
Fターム[2F063KA04]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器から得られる信号の形式 (479) | 相対的、インクリメンタル信号 (51)
Fターム[2F063KA04]に分類される特許
1 - 20 / 51
ドア開閉制御装置
ブラシレスDCモータの回転子位置検出方法とその装置
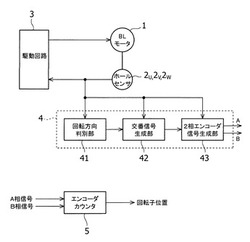
【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
位置検出装置、位置検出方法及び撮像装置

【課題】 小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行う。
【解決手段】 所定の方向へ動作され連続的に増加又は減少する信号を出力して光軸方向へ移動される可動レンズの絶対位置を検出する第1の検出センサーと、所定の方向へ動作され周期的かつ連続的に変化する信号を出力して前記可動レンズの相対位置を検出する第2の検出センサーとを設け、前記第1の検出センサーと前記第2の検出センサーを異なら動作速度で動作するようにした。
これにより、第2の検出センサーの着磁ピッチを大きくしたり、第1の検出センサーとしてリニアリティー誤差やヒステリシスの小さいものを用いる必要がなく、小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行うことができる。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
回転角検出装置およびそれを用いたアクチュエータ
【課題】 部品点数が少ない回転角検出装置を提供する。
【解決手段】 ECU71は、ホールIC751により検出されたパルス信号PS1と、パルス信号PS1のエッジ間のオン時間T1、オフ時間T2およびオン時間T3から生成した仮想パルス信号PS2とに基づいて各パルス信号PS1およびPS2のエッジE1〜E7をカウントすることにより、ロータ20の回転角を3.75度ごとに検出する。この構成では、1つのホールIC751に対し、ロータ20の回転に同期した2つのパルス信号PS1および仮想パルス信号PS2を用いて回転角を検出することができる。そのため、従来2つあったホールICの数を1つに減らしたとき従来と同等以上の分解能を得ることができる。つまり、分解能を維持しつつホールICの数を減らすことが可能である。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、検出する回転角度の誤差が少なく確実な角度検出が可能なものを提供することを目的とする。
【解決手段】磁石15A、15Bや磁石16A、16Bを第一及び第二の検出体12、13の回転中心C1、C2から所定間隔離れて対面配置すると共に、第一及び第二の検出体12、13の回転中心C1、C2上に磁気検出素子7、8を対向配置することによって、磁石15A、15Bや磁石16A、16Bの間に発生する直線状の磁力線の範囲が拡がるため、磁気検出素子7、8の位置ズレが多少生じても、検出信号の誤差が小さく、検出される回転角度の誤差を少なくすることができる。
(もっと読む)
多層構造において層を評価するための装置および方法
【課題】多層構造において層間ギャップを含む層を評価するための装置を提供する。
【解決手段】軸を横切って略整列した複数の縁部を呈する多層構造において、層間ギャップを含む層を評価するための装置10は、少なくとも1つのパラメータを検知するように構成された検知ユニット12、検知ユニットと結合されて、検知ユニットを軸に略沿って移動させるように構成された位置決めユニット14、ならびに位置決めユニット14および検知ユニット12の少なくとも1つと結合された制御ユニット16を含む。制御ユニット16は、検知ユニット12に電気信号を供給する。制御ユニットは16、検知ユニットが複数の縁部を過ぎて移動するとき、少なくとも1つのパラメータの変化を監視する。制御ユニット16は、少なくとも1つのパラメータの変化を使用して評価を行う。
(もっと読む)
移動体の位置読取装置
【課題】部品の寸法上の誤差や変形に関わらず移動体の位置を常に正確に読み取ることができる移動体の位置読取装置を提供する。
【解決手段】移動体の移動可能方向に延在形成され移動体の位置を記録する位置記録部110と、位置記録部を配置したフレーム120と、位置記録部と所定距離離間しかつ位置記録部に沿って延在するようにフレームに支持されたガイド軸130と、位置記録部に記録された移動体の位置を読み取る読取部140と、ガイド軸に沿って移動し、読取部が位置記録部と所定間隔隔てて対向配置するように読取部を備えたケース本体150と、ケース本体に備わった読取部とフレームに配置された位置記録部との間隔をケース本体がガイド軸の何れの位置にあっても一定となるようにケース本体を位置記録部に付勢する付勢部材160と、を備えた。
(もっと読む)
エンジン制御装置
【課題】エンジン出力軸の回転位相のソフトウェアによる検出とハードウェアによる検出との切り替えを適切に行うことができるエンジン制御装置を提供する。
【解決手段】この装置は、欠歯部位を有する10°CA間隔のパルス信号(NE10信号)を入力してTDC信号を出力する信号処理回路を備える。NE10信号に基づくエンジン出力軸の回転位相の検出を、エンジン回転速度NEが高い運転領域では信号処理回路(ハードウェア)による検出を通じて行う一方、エンジン回転速度NEが低い運転領域ではマイクロコンピュータによる演算処理(ソフトウェア)による検出を通じて行う。ハードウェアによる検出からソフトウェアによる検出への切り替えを、エンジン回転速度NEが予め定められた所定速度Vを下回った後に(S202:YES)、エンジン出力軸の回転位相が予め定められた所定位相になるタイミング(S203:YES)で行う。
(もっと読む)
多段モータを駆動源とする基板搬送ロボット
【課題】多段同芯モータを駆動源に有する基板搬送ロボットにおいて、モータの検出部が小型であって、アームの高い制御性能を確保でき、また検出部の交換が容易な基板搬送ロボットを提供する。
【解決手段】ロボットアームを駆動する第1回転モータ13と第2回転モータ14を軸方向に多段に配置した駆動部を有する基板搬送用ロボットにおいて、第1回転モータ13の回転位置検出部が、第1インクリメンタルエンコーダヘッド21と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ25a,bとから成り、第2回転モータ14の回転位置検出部が、第2インクリメンタルエンコーダヘッド22と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ26a,bとから成るよう構成した。
(もっと読む)
回転角度検出装置及びステアリング装置
【課題】耐久性を高めることができ、かつより静寂にすることができる技術を提供する。
【解決手段】回転軸110に設けられる第1の磁石10と、第1の磁石10と所定のクリアランスを介して配置され、第1の磁石10との間に生じる磁力により第1の磁石10の回転に連動して回転する第2の磁石20と、第2の磁石20の回転角度を検出し、その検出結果に基づいて回転軸110の回転角度を検出する回転角度検出手段と、を備える。回転角度検出手段は、例えば、第2の磁石20を支持し回転可能に支持される磁石支持部材40の回転中心軸方向の一方の端部に支持された第3の磁石30と、第3の磁石30から発生される磁界に基づいて第3の磁石30の回転角度を検知する磁気検出素子50とを有し、磁気検出素子50の検知結果に基づいて第2の磁石20の回転角度を検出する。
(もっと読む)
エンコーダスケール部材および取付方法
座標位置決め装置が開示される。座標位置決め装置は、取付面と、取付面に取付可能な移動案内部材と、目盛を感知するためのセンサを含む第一の部材であって、移動案内部材に取り付け可能な第一の部材と、使用時にセンサによって感知可能な第一の目盛セットを含むエンコーダスケール部材と、を備える。エンコーダスケール部材が取付面によって少なくとも第一の目盛セットの付近に支持されるよう、エンコーダスケール部材の少なくとも一部は取付面と移動案内部材の間に保持される。移動案内部材は、たとえば、ガイドレールまたは軸受であってもよい。このような座標位置決め装置で使用するエンコーダスケール部材もまた開示される。  (もっと読む)
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、安価な構成で、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】第一または第二の検出手段15または16のいずれかを磁石16Aと、直交配置された複数のホール素子16Bと16Cから形成すると共に、制御手段17がこの複数のホール素子16B、16CとAMR素子15Bからの検出信号を用いて、先ず回転体11の概略の回転角度を検出し、この後、AMR素子15Bからの検出信号を用いて、詳細な回転角度を検出することによって、安価なホール素子16Bや16Cを用いることができるため、安価な構成で、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
速度検出装置および位置検出装置および位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】X軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを有するとともに、
スライダ1のX軸方向の位置に応じた信号を出力するレゾルバ30と、スライダ1のX軸方向の加速度を検出する加速度センサ31とを備えた位置検出装置300を備え、
位置検出装置300がレゾルバ30と加速度センサ31の出力に基づいてスライダ1の位置を求めることを特徴とする位置決め装置。
(もっと読む)
アンテナ装置とそれを用いた電子機器
【課題】
本発明は、例えば自動車(電子機器)などに装着され使用されるアンテナ装置とそれを用いた電子機器に関するものであり、小型化を図るとともに位置検出精度を高めることを目的とする物である。
【解決手段】
そしてこの目的を達成するために本発明は、前面側において、所定間隔をおいて設置された第1、第2の送受信開口11a,11bを有するアンテナ体7と、このアンテナ体7の後方において、導波路体8を介して設けた送受信体9を備え、前記導波路体8は、前記アンテナ体7の第1、第2の送受信開口11a,11bに対する導波路長を可変する構成とした。また、前記可動導波路10の固定導波路12、36と対向する面に、固定導波路12、36に向けて突出するほぼλ/4の複数の突起44を設け、この突起44を一構成要件とする位置検出手段を設けた。
(もっと読む)
位置検出装置、レンズ鏡筒及びカメラ
【課題】回転角や移動量を電圧に変換することにより相対距離を測定可能な位置検出装置を提供する。
【解決手段】本発明の位置検出装置は、第1部材(2,102)に対して移動する第2部材(3,103)と、前記第1部材と前記第2部材のうちの一方に、前記第2部材の移動方向に沿って配置された複数の電極(6a,6b)と、前記複数の電極上を、前記複数の電極の配置方向に沿って延在する第1抵抗体(8)と、隣接する前記電極に対して互いに異なる電圧を印加する印加手段(4a)と、前記第1部材と前記第2部材のうちの他方に設けられ、前記第2部材の移動に伴って前記第1抵抗体に接触して移動する第1接触部材(9)と、前記第1接触部材に印加される電圧に基づいて、前記第1部材に対する前記第2部材の位置を検出する検出手段(4b)と、備えることを特徴とする。
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 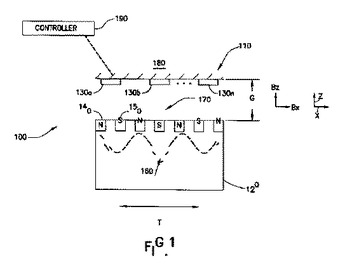 (もっと読む)
(もっと読む)
パルサープレートの取り付け構造
【課題】パルサープレートの振動時,パルサープレートのボスの周縁部の,該プレート周方向に直面する側に生じる集中応力を広く分散して,ボス周りの耐久性向上を図る。
【解決手段】内燃機関用クランク軸Cの,クランクアーム3及びカウンタウエイト4よりなる回転壁部9の端面10に,その周方向に並ぶ複数の凹部12を形成する一方,端面10に重ねられるパルサープレートPに,複数の凹部12に収容される複数の有底筒状のボス15を形成し,これらボス15をパルサープレートPに固着部材18により固着してなる,パルサープレートの取り付け構造において,ボス15の筒状部15aを,短径D1をパルサープレートPの周方向Aに向け,長径D2をパルサープレートPの半径方向Bに向ける異形円筒状に形成した。
(もっと読む)
位置検出装置
【課題】位置検出を高精度に行うことができる位置検出装置を提供する。
【解決手段】ギヤの歯の移動により変化する磁界によって抵抗値が変化する磁気抵抗素子が備えられ、磁気抵抗素子の抵抗値の変化に基づいてギヤの回転角度位置が検出される。基板30上に、同一の層において磁性薄膜にて構成される磁気抵抗素子ブリッジが複数並設され、かつ、縦方向にシリコン酸化膜33,35,37,39を介在させた状態で磁気抵抗素子ブリッジの一部が重なるようにして3層以上に磁気抵抗素子ブリッジが積層されている。
(もっと読む)
スライド操作装置
【課題】ミキサのフェーダ装置などのスライド操作装置において、操作ノブへの強い力による異常なカウントを防止する。
【解決手段】移動ブロック5を、互いに平行な移動ガイド体3と副移動ガイド体4で摺動自在に保持する。移動ガイド体3を非磁性ステンレスの軸部31と永久磁石材をスケール磁化して磁極(マーキング)を形成したスケール部32とで構成する。移動ブロック5に磁気式センサ7をスケール部32に対して対向配置する。磁気式センサ7でスケール部32の磁極を感知する。操作ノブ6のレバー6aに対して止め金具11A,11Bをストッパ部とする。スケール部32において、ストッパ部間の磁気式センサ7の移動範囲の外側の部分は磁極を形成しない不感帯3A,3Bとする。
(もっと読む)
1 - 20 / 51
[ Back to top ]