
Fターム[2F063EA03]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定機器 (264) | エンコーダー (228) | ロータリーエンコーダー、角度スケール (150)
Fターム[2F063EA03]に分類される特許
1 - 20 / 150
回転角度検出装置
回転角度検出装置
カメラ支持装置
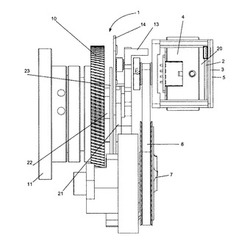
【課題】プロ用ビデオカメラを反復可能な位置へ精密位置調整する。
【解決手段】駆動列手段1と、駆動列手段10の回転出力手段11に装着された第1誘導位置センサ23,14と、駆動列手段1に動作接続された回転入力デバイス4に装着された第2誘導位置センサ2,3とを包含し、第1位置センサ23,14により検知されるインダクタンスが回転出力手段11の回転変位を表して、第2位置センサ2,3により検知されるインダクタンスが回転入力デバイス4の回転変位を表す、ビデオカメラを支持するためのカメラ支持装置である。
(もっと読む)
回転情報算出装置、ステアリング装置、電動パワーステアリング装置、センサ付き軸受装置、車両、異常検出装置、回転情報算出方法及び異常検出方法

【課題】3相の磁気検出器の磁気検出信号の異常を検出することが可能であり、異常発生後も、3相中の2相の磁気検出信号が正常な場合に、継続して回転情報の計算を正確に行うことが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号のサンプリング値a、b、cを取得し、取得したサンプリング値に基づいて、各相に対する回転角度位置を算出する。そして、これら算出した回転角度位置に基づき各相のサンプリング値の異常を検出するとともに、1相のサンプリング値のみに異常が検出されたときは、異常検出フラグを出力すると共に残りの2相のサンプリング値で回転角度位置の算出を行う。2相以上のサンプリング値の異常が検出されたときは、回転情報算出装置の動作を停止する。また、正常な相のサンプリング値に基づいて算出した回転角度位置の平均値を出力用の回転角度位置として算出する。
(もっと読む)
センサ装置
【課題】被検知体の所定の面とこの所定の面に当接するセンサ装置の当接面との気密をより確実に保持できるセンサ装置を提供する。
【解決手段】被検知体TVに固定され、被検知体TVの有する動作部MPの移動または回転を検知するセンサ装置1であって、被検知体TVの所定の面に当接するセンサ装置1の当接面11aと被検知体TVの所定の面とが気密に保持された状態で被検知体TVに固定されるセンサ装置1において、センサ装置1の外形を形成するケース11は、当接面11aと、当接面11aの外周を囲うように当接面11aの裏面方向に突出して形成された側壁11bとを有し、側壁11bの複数箇所はケース11の外周部から内部方向に入り込んだ形状に形成されていることを特徴とするセンサ装置。
(もっと読む)
物理量検出装置
【課題】ICパッケージの回路面に電荷が帯電するのを防止可能な物理量検出装置を提供する。
【解決手段】ICパッケージ20は、弁軸12の回転角の変化に応じた信号を出力する磁気検出素子21、当該磁気検出素子21を覆う封止体22、および、磁気検出素子21に電気的に接続するとともに封止体22から突出するよう設けられる端子31、32、33を有している。カバー部材40は、磁気検出素子21が前記信号を出力可能なようICパッケージ20を収容している。ターミナル部材70は、導電性を有する材料により形成されている。ターミナル部材70は、ICパッケージ20のグランド用の端子32に電気的に接続するとともに封止体22に当接するようカバー部材40に設けられている。ターミナル部材70は、磁気検出素子21に電力を供給する電源の負極側に電気的に接続される。
(もっと読む)
演算装置、相対移動量測定装置、および、演算方法
【課題】位相の異なる1対の入力信号から出力を得る演算においては、arctan等の複雑な演算が必要となり、演算回路の負荷が大きくなってしまう。また、演算回路の負荷を軽減するためにルックアップテーブルを参照して出力を得る場合、必要なメモリが大きくなってしまう。
【解決手段】位相の異なる1対の入力信号IN1、入力信号IN2に対して、関数Fを用いて、入力値XをX=F(IN1、IN2)と定義する。入力値Xと出力値Yの関係を慨ね線形となるように関数Fを定義することにより、複雑な演算を使用することなく入力信号から予想される出力値を得ることが可能となる。ルックアップテーブルを参照する場合は、出力値と予想される出力値との差分のみをテーブル化しておくことにより、メモリを削減可能となる。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
モータ及び電動パワーステアリング用モータ
【課題】ロータの回転位置の検出精度を向上して、トルクリップルの低減、出力向上に寄与できるモータを提供する。
【解決手段】モータMの回転軸22にはホルダ31を用いてセンサマグネット32が保持されるのに対し、そのセンサマグネット32と軸方向に対向配置された磁気センサ44が回路基板43上に設けられている。そして、センサマグネット32の各磁極部の外周面には磁気誘導部51,52が当接して設けられ、各磁気誘導部51,52は、磁気センサ44と径方向に対向する位置まで延び、センサマグネット32により生じる磁束を磁気センサ44上に誘導する。
(もっと読む)
回転角度検出装置
【課題】 安価で耐久性のあるレゾルバを使用しながら、絶対的な回転角度位置を認識することが可能な回転角度検出装置を提供する。
【解決手段】 回転角度検出装置は、レゾルバ14におけるロータ32の外周部に90度の角度毎に配設された4個のホールIC41、42、43、44と、ロータ32に付設された磁石37とを備える。磁石37は、ロータ32の外周部の約100度の角度範囲に至る領域に配設されている。この磁石37は、ロータ32と同期して回転し、その回転角度位置に対応して、4個のホールIC41、42、43、44のうちの1個のホールIC、または、隣接する2個のホールICが磁気を検出する。
(もっと読む)
回転角検出装置
【課題】構成部材の組み付けの確認作業を容易に行うことができる回転角検出装置を提供する。
【解決手段】主動ギア、従動ギア50、磁石60と、磁気センサ81と、従動ギア50の回転軸方向への移動を規制するホルダ70と、これらを収容するケース20とを備える回転角検出装置において、従動ギア50は、ケース20に回転可能に軸支され、ホルダ70は、従動ギア50の軸受と反対側の部位に接触した状態で装着され、カバー30のホルダ70に対向する部位には、弾性変形可能とされた規制部材35を設け、カバー30を軸受と反対側からホルダ70に対向してケース20に取り付けたとき、規制部材35は、ホルダ70が存在しない場合には、従動ギア50と係合してこれの回転を規制する一方、ホルダ70が存在するときには、ホルダ70との接触により弾性変形して従動ギア50とは係合しない回転角検出装置。
(もっと読む)
作業車両
【課題】操向位置を検出する検出センサをシンプルな構成で容易に走行機体側へ設置できるとともに、設置した検出センサが圃場から飛散した泥水等の付着によって故障することを防止できる作業車両を提供することを課題としている。
【解決手段】操向位置を検出する検出センサ48を備えた作業車両であって、ステアリングシャフト33の回転を減速して前記検出センサ48に伝える減速機構47を、該ステアリングシャフト33に設け、検出センサ48からのステアリングシャフト33の回転によって、操向位置を検出する。
(もっと読む)
回転角センサ
【課題】検出精度を向上することの可能な回転角センサを提供する。
【解決手段】第1、第2センシングIC20、30は、スロットル弁の回転により変化する磁界に応じた信号を出力する磁気検出素子21、31、この磁気検出素子21、31を覆うモールド体22、32、並びに、一端が磁気検出素子21、31に接続され他端がモールド体22、32から突出して回路基板12に電気的に接続される第1リード23、33及び第2リード24、34を有する。樹脂体60は、磁気検出素子21、31が埋め込まれた位置に対応する正面221、321及び背面222、322を除くモールド体22、32、第1リード23、33、第2リード24、34、及び回路基板12を封止する。これにより、第1、第2センシングIC20、30と回路基板12が設けられたハウジングカバー10とが樹脂体60により固定される。
(もっと読む)
回転角度検出装置、、回転角度検出方法、部品実装装置
【課題】回転軸VAを中心とする回転動作の他に回転軸VA方向への移動も移動部材85が行なう構成において、移動部材85の回転角度θeを磁気センサにより高精度に検出することを可能とする。
【解決手段】磁石91とホールIC921、922との回転軸VA方向への距離hが所定の検出距離となる検出位置Pdに移動部材85がある状態でのホールIC921、922の出力信号Ss、Scに基づいて、アーム61bに対する移動部材85の回転角度θeを検出する。したがって、ホールIC921,922と磁石91との距離の変化による影響を排して、ホールIC921,922の出力信号Ss、Scから、アーム61bに対する移動部材95の回転角度θeを高精度に検出することが可能となる。
(もっと読む)
回転角度センサのフェール検知装置
【課題】被検知体に対応する回転角度センサがひとつであっても、回転角度センサのフェールを確実に検知できる回転角度センサのフェール検知装置を提供する。
【解決手段】カム25を、電動モータ1によって一方向に回転駆動されてプッシュロッド35を往復動作するように構成し、角度センサ21の出力電圧Sは、第1の所定電圧V1以下の領域および第1の所定電圧V1より大きい第2の所定電圧V2以上の領域が不感帯Dとして認識する。プッシュロッド35と当接するカム25のカム面を作動面側から非作動面側に移行させる際に、非作動面の所定位置まで一定速度でカム25を回転駆動させる。カム25の非作動面内でかつ所定位置までの間の位置に不感帯Dを配設する。不感帯Dに移行後の経過時間をタイマ54で計測し、不感帯Dの通過予定時間が経過したにもかかわらず不感帯Dに対応する出力電圧Sが検知された場合にフェール状態と判定する。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置
【課題】簡単な構成でメインギヤと検出ギヤ間のバックラッシによる検出誤差を補正し、精度の高い回転角度を検出できる回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】回転検出手段から出力される検出信号に基づいてステアリングシャフトの回転角度を演算するともに、ステアリングシャフトの回転角速度が所定値以上である場合に、操舵トルク検出手段により検出される操舵トルクに基づいて演算されるトーションバーの捩れ角と、ステアリングシャフトの回転角度との差分から、メインギヤと検出ギヤ間のバックラッシによる誤差を補正するためのバックラッシ補正値を演算する回転角度演算手段と、バックラッシ補正値に基づいてステアリングシャフトの回転角度を補正する回転角度補正手段とを備える。
(もっと読む)
レゾルバ、及びこれを備えたレゾルバ付き軸受
【課題】 よりコンパクト化を図ることができるレゾルバ、及びこれを備えたレゾルバ付き軸受を提供する。
【解決手段】 本発明のレゾルバ付き軸受は、シャフトの回転を検出するレゾルバセンサ部3を備えている。このレゾルバセンサ部3は、ロータの周囲に配置された環状のステータ11と、ステータ11に外嵌されてロータ及びステータ11を覆うケース5と、を備えている、ステータ11は、内周側にティースが形成された環状のステータコア12と、インシュレータ13,14と、インシュレータ13,14を介してティース12aに巻回されたコイルと、を備えている。第一インシュレータ13には、シャフトSの回転の検出結果を出力するためのハーネス16と、コイル15から延びるリード線15aとを、ハーネス16がシャフトSの軸方向に延びた状態で接続する接続部20が設けられている。
(もっと読む)
回転機械用物理量測定装置
【課題】エンコーダ1aと組み合わせて使用するセンサ10、10の個数を、3個のみと、少なくした状態で、前記エンコーダ1aを外嵌固定した回転部材の5方向の変位x、y、z及び傾きφx、φzを測定できる構造を実現する。
【解決手段】前記エンコーダ1aとして、被検出面である外周面に、複数の特性変化組み合わせ部3a、3aを円周方向に等ピッチで形成したものを使用する。これら各特性変化組み合わせ部3a、3aは、前記エンコーダ1aの軸方向に対して互いに逆方向に傾斜した第一凹溝11a及び第二凹溝11bから成るものとする。前記エンコーダ1aの外周面のうちで円周方向の位相が互いに異なる部分に、3個のセンサ10、10の検出部を対向させる。これにより、これら各センサ10、10の出力信号から得られる情報に基づいて、前記5方向の変位x、y、z及び傾きφx、φzを算出可能とする。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて、第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて前記第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、第2位置情報の相対的な変位を検知した場合に、第2位置情報の変位に応じて補正テーブルを生成する補正テーブル生成部とを備える。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す第1の補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、予め生成されている複数の補正テーブルの中から、第2位置情報の相対的な変位に応じて第2の補正テーブルを選択し、選択した第2の補正テーブルに基づいて、第1の補正テーブルを変更する補正テーブル変更部とを備える。
(もっと読む)
1 - 20 / 150
[ Back to top ]