
Fターム[2F063GA58]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 磁束の方向を検出するもの (17)
Fターム[2F063GA58]に分類される特許
1 - 17 / 17
検出装置の製造方法及び検出装置付き部品並びにスロットル制御装置
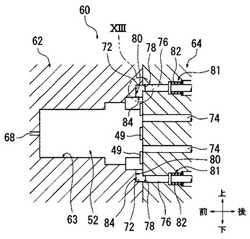
【課題】金型のキャビティに対する充填樹脂量のばらつきを防止する。
【解決手段】磁気検出部材をインサートして発泡樹脂でモールドすることにより回転角検出装置を成形する金型60に、キャビティ63に連通されかつキャビティ63を流動する溶融した発泡樹脂52の先端部を受入れ可能な捨てキャビティ80が設けられる。金型60を用いて、キャビティ63に溶融した発泡樹脂52を射出、充填し、その発泡樹脂52を発泡させてキャビティ63に充満させるとともに、余剰分の発泡樹脂84を捨てキャビティ80にオーバーフローさせる。
(もっと読む)
回転角度検出装置およびステアリング装置

【課題】回転角度検出装置において、回転部品の回転角度を検出するために互いに連動する主回転部品および副回転部品から構成される回転部品群の設計の自由度を大きくする。
【解決手段】回転角度検出装置4は、回転中心線Lを中心にステアリング装置1の出力軸21と一体に回転する主回転部品41と、所定回転比で主回転部品41と連動して回転する第1,第2副回転部品51,61と、第1,第2副回転部品51,61の第1,第2回転角度θ1,θ2に応じた第1,第2検出信号S1,S2を出力する第1,第2磁気抵抗素子71,72と、第1,第2検出信号S1,S2に基づいて操舵角θを検出する回転角度検出手段49とを備える。主回転部品41と第1,第2副回転部品51,61との間での回転の伝達は、主回転部品41および第1,第2副回転部品51,61の接触面42,52;42,62同士の摩擦により行われる。
(もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1及び第2の移動線y1、y2の中間位置に配置される第2のMR回路12と、第2の移動線y2に対し第1の移動線y1とは反対側にd1だけ離間する第3のMR回路13と、位置判定部40とを備える。この位置判定部40は、第1及び第2のMR回路11、12の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第3のMR回路12、13の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
角度測定システム
【課題】 角度測定システムを提供する。
【解決手段】 本開示のいくつかの態様は、回転シャフトの角度の位置を測定する技法に関する。詳細に後述するように、本開示のいくつかの角度測定システムは、所定関係(たとえば所定ギア比)に従って協働して異なる速度で回転する少なくとも2つの磁石を有する。固定されていることが多い2つ以上の磁界検知素子が、シャフトの特定の角度の位置に対して種々の位置で結果的な磁界の方向を測定する。磁界検知素子によって測定される方向に基づき、本技法は、360°を上回る可能性がある回転シャフトの絶対角度の位置を決定することができる。
(もっと読む)
磁界擾乱体の検出方法および検出器、物体の位置の特定方法および特定システム、およびこれらの方法のための記録媒体
【課題】簡単な計算によって、磁界放射体から放射された磁界に対する磁界擾乱体の存在を容易に検出することができる方法を提供する。
【解決手段】この方法は、相異なる所定の位置に配置された少なくとも2つの3軸センサによって、磁界放射体から放射された磁界を測定するステップ(52)と、3軸センサの各々に対して、3軸センサによって測定された磁界から、磁界放射体の幾何学的中心と、3軸センサの幾何学的中心とを通る軸と同一直線上の方向ベクトルの座標を特定するステップ(54)と、各々が方向ベクトルの1つと同一直線上にある複数の軸間の最短距離が、あらかじめ定められた限界値未満であるか否かを検証するステップ(56)と、最短距離が、限界値未満でない場合には、磁界擾乱体が存在しているという通知を行うステップ(64)と、限界値未満である場合には、この通知を行わないステップ(66)とを含んでいる。
(もっと読む)
多周期的絶対位置検出器
本発明は、少なくとも1つの永久磁石を含む磁気位置検出器に関する。また本発明は、トーションバーにより連結された第1のシャフトと第2のシャフトとの間のトルクを検出する磁気装置に関する。本発明の目的は磁化ユニットの多周期的絶対位置を決定する装置を提供することである。従って本発明の主題は、少なくとも磁化ユニット(1)と、第1の磁気感受性プローブ(2)と、第2の磁気感受性プローブ(3)とを含む磁気位置検出器(A)である。第2の磁気感受性プローブ(3)は、この第2の磁気感受性プローブ(3)が作動しているか否かに関係なく磁石(1)の位置に関連する第2のデータを決定するために、絶対的、漸増的、かつ反転可能な方法で、磁場の完全な回転の回数を測定できる。検出器は、第1および第2のプローブ(2、3)にそれぞれ由来する第1および第2のデータに基づいて磁石(1)の絶対位置を計算するモジュールをさらに含む。 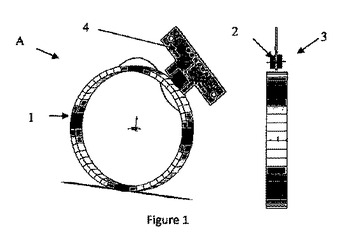 (もっと読む)
(もっと読む)
位置検知入力装置用入力媒体および位置検知入力装置
【課題】入力媒体の傾きが変わっても該磁石の磁界の方向が変わらない特徴を有する位置検知入力装置用入力媒体を提供する。
【解決手段】位置検知入力装置用入力媒体10は、磁石12を載置する空間14が形成され、該空間14内で該磁石12が自在に動くことができるように構成されており、全体としては例えば磁石12を内蔵したタッチペンのような構造からなる。本発明では、磁石12を固定せず自在に動くことができるよう磁石12より大きい空間14を内部に形成し、この空間14内に磁石12を載置することでこの課題を解決している。
(もっと読む)
車両のシフト位置検出装置
【課題】シフトレバーが2軸方向に移動する場合であれ、シフト位置検出装置としての部品点数の増加を招くことなくシフトレバーのシフト位置を検出することが可能な車両のシフト位置検出装置を提供する。
【解決手段】このシフト位置検出装置は、車両のシフトレバーの2軸方向の操作に連動して互いに直交する2軸方向に移動するとともにこの移動に伴ってMREセンサ1に近接するカウンタ磁石2と、MREセンサ1にバイアス磁界を付与するバイアス磁石3とを備えている。そして、カウンタ磁石2がMREセンサ1に近づくときに生じるバイアス磁界の磁気ベクトルの変化をMREセンサ1により感知してカウンタ磁石2のMREセンサ1への近接を検知するとともに、この検知に基づいてシフトレバーのシフト位置を検出する。ここでは、バイアス磁石3の着磁方向とカウンタ磁石2の着磁方向とを互いに直交させるようにしている。
(もっと読む)
空間位置特定装置および特定方法
【課題】簡易な構成で容易に対象物の空間位置を特定することができる空間位置特定装置および空間位置特定方法を提供する。
【解決手段】三次元座標系に配置される磁界発生器2によって、Z軸と平行な向きに磁界Gを発生させて、第一基準点Aに配置される第一磁界検出器3によって、第一基準点Aと磁界Gの発生点CをXY平面に投影した点C1とを通る直線である第一基準線L1がX軸と成す角度である第一角度θ1を検出し、第二基準点Bに配置される第二磁界検出器4によって、第二基準点Bと磁界Gの発生点CをXY平面に投影した点C1とを通る直線である第二基準線L2がX軸と成す角度である第二角度θ2を検出し、原点Oに配置される第三磁界検出器5によって、原点Oと磁界Gの発生点CをYZ平面に投影した点C2とを通る直線である第三基準線L3がY軸と成す角度である第三角度θ3を検出して、磁界発生器2の空間位置を特定する。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、安価な構成で、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】第一または第二の検出手段15または16のいずれかを磁石16Aと、直交配置された複数のホール素子16Bと16Cから形成すると共に、制御手段17がこの複数のホール素子16B、16CとAMR素子15Bからの検出信号を用いて、先ず回転体11の概略の回転角度を検出し、この後、AMR素子15Bからの検出信号を用いて、詳細な回転角度を検出することによって、安価なホール素子16Bや16Cを用いることができるため、安価な構成で、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
操作位置判定装置
【課題】必要とする磁石の数を減らして部品点数を削減し、さらに組み付け性を向上させることができる操作位置判定装置を提供する。
【解決手段】レバーコントロールスイッチ装置1の判定部5は、Z方向の操作位置を判定するため、第1のMRセンサ40の第2のフルブリッジ回路401から出力される出力電圧V12と、第4のMRセンサ43の第2のフルブリッジ回路431から出力される出力電圧V42との差分値を算出し、算出した差分値に基づいてZ=−2mm、Z=0mm、Z=+2mmの3つの操作位置を判定する。判定部5は、3つの操作位置のそれぞれに対応するフルブリッジ回路の組合せに従って、X及びY方向の操作位置を判定する。
(もっと読む)
実質的に不変な回転軸を検出するための方法および装置
【課題】以前の運動予測システムの欠点を解消し、かつ実質的に不変な回転軸を有する移動体の運動を処理するために特に適している方法を提案する。
【解決手段】3本の感知軸を有する少なくとも1つの慣性または磁気センサを備えている移動体の運動の実質的に不変な回転軸を検出するための方法は、前記センサの3本の感知軸に対する、異なる時間での少なくとも3つのサンプルを含む物理測定値を得るステップE10、E31と、物理測定値空間内で、実質的に不変な回転軸を予測するステップE11−E15、E32−E34と、前記予測された軸を、運動の実質的に不変な回転軸と同定するステップとを含む。実質的に不変な軸周りで回転する移動体の運動を予測するために特に使用される。
(もっと読む)
位置検知システム
【課題】光学的に遮蔽された空間を移動する移動体の位置も電磁気を利用して容易に検知する。
【解決手段】互いに直交する励磁コイル13,14を有し、これらの励磁コイル13,14に位相が90°ずれた励磁信号が入力される回転磁界プローブ11と、回転磁界プローブ11と離間して位置され、励磁コイル13,14で発生した回転磁界によって起電力が発生する検出コイル20とを備える。回転磁気プローブ11は、検出コイル20に対して移動するトンネル掘削機2の先導体3に取り付けられ、検出コイル20は地表4に配置される。検出コイル20は、回転磁界によって起電力が発生し、これに応じた位置信号を出力する。
(もっと読む)
回転飛翔体の回転角計測制御方法及び回転飛翔体
【課題】本発明は、回転飛翔する飛翔体内又は外の磁気センサから地磁気を界磁として発生する電圧波形を用いて基準方位信号を得ることを目的とする。
【解決手段】本発明による回転飛翔体の回転角計測制御方法は、磁気センサ(M)を設けた飛翔体(1)を発射し、中心軸を回転中心として回転する飛翔体(1)内又は外の磁気センサ(M)から地磁気(B)を界磁として発生する電圧波形(V)から飛翔体(1)の空間における回転角度である基準方位信号を得る方法である。
(もっと読む)
回転角検出装置
【課題】 車両運転時以外には角度位置の追跡をしなくても、ステアリングの絶対回転角度を検出可能として、消費電力を低減する。
【解決手段】 ステアリングシャフト1に対して回転方向には一体で軸方向にはスライド可能のロータ10にスクリュー12を形成し、これをベースのナット部5に噛み合わせ、回転に応じて軸方向に移動可とする。ロータは厚さが徐々に増大する帯状の永久磁石を螺旋状に巻きつけた軸傾斜永久磁石20と駆動歯車14を備え、軸傾斜永久磁石の外周面にホール素子を対向させる。駆動歯車に噛み合う従動歯車31には永久磁石32を固定し、これに対向させてAMRセンサ33を配置する。ホール素子が対向する軸傾斜永久磁石は操舵の全角度範囲にわたって厚さが変化するので、その出力から現在の粗の絶対回転角度が得られる。これと高分解能のAMRセンサの出力とに基いて、高精度の絶対回転角度を得る。
(もっと読む)
姿勢並びに関節角度検出装置及び方法
【課題】 地磁気や外部磁界の影響を受けないで発信出力を受信することができる。
【解決手段】 基準部位に取付けられ交番電流により交番磁束を発生させる送信コイル3と、動作部位に取付けられ上記交番磁束を検知する受信コイル4と、上記交番電流を発生させる発振器1の発振波形と上記交番磁束を検知する受信コイル4の受信波形との同期検波を行う同期検波回路6とを有する。また、送信コイル3に対し異なる動作部位に複数の受信コイル4を備え、この複数の受信コイル4を切り替えるマルチプレクサ10を備える。
(もっと読む)
掘進管先端位置姿勢計測方法及び掘進管先端位置姿勢計測装置
【課題】地磁気が乱れていても、掘進管先端部の水平位置、深さ、傾斜角、回転角、及び方位角を精度よく測定する。
【解決手段】一辺が掘進計画線13と重なるように敷設された電流路22に交流電流を供給する電源21が接続されている。掘進管10先端部に3軸磁界検出器11及び3軸重力方向検出器12が設置されている。重力方向から掘進管先端部の傾斜角及び回転角を求める傾斜角・回転角検出部が設けられている。磁界の交流成分と電源からの同期信号から掘進管先端部の方位角を求める方位角検出部33が設けられている。磁界の交流成分から掘進管先端部の水平位置及び深さを求める水平位置・深さ計測部35が設けられている。
(もっと読む)
1 - 17 / 17
[ Back to top ]