
Fターム[2F062EE62]の内容
機械的手段の使用による測定装置 (14,257) | 測定方法 (2,962) | フィーラ、測定子の数 (1,281) | 1つ (850)
Fターム[2F062EE62]に分類される特許
121 - 140 / 850
三次元形状測定装置
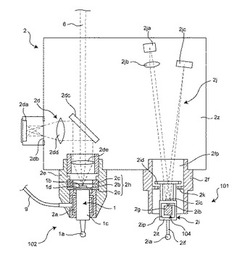
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
脆性破壊するトルク感応表示体。

【課題】 構造物乃至部材の変形規模、トンネルなど壁面のひび割れの変化を簡易な構成で表示する歪感応表示体とナットの締付けトルクを目視で確認できるトルク感応表示体を得ること。
【解決手段】 構造物乃至部材の変形規模を脆性破壊する歪感応表示体の破断又はひび割れで表示し、又は塗料として所定形状に塗布乾燥させて形成し、また着色した着色歪感応表示体と異色の対比表示層を設け、また破壊点を変更可能な略V字状の切欠部又は溝部を設け、また破壊点が相違する複数枚の歪感応表示体を並設し、また導電性を有する導電性歪感応表示体とし、またトンネルなど壁面のひび割れに横断して設け、またUボルトなど取付保持金具のナットによる締付けトルクを検知するトルク感応表示体とし、また側面側に設けるとし、それら各歪感応表示体で構造物又は該部材が変形する有無と規模を表示する、脆性破壊する歪感応表示体。
(もっと読む)
形状測定センサ
【課題】プローブの構成に関係なく、先端にかかる負荷を高感度に検出することができる形状測定センサを提供する。
【解決手段】被検物の表面形状を測定するための形状測定センサは、自身の軸方向に摺動可能に支持され、軸方法に摺動することにより被検物の表面形状に追従するプローブ11と、プローブに向かって流体を供給しつつ、プローブを軸方向に摺動可能に支持する静圧軸受12と、流体の動態の変化を監視することにより、プローブの先端部にかかる負荷を検出する加速度センサ16とを備えることを特徴とする。
(もっと読む)
表示装置を用いた運転者頭部位置検出方法
【課題】自動車等の車両には、運転者が快適且つ安全に運転を行うための車内設備が備えられているが、これらの車内設備は運転者の身長又は体型によって最適な設定が異なるため、運転中の運転者が最適な設定を得るために車内設備を操作すると安全運転の妨げになるといった問題が生じる。
【解決手段】車両内に備えられた複数の点のうち、基準点を移動させて前記複数の点を重ね合わせることで運転者の頭部の位置を検出する頭部位置検出方法において、前記頭部位置検出方法はナビゲーション又はエアコン、オーディオ、車両状態等の少なくとも1つの情報の表示を行うディスプレイを有した表示装置を用いて行われ、前記表示装置によって検出された前記運転者の頭部の位置に基づいて車内設備の設定変更を行う。
(もっと読む)
産業機械
【課題】エアー放出量を低減して省エネルギー化を図れる産業機械を提供する。
【解決手段】三次元測定機1(産業機械)は、エアーを供給するエアー供給部7と、エアー供給部7から供給されるエアーにより駆動される駆動機構25と、エアー供給部7から駆動機構25にエアーを導入するエアーレギュレータセット内に設けられ、エアーレギュレータセット内の空気供給路を開閉する電磁弁と、駆動機構25が駆動停止してからの時間が予め設定された設定時間になると、電磁弁を制御して、空気供給路を閉塞させるモーションコントローラー3と、を具備した。
(もっと読む)
球体形状測定装置
【課題】本発明の解決すべき課題は、真円度測定機の機構を用い、被検球体の真球度、形状を効率よく測定することにある。
【解決手段】
回転テーブル14と、
該回転テーブル14と平行な赤道面上での被検球体輪郭を、回転テーブル14の回転に伴い測定するプローブ22と、
前記回転テーブル14上に載置され、被検球体30を保持する被検球体保持手段24と、を備え、
前記被検球体保持手段24は、被検球体30の中心を前記回転テーブル14の回転軸上に位置させ、かつ該被検球体30を前記回転テーブル面に対して、正弦が1/√3となる角度を中心として±5度の範囲で傾けた傾斜軸線上で回転可能に保持することを特徴とする球体形状測定装置10。
(もっと読む)
プローブヘッド
【課題】ロータリーカップリングによって下ハウジングを上ハウジングに対して連続的に回転させることを可能とするプローブヘッドを提供する。
【解決手段】測定プローブ2を支持する連結手首を有し、プローブを2つの回転軸A、Bのまわりに回転させるプローブヘッド6であり、ヘッドは装置と接続するための上ハウジング10と回転可能に接続し、第1モータMBによって上ハウジングに関して第1軸Bまわりに連続的に回転することができる、下ハウジング12と測定プローブに回転可能に接続し、第2モータMAによって下ハウジングに関して前記第1軸を横切る第2軸Aまわりに回転することができるキャリジ14と、第1軸まわりの連続的な回転を可能として少なくとも第2モータのための電力経路aを提供するロータリーカップリング90と、を具えた。
(もっと読む)
測定装置
【課題】座標読取値の信頼性の向上、およびラッチ処理の高速化を実現可能な測定装置を提供する。
【解決手段】三次元測定機(測定装置)は、被測定対象物に対して接触可能な測定子211、および測定子211の被測定対象物への接触を検出してタッチ信号を出力する接触検出センサー212を有するプローブ21と、プローブ21を互いに直交する3軸方向に沿って移動させる移動機構22と、プローブ21の位置座標を検出して座標検出信号を出力するスケールセンサー25X,25Y,25Zと、タッチ信号をカウントするタッチカウンタ281、および座標検出信号をカウントするスケールカウンタ282が組み込まれた集積回路28を有する制御回路基板26と、タッチカウンタの値、およびスケールカウンタの値を同タイミングでラッチするラッチ制御部29と、を具備した。
(もっと読む)
産業機械
【課題】熱膨張によるラムのZ軸シフト量を高精度に算出可能な産業機械を提供する。
【解決手段】三次元測定機1(産業機械)は、Z軸に沿うコラム221およびサポータ225と、これらの間に設けられたビーム222上で移動可能なスライダ223と、スライダ223にZ軸方向に移動可能に保持されたラム224と、コラム221、サポータ225、及びラム224のそれぞれの温度を検出する温度検出センサー226および温度検出部32と、これらのコラム221、サポータ225、及びラム224の各温度、基準温度におけるこれらの位置関係を示す基準位置データ、及びこれらの熱膨張係数に基づいて、前記Z軸シフト量を算出するシフト量算出部33と、を備えた。
(もっと読む)
無重力下形状を推定するための方法及び装置
【課題】薄いガラスシートのような可撓性物体(140)に無重力下形状を推定するための方法及び装置(100,200)を提供する。
【解決手段】いくつかの実施形態において、ベッドオブネイル(BON)ゲージ(100)を用いて推定無重力下形状が生成され、次いで第2のゲージ(200)を用いてさらに高い空間分解能で形状が測定されて、BONゲージのピン(110)の間の理論サグが第2のゲージで測定された形状から差し引かれる。別の実施形態において、物体(140)の両面で形状測定が実施され、推定無重力下形状の信頼度を評定するために用いられる。別の実施形態において、ベッドオブネイルゲージ(100)はピン(110)の高さ調節に最小二乗法最小化手順を用いる。
(もっと読む)
産業機械
【課題】 移動機構の揺動を抑えて移動機構を移動させることができ、制御対象物による測定誤差を低減できる産業機械を提供する。
【解決手段】 三次元測定機1は、被測定物を載置するテーブル11と、テーブル11に対して移動可能な支持部213を有し、支持部213で支持されて所定の軸方向へ移動可能に設けられ、プローブ12を所定の軸方向へ移動させる移動機構2と、移動機構2を制御する制御装置と、門型フレーム21に取り付けられ、移動機構2と制御装置とを接続するケーブルを案内して収納するケーブルベア3とを備えるものであって、ケーブルベア3の重心を通ってZ軸方向に延びる重心軸線O−Oが、X軸方向において、支持部213の中心を通ってZ軸方向に延びる支持案内軸P−Pと一致している。
(もっと読む)
三次元測定機
【課題】スピンドル内にエアーバランス機構を備えた構成において、外観を損なうことなく、スピンドルの上下動や測定精度にも影響を与えることが少ない三次元測定機を提供。
【解決手段】エアーバランス機構19を備えた三次元測定機。エアーバランス機構は、Z軸スピンドル12内に設けられたシリンダ20と、このシリンダ内に摺動可能に収納されたピストン29と、このピストンをガイド筒22等に支持する支持軸28と、ピストンで区画されたシリンダ内の押上力発生室201とを備える。プローブ13からの配線13Aを、シリンダの外面に接触させることなく、スピンドルの内面とシリンダの外面との間を通してスピンドルの外部へ導く誘導路43がZ軸スピンドル12の内部に形成されている。
(もっと読む)
産業機械
【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
外骨格を有するCMMアーム
【課題】外骨格および伝達手段を有するCMMアームを提供する
【解決手段】 ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
(もっと読む)
形状測定装置
【課題】プローブの運動の履歴に基づく測定誤差を補正することができ、測定精度を向上させることができる形状測定装置の提供。
【解決手段】形状測定装置1は、装置本体2と、装置本体2を制御する制御手段3とを備える。装置本体2は、プローブ4を備え、プローブ4は、被測定物に接触する測定子を先端側に有する棒状のスタイラス41と、スタイラス41の基端側を支持する支持機構42とを備える。支持機構42は、スタイラス41の位置を検出するプローブセンサ421を備え、スタイラス41を一定の範囲内で移動可能に支持する。制御手段3は、プローブセンサ421にて検出されるスタイラス41の位置を入力とし、測定子、及び被測定物の接触する位置を出力とする伝達関数に基づいて、測定値を算出する。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
ガード・フランジ巾測定器
【課題】持ち運びが容易で、測定値のばらつきを抑えて、高精度で、容易かつ効率的にフランジウェー巾等を測定することができるガード・フランジ巾測定器を提供する。
【解決手段】測定部12が、本体部11をレールの上面に設置したとき、本体部11に対し水平面内で所定の方向に突出してスライド可能に設けられている。1対の円柱状の基準片13が、本体部11から下方に互いに平行に伸びて、測定部12のスライド方向に対して垂直方向に所定の間隔をあけて並ぶよう設けられている。円柱状の測定片14が、測定部12から下方に各基準片13と平行に伸びるよう設けられている。表示手段15が、各基準片13の測定片側と反対側の側面に接するレールの内側の側面と、測定片14の各基準片側と反対側の側面に接するレールの内側の側面との距離を表示する。
(もっと読む)
スタイラス摩耗検出方法および表面性状測定機
【課題】スタイラスの摩耗や欠損に対して、スタイラスの交換時期を適正に知らせることができるスタイラス摩耗検出方法および表面性状測定機を提供する。
【解決手段】表面に周期的に変化する凹凸が形成された標準片の表面に沿ってスタイラスをトレースしながら、そのトレース方向に対して交差する方向のスタイラスの変位を検出し、この変位から標準片の測定曲線を取得する測定曲線取得工程と、測定曲線に対して周波数解析を行う周波数解析工程と、この周波数解析工程で得られた周波数解析結果からスタイラスの摩耗量を演算する摩耗量演算工程と、この摩耗量演算工程で演算された摩耗量を表示する摩耗量表示工程と、を備える。
(もっと読む)
ワイヤハーネス寸法検査具及びワイヤハーネス寸法検査方法
【課題】短時間で正確にワイヤハーネス寸法を検査することのできるワイヤハーネス寸法検査具及びワイヤハーネス寸法検査方法を提供すること。
【解決手段】ワイヤハーネス13の載置面29に、基端ガイド31と指標ガイド33とを設けて、ワイヤハーネス13の一端部21を基端ガイド31に位置合わせし、ワイヤハーネス13の他端部25が一致する指標ガイド33の指標35にてワイヤハーネス13の寸法L1を検査するワイヤハーネス寸法検査具11であって、載置面29には寸法の方向に延在する基準線部37が設けられ、基端ガイド31は、基準線部37に直交する位置合わせ部39を有し、指標ガイド33は、位置合わせ部39からの寸法L1となる基準線部37の上の点43を通る傾斜辺部45を有し、指標35は、点43を挟み寸法の公差D1の範囲で傾斜辺部45に設けられた異なる表示部51,53を有する。
(もっと読む)
形状測定装置
【課題】測定子の位置を適切に制御することができ、測定子が非接触か否かを適切に判断することができる形状測定装置の提供。
【解決手段】三次元測定機1は、測定子を有するプローブ21と、プローブ21を移動させる移動機構22と、ホストコンピュータ5とを備える。ホストコンピュータ5は、測定子の移動量を取得する移動量取得部52と、測定子を非接触とした状態における基準位置からの測定子の移動量を偏差として取得する偏差取得部54と、偏差取得部54にて取得される偏差が第1の閾値より大きいか否かを判定する判定部55と、判定部55にて偏差が第1の閾値より大きいと判定されると、基準位置と、偏差とを合成した位置に基準位置を更新する更新部56とを備える。
(もっと読む)
121 - 140 / 850
[ Back to top ]