
Fターム[2F063GA65]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | コード板、スケールの形状、構造 (182) | 直板形 (17)
Fターム[2F063GA65]に分類される特許
1 - 17 / 17
磁気センサ、磁気エンコーダ、磁気エンコーダモジュール、レンズ鏡筒

【課題】より高精度の磁界検出を可能とする磁気エンコーダを提供する。
【解決手段】この磁気エンコーダは、長手方向において所定のピッチで着磁された帯状の磁気メディアと、その磁気メディアの表面上を長手方向に沿って摺動しつつ、磁気メディアからの磁界を検出する磁気センサ1と、磁気センサ1を支持し、磁気センサ1を磁気メディアの表面に付勢するサスペンションとを備える。磁気メディアは、例えば円筒状の回転体の外面に、その長手方向が回転体の回転方向と一致するように取り付けられている。磁気センサ1は、基体21上に設けられた磁気抵抗効果素子22と、それを覆う第2および第3の絶縁層Z2,Z3とを有する。磁気メディアと対向する対向面1Sは、磁気メディアの長手方向に沿った断面において、磁気抵抗効果素子22の配置された中央領域WR1が最も突出した形状を有する。
(もっと読む)
ポジションセンサ

【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、第1の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる第1の着磁領域10Aを有する。また、磁石10は、第2の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が上記比例関係とは傾き正負逆の比例関係となる第2の着磁領域10Bを有する。各ホールIC21〜23による検出電圧は、シフトレバーが第1の直線上の操作ポジションにある場合と、シフトレバーが第2の直線上の操作ポジションにある場合とで、大小関係が逆になる。
(もっと読む)
位置検出装置
【課題】広い検出範囲でありながら、高い測定精度をもち安価で小型の位置検出装置を提供する。
【解決手段】磁石3の長さより短い配置間隔で磁気検知器5を複数個並べ、検出範囲を複数の磁気検知器5で分割して測定する。これにより任意の検出範囲の位置検出装置が製作でき、検出範囲が長い場合でも磁石3が小型にでき、さらに位置検出装置の全長を短くできる。また、磁石3の着磁方向を移動方向に異極とし、移動方向に垂直な方向の磁力線を検出対象とすることで、磁力線の強さが磁石の全長方向に広い範囲でなだらかに変化するので、検出精度の高い位置検出装置が実現できる。さらに検出範囲を複数の磁気検知器5で分割して測定するので、位置測定の分解能を高くでき、高精度の測定が可能となる。
(もっと読む)
移動体の位置読取装置
【課題】部品の寸法上の誤差や変形に関わらず移動体の位置を常に正確に読み取ることができる移動体の位置読取装置を提供する。
【解決手段】移動体の移動可能方向に延在形成され移動体の位置を記録する位置記録部110と、位置記録部を配置したフレーム120と、位置記録部と所定距離離間しかつ位置記録部に沿って延在するようにフレームに支持されたガイド軸130と、位置記録部に記録された移動体の位置を読み取る読取部140と、ガイド軸に沿って移動し、読取部が位置記録部と所定間隔隔てて対向配置するように読取部を備えたケース本体150と、ケース本体に備わった読取部とフレームに配置された位置記録部との間隔をケース本体がガイド軸の何れの位置にあっても一定となるようにケース本体を位置記録部に付勢する付勢部材160と、を備えた。
(もっと読む)
リニアセンサ
【課題】本発明は、検出コイルとテーパ状の複数のスケールの組合わせにより簡単な構成で高性能の直線検出を行うことを目的とする。
【解決手段】本発明によるリニアセンサは、長手状磁性部材(40)の上に貼り合わせた第1、第2、第3スケール(40A,40B,40C)と、前記各スケール(40A,40B,40C)に対応する第1〜第3突出歯部(32〜33)を有するE型の検出ステータ(30)と、を備え、前記第1、第3スケール(40Z,40C)の第1、第3スケール幅(B1,B3)は長手方向(A)に沿ってテーパ状に変化し、長手方向の位置を第1、第2検出コイル(2,2A)で検出する構成である。
(もっと読む)
リニア位置センサ
【課題】従来のリニア位置センサは、複雑な構造が必要となり、信頼性が低くなっている。
【解決手段】本発明によるリニア位置センサでは、スケール方向3に沿う第1位置26での第1スケール内ギャップ24の幅と第2スケール内ギャップ25の幅との組み合わせが、スケール方向3に沿う第2位置27での第1スケール内ギャップ24の幅と第2スケール内ギャップ25の幅との組み合わせと異なるように第1〜第3スケール部材21〜23が配置されており、演算部31が、第1検出コイル15からの信号15aと第2検出コイル16からの信号16aとに基づいて、スケール方向3に沿う検出ステータ1とスケール体2との相対的な位置を検出する構成である。
(もっと読む)
センサ装置
【課題】薄型化並びに部品点数の削減による低コスト化と組立作業性の向上を図る。
【解決手段】第1及び第2の絶縁基板3,4の表面に印刷形成された第1検出コイル30A,30B,40A,40Bのインピーダンスが直線軌道上を変位する検出体51A,51Bの位置に応じて変化することを利用して直線上を移動する対象物の移動量や位置などを検出することができる。しかも、検出コイルが巻回されたボビンに導電性筒体を進退自在に外挿する従来例と比較して、検出コイル30A,30B,40A,40B並びに検出体51A,51Bを薄く且つ小さくすることができる。その結果、薄型化並びに部品点数の削減による低コスト化と組立作業性の向上が図れる。
(もっと読む)
磁気エンコーダ装置
磁気エンコーダ装置用の磁気スケール(4;62)が説明される。磁気スケール(4;62)は複数の溝(16,18;42,44)を具えるスケール部材を具える。スケール部材は、対応する磁気スケールリーダユニット(6;76)によって読み取り可能な受動的磁気スケールトラックを画成している。複数の溝は、少なくとも第1溝種類の溝(16,42)および第2溝種類の溝(18,44)を具え、第1溝種類の溝(16,42)の位置における磁気スケールの磁気特性は第2溝種類の溝(18,44)の位置における磁気スケールの磁気特性と異なっている。スケール部材はデータビットのシーケンスを具える少なくとも1つのコードワードの形態の絶対位置情報を担持し、データビットの各々はスケール部材の溝によって提供され、データビットは、溝(16,42)が第1の溝種類のものである場合には第1の値(1)を、溝(18,44)が第2の溝種類のものである場合には第2の値を取る。複数の溝(16,18;42,44)の中点はスケール部材(4;62)の長さ方向に沿って実質的に等間隔である。従って、相対および絶対位置情報を磁気スケール(4;62)から抽出することができる。  (もっと読む)
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、安価な構成で、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】第一または第二の検出手段15または16のいずれかを磁石16Aと、直交配置された複数のホール素子16Bと16Cから形成すると共に、制御手段17がこの複数のホール素子16B、16CとAMR素子15Bからの検出信号を用いて、先ず回転体11の概略の回転角度を検出し、この後、AMR素子15Bからの検出信号を用いて、詳細な回転角度を検出することによって、安価なホール素子16Bや16Cを用いることができるため、安価な構成で、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
ストロークセンサ、アクチュエータ及び車両用ヘッドライト装置
【課題】移動体の移動位置を線形に検出でき、しかも、強度的に強い構成にできるとともに成形が容易で安価に製造できるストロークセンサ、アクチュエータ及び車両用ヘッドライト装置を提供する。
【解決手段】センサマグネットMGは、ホールIC52の検出面52aと相対向する対向面が、前後方向に同一曲率半径の円弧状の円弧面S1に形成されている。円弧面S1は、センサマグネットMGの長手方向の中間位置P0を垂直に通過する直線L上であって、ホールIC52と反対側の線上に、該円弧面S1の曲率半径rの中心点Oが存在する円弧面である。ホールIC52は、検出面52aに対して垂直方向の成分の磁束密度を検出し、検出面52aに対して平行の磁束は検出しない。
(もっと読む)
移動体システム
【構成】 複数のコイルからなるアレイを検出ヘッドに設け、アレイ長と等しいピッチで走行経路に磁気マークを設ける。磁気マークとコイルとの相互作用から、磁気マークを基準とする移動体の位置を求める。
【効果】 磁気マークを連続的に配置しなくても、移動体の位置を求めることができる。
(もっと読む)
エレベータケージの位置を確認するための装置を有するエレベータ設備
【課題】ガイドトラック(7)のガイドフランジ(21)に沿って移動可能なエレベータカー(2)の位置を確認するための装置を備えたエレベータ設備を提供する。
【解決手段】長手方向のコードマークモデル(10)は、エレベータカー(2)の全移動経路に沿って移動方向(8)で固定して設けられており、エレベータカー(2)と共に移動できるコード読み取りセンサシステム(12)によって非接触で検出される。コード読み取りセンサシステム(11)は、移動方向(8)で固定して配置されるとともに、ホルダ(14)を用いてエレベータカー(2)上に装着されており、これにより、コード読み取りセンサシステム(11)がエレベータカー(2)の移動方向(8)と垂直な方向に移動でき、長手方向のコードマークパターン(10)と垂直な第1の方向(x)で、ローラガイド(15)をガイドフランジ(21)のガイド面(25)上で転動させることができる。
(もっと読む)
着磁ヨーク、磁石着磁方法、磁石、位置検出装置、及び、振れ補正装置
【課題】NS境界部位の両側に磁束密度が直線的に増加する位置検出用の磁石を着磁するための着磁ヨークを提供する。
【解決手段】磁性体に対して一対のN極とS極とを着磁して位置検出用磁極45aを得るために、所定幅W0の磁気ギャップ部1cを挟んだ両側に磁性体に当接させる当接面1a2,1b2を有する一対の着磁片1a,1bを備えた着磁ヨーク1Aにおいて、一対の着磁片1a,1bは、それぞれの当接面1a2,1b2が磁気ギャップ部1cの一端よりも突出しており、磁気ギャップ部1cの一端と、それぞれの当接面1a2,1b2との間を接続するテーパ面1a1,1b1を有することを特徴とする着磁ヨーク1Aを提供する。
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 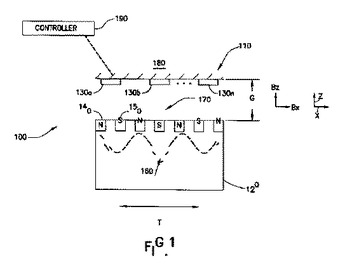 (もっと読む)
(もっと読む)
移動体システム
【構成】 移動体2の走行方向に平行に2列に磁気マーク21,22を配置し、2個のリニアセンサ16,17で各磁気マーク21,22を基準とする絶対位置を求める。各磁気マーク21,22の中心の原点基準の絶対位置を記憶し、検出する磁気マークを切り替えながら、移動体2の絶対位置を求める。
【効果】 離散的に配置した磁気マークで、移動体の絶対位置を連続的に検出できる。
(もっと読む)
位置検出装置及びレンズ駆動装置
【課題】移動体が基体に対して直線移動する場合にも小型化を図ることができる位置検出装置及びレンズ駆動装置を提供する。
【解決手段】本発明のレンズ駆動装置5に用いられる位置検出装置1において、移動体9に固定した2つの磁気スケール27a、27bは移動体9の移動方向に沿って異なる磁極SNを交互に着磁した着磁面を有しており、2つのMRセンサ29a、29bは対峙する磁気スケール27a、27bの磁気を検知して出力信号を発することにより基体4に対する移動体9の直線移動変位を検出しており、2つのMRセンサ29a、29bは移動体9の移動方向に沿って一方向に並べて配置してあり、移動体9が一方向に移動したときに一の磁気スケール27aが一のMRセンサ29aに対峙した後に、他の磁気スケール27bが他のMRセンサ29bに対峙する。
(もっと読む)
位置検出装置およびカメラ
【課題】 位置検出を精度良く行うことができる位置検出装置の提供。
【解決手段】 磁気抵抗素子が2対設けられた検出ヘッド2に対して、磁気スケール1が接触しながらは図示左右方向に移動すると、一方の磁気抵抗素子対からはA相出力が、他方の磁気抵抗素子対からはB相出力が出力される。各比較器5a,5bは、A相およびB相出力と基準電圧発生器7からの基準電圧値Vrとに基づいて矩形波Y1,Y2を出力する。矩形波処理回路8は各矩形波Y1,Y2に応じたパルス信号をマイクロコンピュータ9に出力し、マイクロコンピュータ9はそれらのパルス信号をカウントすることにより磁気シート1の移動距離を検出する。基準電圧発生器7は位相検出器6から出力される移動方向情報に基づいて、右方向移動時の基準電圧値または左方向移動時の基準電圧値を各比較器5a,5bに出力する。
(もっと読む)
1 - 17 / 17
[ Back to top ]