
Fターム[2F063GA07]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846) | インダクタンスの変化を検出 (379) | 空隙変化型 (50) | 回転変位型 (16)
Fターム[2F063GA07]に分類される特許
1 - 16 / 16
スパイラルインダクタと発振器を用いた計測装置

【課題】本発明は、スパイラルインダクタ間に発生する相互インダクタンスの変動や、スパイラルインダクタンスの金属や比透磁率が1とは大きく違う物質を利用した自己インダクタンスの変動を利用した、交角や回転角度,位置、速度、加速度、傾き、振動などの計測を行う装置に対する、ノイズに強い測定手法を提供する。
【解決手段】本発明は、前記スパイラルインダクタを含めて構築された発振器を用いて、相互インダクタンスの変動や自己インダクタンスの変動を発振周波数の変動として検出するため、ノイズに強く、センサー部から測定部までの距離がある程度離れていても問題なく安易に安価に測定できるシステムを構築する。
(もっと読む)
位置センサ

【課題】サーチコイルに対する励磁信号のノイズ的影響を除去することでセンサ出力のS/N比を向上させ、検出誤差を低減すること。
【解決手段】ロータリーエンコーダ1は、ステータコアと、ステータコアと隙間を介して対向しながら回転可能に設けられるロータコアと、ロータコアに設けられ、所定のピッチでジグザグに折り返された励磁コイルと、ステータコアに設けられ、励磁コイルと隙間を介して対向して配置され、所定のピッチでジグザグに折り返されたサーチコイル23と、励磁コイルに供給される励磁信号を出力する励磁信号出力回路31,32,33と、励磁信号と同位相又は逆位相の信号をサーチコイル23から出力されるサーチ信号に注入して合成する注入回路35とを備える。
(もっと読む)
結合同調回路を使用して2つの物体の相対位置を検知する電磁方法
トンネル掘進システム、水平方向測定方法
【課題】トンネル掘進機の水平方向を測定できるようにする。
【解決手段】本発明の水平方向測定方法は、非開削で地中を掘削するトンネル掘進機の水平方向を地上で測定する。水平方向測定方法では、トンネル掘進機の先導体内に、当該先導体の進行方向に対してあらかじめ定めた角度だけ異なる水平方向に磁力線が向くように磁界を発生させる発信部を取り付けておく。そして、地上で、磁界測定ステップと水平方向検出ステップを行う。磁界測定ステップは、磁力線を検出する受信コイルの鎖交面の法線方向を水平に維持して、鎖交面の法線方向が変化するように回転させながら、受信コイルに生じる電圧を測定する。水平方向検出ステップは、測定した電圧が最小となるときの鎖交面の法線方向に垂直な水平方向に対して前記あらかじめ定めた角度だけ異なる水平方向を検出する。
(もっと読む)
漏洩磁束検出型回転位置検出装置を組み込んだ液密サーボモータ装置
【課題】小型化、液密構造に適し、温度ドリフト補償に優れ、検出信号の伝送路のインピーダンス変化の影響を受けにくい回転位置検出装置を備えたサーボモータ装置を提供する。
【解決手段】サーボモータ1と共に液密にケーシング4内に収納されたセンサ10は、サーボモータ回転子から生じる漏洩磁束を検知する複数のコイルを備え、各コイルに対応して高透磁率磁性体がそれぞれ近接配置され、該高透磁率磁性体においては回転位置に対応する漏洩磁束の変化に応じて磁気飽和が生ぜしめられる。各コイルは磁気飽和の変化特性に応じて、回転位置に対応した振幅関数を持つ交流信号を出力する。正弦関数的振幅特性の2つのコイルは漏洩磁束の変化に対して互いに逆相となるように配置され、余弦関数的振幅特性の別の2つのコイルも同様に互いに逆相となるように配置される。この出力交流信号を合成して、電気的位相によって回転位置を示す検出信号を生成する。
(もっと読む)
ロータリセンサ
【課題】 取付性が向上したロータリセンサを提供する。
【解決手段】 ロータリセンサ1は、車体Bに設けられた被保持凸部B1を挟むことで車体に対する回転を禁止されるとともにコイル31を収納したハウジング2と、導電体からなりスタンドSに対して固定され車体Bに対するスタンドSの回転に伴ってハウジング2に対して回転するロータ4と、ハウジング2に設けられた軸受け穴に挿通されるとともに第1ピボットボルトPBに対し中心軸を揃えて螺合する軸部51及び軸部51の一端に連結されて軸部51の径方向に突出し車体Bとの間にハウジング2を挟む頭部52を有する第2ピボットボルト5とを備える。第2ピボットボルト5によってハウジング2とロータ4とが一括して取り付けられるから、ハウジング2とロータ4とが個別に取り付けられる場合に比べて取付性が向上する。
(もっと読む)
エンコーダ及びこのエンコーダを操作する方法
【課題】停電時のエネルギー消費を低下させた絶対位置測定用エンコーダを提供する。
【解決手段】励磁電流Iが、スイッチ素子2.25を切り替えることによってターンオン期間を有するターンオンパルスで生成されること、及び、前記ターンオンパルスの立ち下りエッジ後の領域内で位置情報を算出するため、第1検出巻線2.221および第2検出巻線2.222内で誘導した少なくとも1つの電圧(U1,U2,U3,U4)が測定される。
(もっと読む)
誘導式位置センサ
位置センサは、外側ループ部分および内側ループ部分の双方を有するトランスミッタコイルを有する。レシーバコイルがトランスミッタコイルのごく近傍に配置されており、レシーバコイルは、第1のループと、反対方向に巻かれた第2のループとを含む。レシーバコイルは、トランスミッタコイルとレシーバコイルとの誘導結合によってトランスミッタコイルが励起されると、電気出力信号を生成する。可動のカプラー素子は、トランスミッタコイルとレシーバコイルのループとの誘導結合を、カプラー素子の位置の関数として変化させる。 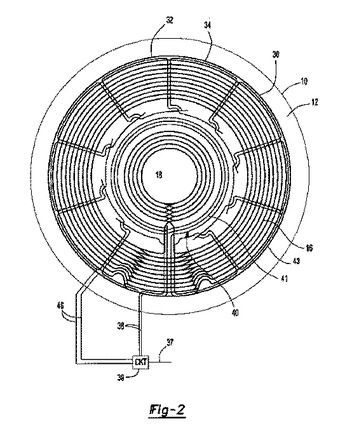 (もっと読む)
(もっと読む)
インダクタンス式回転角度検出装置及びそれを備えたモータ駆動式の絞り弁制御装置
【課題】
スロットルシャフトの端部にインダクタンス式の非接触式回転角度検出装置をコンパクトに形成した信頼性の高いモータ駆動式の絞り弁制御装置を得る。
【解決手段】
本発明は絞り弁が取付けられた回転軸の先端部に励起導体を取付け、ギアカバーに窓孔を設け、この窓孔から回転軸側の励起導体に対面するようにして励磁導体と信号発生導体が形成された固定基板をギアカバーに取付け、ギアカバーの窓孔部を薄い遮蔽部材で覆う。励磁導体と信号発生導体を回転体側の励起導体が配置された空間から遮蔽でき、回転体側の環境に影響されることのない信頼性の高いインダクタンス式の非接触式回転角度検出装置を備えたモータ駆動式の絞り弁制御装置が得られる。
(もっと読む)
ステアリング角度センサ
ステアリング角度及びトルクセンサ、並びに他のタイプの回転又は線形位置センサを含むセンサを提供する。ステアリングコラムのようなシャフトの角度位置を判断するための装置は、コイルアセンブリ、コイル支持体、及びシャフトの角度位置と相関性があるカプラ角度位置を有するカプラ要素を含む。コイルアセンブリは、送信機コイル及び少なくとも1つの受信機コイルを含み、カプラ要素は、送信機コイルと少なくとも1つの受信機コイルとの間の誘導結合を変更する。信号処理回路は、コイルアセンブリからコイル信号を受け取り、受信機信号と、軸線方向変位と相関性があるが、それ以外は実質的に角度位置と無関係である基準信号とを用いて角度位置を判断する。基準信号をレシオメトリック感知に用いて、実質的に共通モード因子を排除し、かつシャフトの回転数を判断することもできる。複合角度及びトルクセンサは、トーションバーにわたるより角度を更に判断する。 (もっと読む)
電気機械用検出装置
提供されねばならないのは位置を判定するための可動電気機械用の安価な検出システムであって、検出信号が零通過を備えていなければならない。これは例えば、U形ヨーク(3)と磁気量を検出するためにヨーク(3)の内部/表面に配置されるセンサ(10)とを有する検出装置(1)によって達成される。ヨーク(3)の一方の自由端に2つの逆向きの磁石または方向性磁石(6〜9)が配置されている。機械構成部品(2)の磁極歯(11、12、13)の1つに対する磁石(6〜9)の位置に依存して、センサ(10)によって検出可能な逆向きの磁束をヨーク(3)内で発生することができる。そのことから、複数の測定センサを利用する必要もなしに、例えばリニアモータを制御するために概ね正弦波状のセンサ信号を得ることができる。 (もっと読む)
マルチターン用非接触式角度位置センサ
【課題】より優れた分解能と直線性精度のマルチターン用回転位置センサの提供。
【解決手段】この角度位置センサは、主歯車と、第1および第2の歯車と、第1および第2の角度位置センサアセンブリとを含む。主歯車は、シャフトに搭載することが可能であり、および、この外周に形成される複数の歯を有する。第1および第2の歯車は、主歯車の歯と係合する第1および第2の歯をそれぞれに有する。第1および第2の角度位置センサアセンブリは、それぞれに第1および第2の歯車と共に回転するように連結される第1および第2のカプラディスクをそれぞれに含む。第1および第2の角度位置センサアセンブリは、第1および第2のカプラディスクの360度の一回転に対応する第1および第2の出力信号をそれぞれに生成する。PWM生成器が第1および第2の出力信号に従ってPWM出力を生成する。
(もっと読む)
連結シャフト及び連結シャフトを用いた角度センサ
【課題】実作業の厳しい環境において、シャフトに対し大きな荷重が加わっても破損することなく機器の性能を保つことのできるシャフト構造および角度センサの角度検出部の破損を防止し誤差を発生させない構造を提供することにある。
【解決手段】回動可能なようにケースに保持され凸部先端を有する駆動シャフトと、凹部先端を有して先の凸部先端と空間を介して嵌め合い構造で回動方向に変位を伝達し軸方向の変位は伝達しないように結合される被駆動シャフトとを具備する連結シャフトとし、さらにこの連結シャフトの被駆動シャフトの先端側に角度検出部を設けて先の駆動シャフトの回動変位を検出する角度センサとする。
(もっと読む)
測定器
【課題】 操作性が高く、かつ、検出精度、検出分解能が高い測定器を提供する。
【解決手段】 スピンドル300の回転に応じてスピンドル300の異なる回転角に対して異なる値の位相信号を発信する位相信号発信手段400と、位相信号を演算処理してスピンドルの絶対位置を求める演算処理部500と、を備える。位相信号発信手段は、位相信号を所定のピッチで発信する。スピンドル300の異なる回転角に対して位相信号は異なる値であるので、位相信号からスピンドル300の回転角が一義的に決定される。インクリメンタル式と違って、位相信号の読み飛ばし等が問題とはならないので、スピンドル300の高速回転を許容して測定器の操作性を向上させることができる。さらに、位相信号の読み飛ばしが問題とはならないので、スピンドル300の回転に対する位相信号の変化を細密化できる。
(もっと読む)
回転角センサ
【課題】 ステアリングシャフトの絶対角度の検出と非接触電力電送とを同時に行うことができる回転角センサを提供すること。
【解決手段】 回転角センサ1は、受信コイル群32、42と、可動コイル331と、円環状励磁コイル群31、41と、信号処理部6と、を備える。受信コイル群32、42は、円環状励磁コイル群31、41が交番磁界を連続して励磁すると、可動コイル331、43の回転角度のみに応じた電圧信号を出力し、可動コイル331には、誘導起電圧が発生する。この電圧信号は、ステアリングシャフトの絶対角度に対応するので、信号処理部6は、電圧信号に基づいて、ステアリングシャフトの絶対角度を算出することができる。一方、可動コイル331には誘導起電圧が発生するので、円環状励磁コイル群31と可動コイル331との間で非接触電力電送が行われる。
(もっと読む)
近接センサを使用した耐放射線回転検出装置による高精度位置検出制御方法及びこの方法に使用する装置
【課題】
構造が簡単な近接センサを使用した耐放射線回転検出器を使用し、ステッピングモータのパルス制御を監視することにより、高放射線環境下においても当該ステッピングモータによる直線移動対象物体の高精度の直線位置の検出、制御を可能にした。
【解決手段】
ステッピングモータ1の回転運動を直線運動に変換する直線移動機構2を介して移動対象物体5を直線移動させる装置において、上記ステッピングモータ1の回転軸1aに接続された同期回転軸7を軸支した回転検出装置6を設け、この同期回転軸7に羽根車8を設け、この羽根車8の羽根8bの一つにそれぞれ対向する位置に第1近接センサPX−A及び第2近接センサPX−Bを固定し、これらの第1近接センサPX−Aと第2近接センサPX−Bとは、一方のセンサが上記羽根の一つに完全に対向したとき他方のセンサは上記羽根の他の一つに半分対向する位置になるように設けた。
(もっと読む)
1 - 16 / 16
[ Back to top ]