
Fターム[2F062HH14]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | フィーラ端子 (358) | 形状 (346) | 針 (60)
Fターム[2F062HH14]に分類される特許
1 - 20 / 60
表面性状測定機
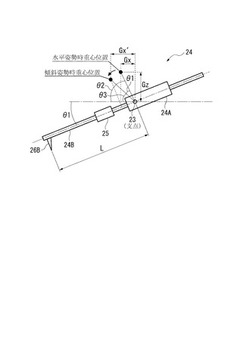
【課題】傾き角度を任意の角度に変更した場合でも正確な測定ができ、メモリ容量も少なく、新たなスタイラスの使用でもユーザに対する作業負担を軽減できる表面性状測定機。
【解決手段】質量の異なる第2測定アーム24Bが取り付けられた測定アーム24の種類毎に、測定アーム全体の質量M、支点(回転軸23)からスタイラス26Bまでのアーム長L、測定アームが水平姿勢時において測定アームの水平方向重心位置Gxおよび上下方向重心位置Gzを記憶した測定アームテーブルと、測定アーム指定手段と、検出手段の傾斜角度θ1を検出する傾斜角度検出器と、指定された測定アームのM、L、GxおよびGzを測定アームテーブルから読み出し、これらと傾斜角度検出器で検出された傾斜角度θ1とから、測定アームの水平姿勢時の測定力と測定アームの傾斜姿勢時の測定力との差を演算し、この差を補正値として測定力を調整する制御装置とを備える。
(もっと読む)
表面性状測定機

【課題】測定アームに最適な測定力を発生させる表面性状測定機を提供する。
【解決手段】表面性状測定機は、ブラケットに回転軸を支点として円弧運動可能に支持される測定アーム、測定アームの先端に設けられたスタイラス、及び、測定アームを円弧運動方向へ付勢するボイスコイルを備え、スタイラスに測定力を付与する測定アーム姿勢切替機構60を備えるスタイラス変位検出手段20と、制御部100と、を具備し、制御部100は、ヒステリシス誤差を取得するヒステリシス誤差取得手段124と、目標測定力を取得する目標測定力取得手段121と、目標測定力及びヒステリシス誤差に基づいて、測定力指令値を算出する指令値算出手段125と、測定力指令値に基づいてボイスコイルに電流を入力する駆動制御手段122と、を備える。
(もっと読む)
触針式測定装置
【課題】触針が測定点の直上に位置している状態において測定対象物の表面の測定点を実質的に真上から検知することを可能とする観察手段を備えた触針式測定装置を提供する。
【解決手段】触針式測定装置100において、長手軸線方向に延在する細長い触針110であって、測定対象物10の表面12の所定の測定点14に運ばれて同測定点14に接触するようにされる尖端部112を有する触針110と、該触針110の周囲の少なくとも一部に配置され、表面12の測定点14及び該測定点14の周囲からの光を受光する受光部130と、を備え、受光部130で受光した光に基づき、測定点14に対する尖端部112の位置決めを行う。
(もっと読む)
表面形状測定用触針式段差計における針飛び抑制方法
【課題】
特に軟らかい試料を針とびがなく、かつ変形が少ない最適の条件で測定できるようにする触針式段差計の針飛び抑制方法を提供すること。
【解決手段】
本発明の針飛び抑制方法は、試料の段差、探針の走査速度、探針先の曲率半径、探針先の形状、探針を試料に押し付ける力、変位センサを支える支点周りの慣性モーメント、及び支点と探針間の距離のパラメーターで決まる探針の飛びの大きさすなわち飛びの高さ、飛び時間、飛び時間中に進む距離を、前記パラメーターの関数として算出して、飛びが起きない条件を予め求め、前記パラメーターに基く測定条件に応じて探針を試料に押し付ける最小限の力を設定することを特徴としている。
(もっと読む)
表面形状測定用触針式段差計の性能改善方法及び該方法を実施した表面形状測定用触針式段差計
【課題】支点上でバランスする探針と変位センサで構成される触針式段差計の感度と変位分解能を向上させる方法及び該方法を実施している表面形状測定用触針式段差計を提供する。
【解決手段】Fを探針に加える力、Iを支点回りの慣性モーメント、rを支点−探針間の距離、zを探針の先端の変位、tを時間としたときに成り立つ、探針の先端の運動方程式F=I/r2d2z/dt2に基づき、探針に加える力に応じて支点−探針間の距離rを決め、支点と探針の先端とを結ぶ線を水平より45度傾け、探針の先端を下げる。
(もっと読む)
層厚測定用試料製造装置
【課題】半導体ウエハ上に形成されたエピタキシャル層の層厚測定用試料を簡便に製造できる層厚測定用試料製造装置を提供する。
【解決手段】エピタキシャル層3が形成されたウエハ片1を、そのエピタキシャル層3の一部を残してエピタキシャル層3をエッチングして層厚測定用試料を製造し、エッチング後のウエハ片1上に段差として残ったエピタキシャル層3の層厚を測定するための層厚測定用試料製造装置10において、ウエハ片1を挟み込む開閉自在の2枚の樹脂板11,12と、これら2枚の樹脂板11,12の一方に設けられ、ウエハ片1上に形成されたエピタキシャル層3の一部をエッチングから保護すべくエピタキシャル層3の一部と密着するエッチング防止ゴム13とを備えたものである。
(もっと読む)
スタイラスアーム
【課題】平面視で直線的な測定経路内に障害部分のある被測定物でも、障害部分に妨げられることなく測定を行えるようにする。
【解決手段】被測定物(B)の表面(H)に接触されるスタイラス(30、32)を有するスタイラスアーム(22)を備え、該スタイラスアームを平面視で1つの軸線に沿って駆動することにより、スタイラスが被測定物の表面の凹凸に従って上下動することに基づいて当該被測定物の表面の粗さや形状を測定する輪郭形状測定装置に用いられるスタイラスアーム。このスタイラスアームは、細長いアーム部(19)と、該アーム部の長さ方向で間隔をあけて設けられ、それぞれ、被測定物の表面に接触可能とされた接触端を有する第1及び第2のスタイラス(30、32)とを有する。
(もっと読む)
表面性状測定機
【課題】測定アームを交換しても、測定アームのバランスを自動的に調整し、使い勝手および作業効率の向上が期待できる表面性状測定機を提供する。
【解決手段】表面性状測定機において、測定アーム24は、ブラケット22に回転軸23を支点として円弧運動可能に支持された第1測定アーム24Aと、これの先端に着脱機構25を介して着脱可能に設けられ先端にスタイラス26A,26Bを有する第2測定アーム24Bとを含んで構成される。測定アームを円弧運動方向へ付勢しスタイラスに測定力を付与する測定力付与手段は、測定アームを回転軸を支点として円弧運動方向へ付勢するボイスコイル62を含んで構成される。第2測定アームの交換後に、ボイルコイルに通電する電流を調整して測定アームのバランスを調整するバランス調整手段が設けられる。
(もっと読む)
表面性状測定機
【課題】高精度で、しかも、スタイラスや測定アームなどの汚破損を少なくできる表面性状測定機を提供する。
【解決手段】表面性状測定機において、測定アーム24は、ケーシング28内においてブラケット22に回転軸23を支点として円弧運動可能に支持された第1測定アーム24Aと、これの先端に着脱機構25を介して着脱可能に設けられ先端にスタイラス26A,26Bを有する第2測定アーム24Bとを含んで構成され、着脱機構はケーシング内に配置される。測定アームの円弧運動量を検出する変位検出器27は、測定アームに配置されたスケール27Aと、ブラケット22にスケールに対向して配置された検出ヘッドとを含んで構成され、スケールの検出面が測定アームの軸線上で測定アームの円弧運動面上に配置される。
(もっと読む)
下地材探知具
【課題】探知針の差し込み作業中でも、測定筒体に嵌挿している目盛を指示する測定体が、確実に差し込み深さ目盛を指示し、測定位置の高低にも拘らず測定作業をスムーズに処理できる下地検知具を提供する。
【解決手段】探知針jを出入する針孔を有する筒体a内に一端部が嵌挿し、他端部17が飛出し、且内挿するコイルスプリングの付勢によって押圧される前記探知針jを飛出せしめる測定筒体dを有する下地材探知具において、前記測定筒体dの外周面部13に飛出した探知針jの長さに比例する目盛14を付記せしめると共に、前記測定筒体dに嵌挿する測定体kを嵌挿せしめた。
(もっと読む)
円環状測定物の軸方向形状測定用治具及び軸方向形状測定装置
【課題】円環状測定物の測定点における外周位置及び内周位置の各軸方向形状を正確に測定するための円環状測定物の軸方向形状測定用治具及び軸方向形状測定装置を提供すること。
【解決手段】円環状測定物8の軸方向形状測定用治具1は、円環状測定物8の測定点Pにおける外周位置及び内周位置の各軸方向形状をそれぞれ測定する際に用い、架台2、回動軸3、回動ベース4及び保持する複数の保持クランプ41を備えている。複数の保持クランプ41は、回動軸3の回動中心Aに円環状測定物8の測定点Pを合わせて円環状測定物8を保持する。回動ベース4は、回動軸3の回動中心Aを中心に回動することによって測定点Pを中心に回動して、測定点Pの外周位置を所定の測定方向に向けた第1回動位置401と、測定点Pの内周位置を所定の測定方向に向けた第2回動位置とに回動停止させる。
(もっと読む)
形状測定センサ
【課題】被検物を傷めることなくより短時間で表面形状測定を行うことができる形状測定センサを提供する。
【解決手段】被検物100の表面形状を測定するための形状測定センサ1は、自身の軸方向に摺動可能に支持され、軸方法に摺動することにより被検物の表面形状に追従するプローブ11と、プローブを軸方向に摺動可能に支持する静圧軸受12と、プローブを、その摺動範囲内における中間部の所望の位置に位置決めして保持する第一の状態と、プローブの摺動に干渉しない第二の状態とに切り替え可能なストッパ部60とを備えることを特徴とする。
(もっと読む)
座標測定用ヘッドユニット及び座標測定機
【課題】小型、安価で、高速の高精度測定が可能であり、工作機械における機上測定や搬送ラインでのインサイト測定が容易な、座標測定用ヘッドユニットを提供する。
【解決手段】座標測定用ヘッドユニット10において、コンピュータ数値制御によりプローブ12を互いに直交する複数の駆動軸に沿って移動させ、測定対象に当接させて測定対象の寸法を計測するための駆動手段(X軸駆動部14、Y軸駆動部16、Z軸駆動部18)と、該駆動手段14、16、18を収めるための一体化された筐体13と、該筐体13のいずれかの側面に設けられた、前記駆動手段14、16、18のいずれか一つを支持体(ベース30に固定されたスタンド32上のサポート34)に取付けるための取付手段(取付面20)と、を備える。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
測定システム
【課題】高速で、振動と測定誤差の少ない座標測定システムを提供する。
【解決手段】座標測定システムの可動サポートに着脱可能に接続されるコネクタを備えるアナログ走査プローブ120であり、走査プローブは、測定軸63に従って当該走査プローブに回動可能に接続される針部28の先端の接触部30と、前記測定軸63についての前記接触部30の傾き角の測定を行う位置エンコーダと、を含み、前記コネクタと前記測定軸63との間に走査プローブ又はプローブの一部を傾けてプローブの走査を可能とする1つの関節64が備えられる。
(もっと読む)
リード構造の算出方法
【課題】
少なくとも一部円筒状の加工品の表面粗さにおけるリード構造の算出方法を提供する。
【解決手段】
少なくとも一部円筒状の加工品の表面粗さにおけるリード構造の、本発明による算出方法では、対象となる加工品の表面領域に、この加工品の軸方向に延び、円周方向に互いに間隔をあけた複数の触針断面が実行され、この場合、触針断面によって得られる測定値に基づいて、リード構造の少なくとも1つのパラメータが算出される。本発明によると、第1触針断面に帰属する測定値に基づいて、リード構造の少なくとも1つのパラメータの推定値が算出され、この場合、少なくとも1つの第2触針断面に帰属する測定値に基づいて、この推定値が補正される。
(もっと読む)
ナノ粒子の表面粗さ測定方法
【課題】直接ナノ粒子の表面粗さを精度よく測定する。
【解決手段】原子間力顕微鏡を用いてナノ粒子の表面粗さを測定する方法は、表面にアミノ基を有する基板上にナノ粒子分散液を塗布して乾燥させることにより基板上にナノ粒子を固定する工程1と、工程1でナノ粒子を固定した基板を原子間力顕微鏡の試料台に設置する工程2と、工程2で原子間力顕微鏡の試料台に設置した基板上に固定されたナノ粒子の表面粗さをプローブを用いて測定する工程3とを含む。
(もっと読む)
微小表面形状測定プローブ
【課題】プローブと被測定物との接触圧を従来よりもさらに微小に調整できる微小表面形状測定プローブを提供する。
【解決手段】微小表面形状測定プローブは、被測定物1と接触する接触子を2先端に有するプローブシャフトと、プローブシャフトに与える付勢力に対する反力が作用するようにプローブ本体に組み込まれた圧電センサと、圧電センサに作用する荷重を測定する荷重検出部と、荷重検出部により検出された荷重に基づいて、付勢装置による付勢力を調整する制御部と、接触子2を通して被測定物1との接触点へレーザ光を照射し、接触点で反射されたレーザ光を検出することで、接触子2と被測定物1との接触を感知する接触感知装置と、を備える。
(もっと読む)
変位測定装置
【課題】第2被測定部の変位が時間軸に対して急激に変化するような場合であっても第1被測定部に対する第2被測定部の相対変位を正確に測定することが可能な変位測定装置を提供する。
【解決手段】外軸(第1被測定部)11に固定されるセンサ本体部31と、このセンサ本体部31に対して出退可能な触針部32と、この触針部32を内軸(第2被測定部)12に従動させる従動手段とを備え、センサ本体部31に対する触針部32の出退量を検出することにより外軸11に対する内軸12の相対的な変位を測定する変位測定装置で、触針部32をセンサ本体部31に対して弾性付勢することなく出退自在に保持し、内軸12側に設けられた磁石(保持部)35に、触針部32側に設けられた鉄製の接触子(被保持部)42を吸着させることにより触針部32を内軸12に従動させるように構成する。
(もっと読む)
1 - 20 / 60
[ Back to top ]