
Fターム[2F063GA67]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | コード板、スケールの形状、構造 (182) | 円盤形 (44)
Fターム[2F063GA67]に分類される特許
1 - 20 / 44
演算装置、相対移動量測定装置、および、演算方法
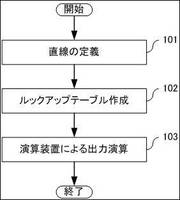
【課題】位相の異なる1対の入力信号から出力を得る演算においては、arctan等の複雑な演算が必要となり、演算回路の負荷が大きくなってしまう。また、演算回路の負荷を軽減するためにルックアップテーブルを参照して出力を得る場合、必要なメモリが大きくなってしまう。
【解決手段】位相の異なる1対の入力信号IN1、入力信号IN2に対して、関数Fを用いて、入力値XをX=F(IN1、IN2)と定義する。入力値Xと出力値Yの関係を慨ね線形となるように関数Fを定義することにより、複雑な演算を使用することなく入力信号から予想される出力値を得ることが可能となる。ルックアップテーブルを参照する場合は、出力値と予想される出力値との差分のみをテーブル化しておくことにより、メモリを削減可能となる。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置

【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
回転角度検出装置、、回転角度検出方法、部品実装装置
【課題】回転軸VAを中心とする回転動作の他に回転軸VA方向への移動も移動部材85が行なう構成において、移動部材85の回転角度θeを磁気センサにより高精度に検出することを可能とする。
【解決手段】磁石91とホールIC921、922との回転軸VA方向への距離hが所定の検出距離となる検出位置Pdに移動部材85がある状態でのホールIC921、922の出力信号Ss、Scに基づいて、アーム61bに対する移動部材85の回転角度θeを検出する。したがって、ホールIC921,922と磁石91との距離の変化による影響を排して、ホールIC921,922の出力信号Ss、Scから、アーム61bに対する移動部材95の回転角度θeを高精度に検出することが可能となる。
(もっと読む)
モータ
【課題】簡易な構成にてトルクリップルの低減を図ることが可能なモータを提供する。
【解決手段】マグネットを有する各磁極が周方向に等ピッチに設けられたロータに対して、センサマグネット17は、N極着磁部17cがなす角度θs1をS極着磁部17dがなす角度θs2よりも大きい角度に設定される。モータは、センサマグネット17の回転動作により生成される回転検出信号に基づいて、ロータの磁極の切り替わりタイミングに対してずれた回転磁界を発生させる。
(もっと読む)
位置検出装置及び位置検出方法
【課題】温度特性のバラツキを解消し、縦方向のガタツキによる誤差をなくすようにした位置検出装置及び位置検出方法を提供すること。
【解決手段】ホール素子(22a)のホール電圧Vhe1は、A・K・Bhe1(Aはプレアンプ(32)の増幅率、Kは定数、Bhe1はホール素子が受ける磁束密度)になったとすると、PIレギュレータ(41)はフィードバック制御によってA・K・Bhe1+Vref=AGND(=0)になるように、PI出力のバイアス点を自動的に変化させる。増幅後のホール素子(22b)のホール電圧Vhe2はA・K・Bhe2となる。K=−Vref/A・Bhe1であるから、ホール素子のホール電圧Vhe2は、−Vref・Bhe2/Bhe1となる。ホール電圧は、磁束密度と比例するので、ホール素子(22a)とホール素子(22b)の出力電圧を割り算していることと等価である。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて、第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて前記第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、第2位置情報の相対的な変位を検知した場合に、第2位置情報の変位に応じて補正テーブルを生成する補正テーブル生成部とを備える。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す第1の補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、予め生成されている複数の補正テーブルの中から、第2位置情報の相対的な変位に応じて第2の補正テーブルを選択し、選択した第2の補正テーブルに基づいて、第1の補正テーブルを変更する補正テーブル変更部とを備える。
(もっと読む)
回転検出装置
【課題】コイルやリード線の断線を防止することにある。
【解決手段】外周側にコイルが巻装される略円筒形状のボビン21と、ボビン21の軸心に嵌入される鉄心コア23と、鉄心コア23を磁化させるマグネットとを有するパルサ13であって、ボビン21の端部21aには一対のターミナル28a,28bがインサートモールドされている。一対のターミナル28a,28bは、導電材料によりボビン21の端部21aの断面形状に沿う略円弧状に形成されている。この一対のターミナル28a,28bには、コイルの両端に設けられた撚り線部33a,33bと、エンジン制御装置に一端が接続された一対のリード線の他端とがそれぞれ電気的に接続されている。
(もっと読む)
回転検出装置
【課題】回転検出装置の組立作業性を向上させることにある。
【解決手段】外周側にコイルが巻装される略円筒形状のボビン21と、ボビン21の軸心に嵌入される鉄心コア23と、鉄心コア23を磁化させるマグネットとを有するパルサ13であって、ボビン21の端部21aには一対のターミナル28a,28bがインサートモールドされている。一対のターミナル28a,28bは、コイル接続部30と、リード線接続部31と、コイル接続部30とリード線接続部31とを連結する連結部29とを備えている。コイル接続部30にはコイルの両端に設けられた撚り線部33a,33bが電気的に接続され、リード線接続部31にはリード線の一端が電気的に接続されており、これらコイル接続部30とリード線接続部31とが平面状に形成されている。
(もっと読む)
回転角検出装置およびその組み付け方法
【課題】吸気弁11の回転角の検出精度を向上する。
【解決手段】電子スロットル1を製造する工程において、信号処理回路22aは、磁気検出素子31の検出信号を補正するための補正値関数α、β、ゲイン補正値Gを算出するとともに、この算出された補正値関数α、β、ゲイン補正値Gをメモリに記憶する。信号処理回路22aは、電子制御装置40から指令を受けたときに、メモリに記憶された補正値関数α、β、ゲイン補正値Gを用いて磁気検出素子31の検出信号を補正して補正後の検出信号を算出して電子制御装置40に出力する。
(もっと読む)
回転角度検出装置
【課題】回転角度の検出に用いる構成を利用して、回転体の軸ずれを検知可能とした回転角度検出装置を提供する。
【解決手段】円盤状の回転体20の回転角度を検出する回転角度検出装置において、回転体20の円盤面には、複数の溝Dを設け、回転体20が回転したとき、溝Dの有無によって変化する磁界に応じて誘起され交流電圧を生成する検出コイル32A,32B,32C,32Dを円盤面に対向して設け、検出コイル32A,32B,32C,32Dに誘起される交流電圧に基づき回転体20の回転角度を求めるとともに、回転体20の軸ずれの有無を検出する回転角度検出装置。
(もっと読む)
エンジン制御装置
【課題】エンジン出力軸の回転位相のソフトウェアによる検出とハードウェアによる検出との切り替えを適切に行うことができるエンジン制御装置を提供する。
【解決手段】この装置は、欠歯部位を有する10°CA間隔のパルス信号(NE10信号)を入力してTDC信号を出力する信号処理回路を備える。NE10信号に基づくエンジン出力軸の回転位相の検出を、エンジン回転速度NEが高い運転領域では信号処理回路(ハードウェア)による検出を通じて行う一方、エンジン回転速度NEが低い運転領域ではマイクロコンピュータによる演算処理(ソフトウェア)による検出を通じて行う。ハードウェアによる検出からソフトウェアによる検出への切り替えを、エンジン回転速度NEが予め定められた所定速度Vを下回った後に(S202:YES)、エンジン出力軸の回転位相が予め定められた所定位相になるタイミング(S203:YES)で行う。
(もっと読む)
結合同調回路を使用して2つの物体の相対位置を検知する電磁方法
回転角検出装置およびこれを備えたパワーステアリング装置
【課題】シャフトが径方向にずれた場合に検出誤差を抑制することのできる回転角検出装置およびこれを備えたパワーステアリング装置を提供する。
【解決手段】インプットシャフト41に一体に設けられ、インプットシャフト41の周方向に所定の間隔をもってN極およびS極が着磁された磁性部材44と、磁性部材44に対向配置されてN極およびS極による磁界の変化を検出するMRセンサ45とを備えた回転角センサ50において、MRセンサ45をインプットシャフト41の周方向に異なる位置に複数配置する。
(もっと読む)
変速位置検出装置
【課題】 電源を供給する制御装置が故障した場合であっても、変速装置のニュートラルを表示することができる変速位置検出装置を提供する。
【解決手段】 車両の変速装置の変速位置を操作するシャフトに連動して回動する回転部材1と、回転部材1とともに回動する磁石2と、磁石2が回転することによって磁石2の磁界の強さを検出する磁気検出部3と、この磁気検出部3からの検出信号を受ける制御装置8と、を備えた変速位置検出装置Aにおいて、磁気検出部3は、前記変速装置の変速位置を前記シャフトの位置から検出する第1の磁気検出部31Aと前記変速装置のニュートラルを前記シャフトの位置から検出する第2の磁気検出部31Bとを備え、第2の磁気検出部31Bは、制御装置8以外の他の装置から駆動電源が供給されるものである。
(もっと読む)
故障診断装置、回転角度検出装置および故障診断方法
【課題】故障検出を、故障検出専用の回路などを別に設けることなく行うことができる技術を提供する。
【解決手段】第2の歯車の回転角度を検出する第1の回転角度センサと、第3の歯車の回転角度を検出する第2の回転角度センサと、第1の回転角度センサが検出した第2の歯車の回転角度と第2の回転角度センサが検出した第3の歯車の回転角度との角度差に基づいて第2の回転軸の回転角度を演算する演算手段とを備える回転角度を検出する検出装置の故障を診断する故障診断装置であって、第1の回転角度センサが検出した第2の歯車の回転角度と第2の回転角度センサが検出した第3の歯車の回転角度とに基づいて、第2の歯車の回転角度と第3の歯車の回転角度との角度差が零となる交差角θKを算出し(S906)、交差角θKに基づいて故障を診断する(S907〜S910)。
(もっと読む)
エンコーダおよび信号処理方法
【課題】磁気検出素子の出力にバラツキがある場合でも、検出精度を向上させ、高精度を有するエンコーダを提供する。
【解決手段】エンコーダが、第1の絶対位置エンコーダから入力された第1の検出信号に基づいて入力軸の角度位置を示す第1の位置データを検出する第1の位置データ検出回路と、第2の絶対位置エンコーダから入力された第2の検出信号に基づいて出力軸の角度位置を示す第2の位置データを検出する第2の位置データ検出回路と、第1の位置データと第2の位置データとを合成して、入力軸の多回転量とともに1回転内の角度位置を示す合成位置データを生成する位置データ合成回路と、を備え、前記第1の絶対位置エンコーダまたは前記第2の絶対位置エンコーダは、前記入力軸又は前記出力軸の回転にともない回転する回転子と前記回転子の周囲に配置される複数の磁気検出素子とを有する磁気式エンコーダである。
(もっと読む)
インダクタンス式回転角度検出装置及びそれを備えたモータ駆動式の絞り弁制御装置
【課題】スロットルシャフトの端部にインダクタンス式の非接触式回転角度検出装置をコンパクトに形成した信頼性の高いモータ駆動式の絞り弁制御装置を得る。
【解決手段】本発明は絞り弁が取付けられた回転軸の先端部に励起導体を取付け、この励起導体に対面するように励磁導体および信号検出導体をギアカバーに一体成形し、励磁導体および信号検出導体を遮蔽材で覆う。励磁導体と信号発生導体を回転体側の励起導体が配置された空間から遮蔽でき、回転体側の環境に影響されることのない信頼性の高いインダクタンス式の非接触式回転角度検出装置を備えたモータ駆動式の絞り弁制御装置が得られる。
(もっと読む)
回転角センサ
【課題】使用する永久磁石の構造の単純化や小型化によって、コスト軽減と、軽量化を図ることのできる回転角センサを提供すること。
【解決手段】回転軸23上のヨークの一対の円板部25a,25bに永久磁石27を装備して、一対の円板部25a,25bの外周部に沿って周方向に徐々に強さが変化する磁界を形成し、一対の円板部25a,25bの外周囲のセンサ設置位置に設けたホール素子の出力信号によって回転軸23の回転角を検出する回転角センサにおいて、回転した際にホール素子との間の離間距離が周方向に徐々に変化する傾斜姿勢に一対の円板部25a,25bを固定したことで、永久磁石27を板厚が一定の円板状に形成して、使用する永久磁石27の小型化や構造の単純化を実現することができる。
(もっと読む)
回転角度検出装置及びステアリング装置
【課題】耐久性を高めることができ、かつより静寂にすることができる技術を提供する。
【解決手段】回転軸110に設けられる第1の磁石10と、第1の磁石10と所定のクリアランスを介して配置され、第1の磁石10との間に生じる磁力により第1の磁石10の回転に連動して回転する第2の磁石20と、第2の磁石20の回転角度を検出し、その検出結果に基づいて回転軸110の回転角度を検出する回転角度検出手段と、を備える。回転角度検出手段は、例えば、第2の磁石20を支持し回転可能に支持される磁石支持部材40の回転中心軸方向の一方の端部に支持された第3の磁石30と、第3の磁石30から発生される磁界に基づいて第3の磁石30の回転角度を検知する磁気検出素子50とを有し、磁気検出素子50の検知結果に基づいて第2の磁石20の回転角度を検出する。
(もっと読む)
1 - 20 / 44
[ Back to top ]