な構成でスタイラスの姿勢を容易、かつ適切に調整することができるスタイラス観察装置の提供。
【解決手段】スタイラス観察装置2は、スタイラス11の軸に直交する平面内で光軸を互いに直交させるように配設され、スタイラス11からの光を反射させる2つのミラー21,22と、各ミラー21,22にて反射される光を合成するハーフミラー23と、ハーフミラー23にて合成される光を撮像する撮像手段25とを備える。スタイラス11からの光は、2つのミラー21,22にて反射され、ハーフミラー23にて合成される。そして、ハーフミラー23にて合成される光は、撮像手段25にて撮像されるので、スタイラス11を互いに直交する2つの方向から同時に撮像することができる。
(もっと読む)
厚さ連続測定器、厚さ連続測定装置及び厚さ連続測定方法
【課題】 厚さ1mm以下の長尺シートの厚さを連続的に測定する。
【解決手段】 装置基体10と、上下方向に揺動自在に前記基体10に取付けられた回転自在の上部球26と、上部球26の上方に取付けられ前記上部球26の上下揺動に連動して上下揺動するレーザー光反射体16と、前記レーザー光反射体16の上方において装置基体10に固定されたレーザー厚さ測定器14とからなる上部球支持装置6と、前記上部球支持装置6の上部球26と対向して上部球26の下方に回転自在に下部球32を配設してなる下部球支持装置8とからなる連続走行シートの厚さ連続測定器。
(もっと読む)
表面性状測定機
【課題】スタイラスの交換時期を適正に知らせることができる表面性状測定機を提供する。
【解決手段】操作キー51〜58によって入力されたしきい値を記憶するしきい値記憶部64と、スタイラス33のトレース方向の移動距離を検出するスタイラス移動距離検出器36と、このスタイラス移動距離検出器によって検出されたスタイラスの移動距離を累積記憶する累積移動距離記憶部65と、しきい値記憶部64に記憶されたしきい値と累積移動距離記憶部65に記憶された累積移動距離とを比較し、累積移動距離がしきい値を超えたときにスタイラスの交換を表示器41に表示する報知手段(制御手段70)とを備える。
(もっと読む)
表面形状測定装置
【課題】被測定物の表面形状を高い精度で測定し得る表面形状測定装置を提供する。
【解決手段】表面形状測定装置500は、被測定物600を支持する被測定物台510と、力感知部100と、力感知部100と被測定物600を互いに近づけるまたは遠ざけるために力感知部100と被測定物600を相対的にZ軸に沿って移動させるZ走査機構540と、Z軸に直交するX軸に沿って力感知部100と被測定物600を相対的に移動させるX走査機構520とを備えている。力感知部100は、被測定物600に近接されて被測定物600から力を受けるプローブを含み、このプローブが被測定物600から受ける力を感知する機能を有している。
(もっと読む)
三次元測定機
【課題】簡素な処理でプローブや移動機構と、被測定物とが衝突したか否かを迅速に判定することができる三次元測定機の提供。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ21と、プローブ21を移動させる移動機構22と、モーションコントローラ3とを備える。モーションコントローラ3は、移動機構22にてプローブ21を移動させるための電流値を検出する電流値検出部33と、プローブ21にて被測定物を測定する測定モードと、被測定物を測定することなくプローブ21を移動させる移動モードとを識別するモード識別部34と、電流値検出部33にて検出される電流値と、モード識別部34による識別結果に応じて設定される閾値とに基づいて、移動機構22にかかる負荷の状態を判定する負荷判定部35とを備える。
(もっと読む)
コンクリート壁の表面粗さ評価方法及び評価装置
【課題】測定者によるバラつきが少なく簡便に測定することができる、コンクリート壁の表面の目粗し程度を評価する方法及び装置を提供する。
【解決手段】評価装置10は、コンクリート壁8の表面に配置される摩擦抵抗体12と、摩擦抵抗体12を支持する支持手段14と、摩擦抵抗体12がコンクリート壁8の表面に対して垂直方向に一定の力で押し付けられるように支持手段14に荷重を掛ける荷重付与手段16と、摩擦抵抗体12をコンクリート壁8の表面に接しつつ支持手段14をコンクリート壁8の表面に沿って直線移動させる直線移動手段18を備える。摩擦抵抗体12が荷重を付与されつつ直線移動する時の抵抗荷重を計測手段20で測定し、その抵抗荷重の変動によりコンクリート壁8の目粗しの程度を評価する。
(もっと読む)
三次元測定機
【課題】プローブや移動機構と、被測定物との衝突を判定するための適切な閾値を設定することができ、プローブや移動機構と、被測定物とが衝突したか否かを迅速に判定することができる三次元測定機の提供。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ21と、プローブ21を移動させる移動機構22と、モーションコントローラ3とを備える。モーションコントローラ3は、移動機構22にてプローブ21を移動させるための電流値を検出する電流値検出部33と、電流値検出部33にて検出される電流値と、移動機構22にてプローブ21を移動させる速度の目標値に応じて設定される閾値とに基づいて、移動機構22にかかる負荷の状態を判定する負荷判定部34とを備え、速度の目標値と、閾値との関係は比例関係である。
(もっと読む)
てこ式検出器、スタイラス、及びスタイラス自動交換装置
【課題】てこ式検出器に対して複数種のスタイラスを交換する作業の負担を軽減でき、複数種のスタイラスを自動で交換できるてこ式検出器、スタイラスおよびスタイラス自動交換装置を提供する。
【解決手段】スタイラスホルダにスタイラス31を装着するため、ホルダの軸体36の中心軸に直交する方向にスタイラス本体33の長尺方向を合わせて、かつ軸体36の中心軸に直交する方向にスタイラス本体33に設けた着座板体34を移動させた場合に、この着座板体34に位置するスタイラス31全体の重心(重心軸)まで軸体36を案内する略U字状の切欠部を、当該着座板体34に形成する。切欠部によって軸体36が重心まで案内された状態で、板状揺動体37が着座板体34を着脱可能に保持する。
(もっと読む)
複合表面粗さ標準片
【課題】複数の種類の校正およびチェクが容易にできる粗さ標準片を提供する。
【解決手段】複数の測定領域14、16を、1つのブランク12の表面に連続して、もしくは相互に間隔を置いて作る。測定領域14、16の溝パターンは、深さ方向には同一の振幅を有する正弦波状であり、測定方向の波長がそれぞれ2.5mm、0.8mm、0.25mm、0.08mm、0.025mmである溝パターンの内の2乃至5種類の測定領域14、16を有しているようにする。測定方向の波長が測定方向の距離に対して直線的に変化するようにしたり、対数関数の関係を有して変化するようにしてもよい。あるいは、複数の測定領域14、16は、それぞれが正弦波状、三角波状、及び円弧を連ねた溝パターンを有し、これらが実質的に平坦な領域を挟んで配置されているようにしてもよい。
(もっと読む)
仮想表面によって測定過程を制御する方法
本発明は、測定対象(12)を計測する座標測定機(46)の測定過程を制御する方法(10)であって、前記座標測定機(46)が制御装置(64)と探触ピン(18)を備えたプローブ(60)とを有し、前記探触ピン(18)と前記測定対象(12)の表面(14)との間の相対運動が前記制御装置(64)によって制御されるものに関する。さらに、前記表面(14)は測定対象表面(13)に一致した少なくとも1つの実際部分(24)と少なくとも1つの仮想部分(26)とを有する。本発明はさらに、当該座標測定機とコンピュータプログラムとに関する。
(もっと読む)
薄膜の傾き測定装置及び傾き測定方法
【課題】設置スペースが小さく、低い設備コストで精度よく薄膜の傾きを測定できる薄膜の傾き測定装置等を提供する。
【解決手段】円形基材Cの円形平面上に位置する薄膜Fの円形平面に対する傾きφを測定する装置1であって、円形平面が所定の面に倣うように円形基材を挟持する挟持手段17、18、27、31と、挟持手段によって挟持された円形基材を、所定の面に対して平行な一方向に所定の距離移動させて基準位置からの変位を測定する変位測定手段13、50と、変位測定手段によって測定された変位に基づいて、円形基材を所定の位置に位置決めする位置決め手段13と、位置決め手段によって位置決めされた円形基材の円形平面上に位置する薄膜表面上の複数の点の、円形平面からの高さを測定する高さ測定手段42、43、44と、高さ測定手段による測定値に基づいて、薄膜の円形平面に対する傾きを算出する傾き算出手段とを備える薄膜の傾き測定装置等。
(もっと読む)
継ぎ手金(つぎてがね)
【課題】プレハブ製作のための骨子部分であるパイプと継ぎ手(フィッティング部品)を仮付けする際、複数の測定部品を一つの器具に収容し、持ち運びを容易にするとともに、片手での作業も可能にする。
【解決手段】メインアーム2、45度アーム4、スライドアーム5は本体1を、ロックアーム3はアーム2を軸として可動するようになっており、非使用時には折りたたむことができる。
(もっと読む)
基準器、及び座標測定機
【課題】定盤の自由な位置に設置することができ、座標測定機の製造コストを低減させることができる基準器の提供。
【解決手段】基準器は、三次元測定機に測定される基準器本体と、基準器本体を支持する台座4とを備える。台座4は、定盤11の平面11Aに当接する当接面421を有する円盤状に形成されている。当接面421には、断面円環状の凹部422が形成されるとともに、凹部422には、空気を吸気するための吸気孔423が形成されている。また、台座4は、吸気孔423に連通する吸気用流路43を有し、吸気用流路43を介して吸気孔423から空気が吸気されることで定盤11に対して吸着することができる。
(もっと読む)
ねじれ量測定装置
【課題】火気厳禁の場所であってもスキルを要求されることなく,一対のロール間に発生しているねじれ量を測定することのできるねじれ量測定装置を提供する。
【解決手段】ねじれ量測定装置は,駆動ロール5を受ける逆V型のロール受け部を有する固定受け部2上に,水平面に対して回動自在に支持され,加圧ロール4を受けるV字型のロール受け部300を有する回動受け部材と,回動受け部材をスライドさせる直動案内部材31と,基準位置からの回動受け部材のスライド量を示すゲージ部材32を備えた測定機構3が設けられている。
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 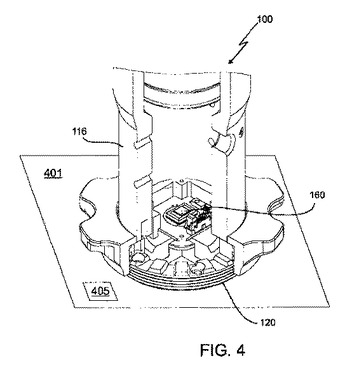 (もっと読む)
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 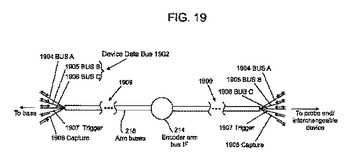 (もっと読む)
(もっと読む)
取り外し可能なアクセサリを有する座標測定機
可搬型の関節アーム座標測定機(100)が、提供される。座標測定機(100)は、アーム部(104)とともに基部(116)を含む。プローブ端(401)が、基部(116)から遠位にある、アーム部(104)の端部に結合される。プローブ端(401)は、締め具(438)および第1のコネクタ(428)を有する。デバイス(400)が、締め具(438)によってプローブ端(401)に取り外し可能なように結合され、デバイス(400)は、締め具(438)がデバイス(400)をプローブ端(401)に結合するときに第1のコネクタ(428)に係合するように構成された第2のコネクタ(429)を有する。 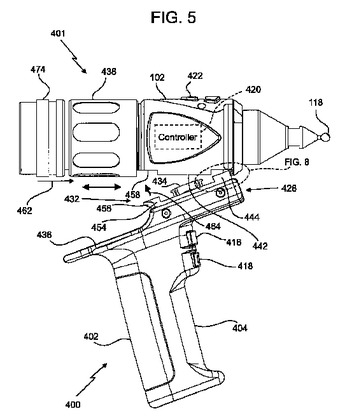 (もっと読む)
(もっと読む)
座標測定デバイスのためのカウンタバランス
可搬型の関節アーム座標測定デバイスが、提供される。座標測定デバイスは、基部と、少なくとも1つのアームセグメントを有する関節アーム部とを含む。付勢部材が、基部に第1の端部で結合され、関節アーム部に第2の端部で結合される。付勢部材の第1の端部は、第1の位置と第2の位置の間を動くことができる。アジャスタが、基部と付勢部材の間に結合される。アジャスタは、付勢部材の第1の端部を第1の位置から第2の位置に動かすために結合される。  (もっと読む)
(もっと読む)
201 - 220 / 906
[ Back to top ]