
Fターム[2F063LA06]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | フィルター、検出信号取り出し回路 (99)
Fターム[2F063LA06]に分類される特許
61 - 80 / 99
回転角検出装置、及び電動パワーステアリング装置

【課題】サンプルホールド回路を廃止し、モータ制御とA/D変換が重ならないようにsin/cos波形を取得してモータの回転角θを検索する回転角検出装置を提供する。
【解決手段】 レゾルバ41に正弦波励磁電圧を入力するとEsin電圧及びEcos電圧が出力される。Esin電圧及びEcos電圧は、A/D変換器59へ直接入力される。A/D変換器59は、第2のタイマ68のタイミングでEsin電圧及びEcos電圧をA/D変換してsin波形とcos波形を取得する。さらに、除算器60がsin波形とcos波形からtanθを算出し、tanθ→θ変換MAP61がtanθよりモータ7の回転角θを求め、その回転角θに基づいてベクトル制御部64がモータ7のベクトル制御を行う。このとき、モータ制御中においては、ベクトル制御装置69からA/D変換器59へA/D変換禁止信号が送信されるので、回転角θは更新されない。
(もっと読む)
位置検出システムおよび位置検出方法

【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとがともに存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により、所定の周波数だけ離れた一組の第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、一組の第1の位置算出用周波数に挟まれた略中心の周波数を共振周波数とする磁気誘導コイル5を搭載した第2のマーカ3と、その作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から一組の第1の位置算出用周波数を有する一組の第1の検出磁界成分の強度の加算値を抽出する抽出部30と、抽出された加算値に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
位置検出装置および医療装置誘導システム
【課題】磁界検出部を検知体に近接して配置でき、装置の小型化、低コスト化を図りつつ、検知体の位置を精度よく検出する。
【解決手段】少なくとも1つの内蔵コイル3aを含む回路を備える検知体3が配置される検出空間Sに対し、少なくとも1つの磁界発生コイルを備え第1の磁界を発生させる第1の磁界発生部2と、発生された第1の磁界により内蔵コイル3aから発生される誘導磁界を検出するよう配列された複数の検出コイル4aを備える磁界検出部4と、第1の磁界発生部2により発生され検出コイル4aに入射する第1の磁界に対して略逆位相の磁界成分を有する少なくとも1つの磁界発生コイルを備え第2の磁界を発生させる第2の磁界発生部6とを備え、第1の磁界発生部2と検出コイル4aとが、第1の磁界の発生方向と、誘導磁界の検出方向とを交差させるように配置されている位置検出装置1を提供する。
(もっと読む)
高分子アクチュエータの伸縮量センシング方法および伸縮量センシング装置
【課題】 高分子アクチュエータの伸縮量センシング精度を向上させ、かつコンパクトである、高分子アクチュエータの伸縮量センシング方法および装置を提供する。
【解決手段】 高分子アクチュエー1の駆動を周波数変調した駆動電圧8により行い、駆動電圧8と駆動波形10との位相15を比較することにより、高分子アクチュエータ1の伸縮に伴う静電容量の変化を計測することで、高分子アクチュエータの伸縮量17を求める方法である。
(もっと読む)
被駆動体の位置検出装置
【課題】被駆動体の位置を検出するための専用のデバイスを追加することなく、被駆動体の位置を検出することができる被駆動体の位置検出装置を提供する。
【解決手段】被駆動体8と、コイル11b,12bが巻かれた電磁石11,12と、被駆動体に一体に設けられ、電磁石と対向するアーマチュア13と、コイル11b,12bに駆動電流IACを供給することにより、アーマチュア13を作動させ、被駆動体を駆動する駆動回路16と、を有する駆動装置において、被駆動体の位置を検出する被駆動体の位置検出装置であって、コイル11bの電圧を検出する電圧検出手段21と、駆動電流IACを検出する駆動電流検出手段22と、検出された検出電圧SVおよび検出電流SIに基づいて、被駆動体の位置を検出する位置検出手段30,40,50と、を備える。
(もっと読む)
高精度位置測定のための改良された直線型可変差動トランス
【課題】雑音を減少させ、感度を増大し、そして直線型可変差動トランス(LVDT)の時間応答を改良する変換器を提供する。
【解決手段】本装置は、従来型LVDTの一次コイルおよび高透磁率強磁性コアを、非強磁性可動コア14の周囲に巻いた一次巻線15で置き換える。バルクハウゼン雑音を軽減または除去することに加えて、このアプローチは、コアの過度の渦電流加熱、高透磁率材料と関連する非線形性、および磁束回路の長さスケールを含む、従来型LVDTの他の好ましくない効果を軽減または除去した。これらの改良は、改良型LVDTの信号調整回路に連結される。本装置はアクチュエータでもあり、それを用いて差動電圧を力に変換することができる。これらの改良点を伴う装置は、分子力測定、原子間力顕微鏡、および操作技術、リソグラフィ製造、ナノメータースケールの表面形状測定、およびナノテクノロジーの他の局面を含め、多くの用途を有する。
(もっと読む)
変形検出センサ
【課題】圧電センサによる変形検出の検出精度および信頼性を向上させる。
【解決手段】基準信号発生部12はセンサ本体11に基準信号βを入力し、LPF31はセンサ本体11の出力信号(つまり合成信号γ)から、変形に起因するひずみ速度検知信号αを抽出し、BPF32は基準信号βを抽出する。電圧評価部41は圧電フィルムの変形に係る情報を検知し、静電容量評価部42は圧電フィルムの温度状態に係る情報を検知する。変形量信号補正部43はひずみ速度検知信号αに基づく圧電フィルムの変形に係る情報を、基準信号βに基づく圧電フィルムの温度状態に応じて補正する。
(もっと読む)
周波数外挿を利用した歪みのない位置追跡方法およびシステム
【課題】少なくとも一つの磁界発生器を使って、物体の近傍に二つあるいはそれ以上の周波数で交流(AC)磁界を発生することを含む、物体の位置追跡の方法を提供する。
【解決手段】AC磁界を物体と関連付けたフィールドセンサーを使って検出する。検出されたAC磁界の少なくとも一部分が歪みを受けている、フィールドセンサーでのAC磁界の振幅および方向を示す対応ACデータポイントを生成する。AC磁界の振幅および方向をひずみの低減したレベルの状態で求めるために、ACデータポイントのAC磁界の複数の周波数への依存を単一の標的周波数への依存に外挿する。少なくともひとつの磁界発生器に対する物体の位置座標を、外挿されたデータポイントに応じて計算する。
(もっと読む)
移動体の位置検出方法及び装置
【課題】移動体が既に検査を終了した領域と、未検査領域との区別が明確に行え安全かつ高精度に移動体の位置を検知できるようにする。
【解決手段】移動体Aに設けた磁気を発信する送信コイル5と、送信コイル5が発信する磁気を受信する複数の受信コイル61,62を同一平面状において離隔配置した基準具6と、受信コイル61,62で受信した磁気情報に基づいて当該各受信コイル61,62から前発信コイル5までの距離を演算し、得られた各距離情報に基づいて発信コイル5の座標位置を決定し、出力する演算手段を有する。
(もっと読む)
硬貨認識装置
【課題】硬貨の側面に対応する位置に配設された反射型磁気センサの出力に基づいて硬貨の外径を検出することによって、異物の影響を受けず、硬貨を搬送する搬送ベルトの実装の妨げにならず、硬貨の金種の判定精度が高いようにする。
【解決手段】搬送ベルトによって搬送される硬貨11の外径を検出する硬貨認識装置10であって、搬送される硬貨11の側面に対応する位置に配設された反射型磁気センサ12と、該反射型磁気センサ12の出力に基づいて前記硬貨11の外径を検出する検出回路20とを有し、検出された外径に基づいて硬貨11の金種を判別する。
(もっと読む)
形状検出装置
【課題】測定物の測定対象面の形状を高感度で検出できる形状検出装置を提供する。
【解決手段】形状検出装置1は、人間の指紋の形状を検出するものあり、指が置かれる位置に設けられた電極アレイ11と、人が立つ位置に設けられた電極12と、この電極12に接続された交流の信号発生器13と、電極アレイ11に接続された検出器アレイ14とを備える。
(もっと読む)
研磨方法
【課題】半導体基板上に形成されるごく薄い導電性膜から比較的厚い導電性膜まで正確に膜厚等の検出を行いながら該導電性膜を研磨する研磨方法を提供する。
【解決手段】基準ウエハのインピーダンスを渦電流センサ10で計測することで、渦電流センサ10のインピーダンスと、センサコイルに供給すべき交流電流の周波数と、膜厚との関係を較正し、渦電流センサ10は、センサコイルに一定周波数の交流電流を供給して研磨対象物上の導電性膜に渦電流を形成し、センサコイルの両端子から見た導電性膜を含めたインピーダンスを計測し、研磨対象物上の導電性膜を含めたインピーダンスの変化から、導電性膜の膜厚変化を検出する。
(もっと読む)
位置検出装置及び画像形成装置
【課題】載置部に載置された画像の原稿若しくは印刷用紙となるシートの検出を行う際に、簡単な構成で精度が高く、経年変化等の恐れのない検出を行う。
【解決手段】位置規制手段1L、1Rに直結されたラック2Lに電磁誘導方式の位置指示器10が固定される。位置指示器10に近接する位置には、電磁誘導方式の送受信手段となる複数のループコイルからなるループコイル群21を含むセンサ回路基板20が設けられる。さらにループコイルの各端部が選択回路22に接続され、これらのループコイルが順次選択されることにより走査されて駆動されるように構成される。そして送信時には、信号発生回路31で発生される特定周波数の信号が選択回路22で選択されているループコイル群21内のループコイルに特定周波数の信号が供給され、受信時には選択回路22で選択されたループコイルで受信された信号がアンプ33を介して取り出される。
(もっと読む)
磁気共鳴力顕微鏡
【課題】MRI像の理解を一層深めることのできる磁気共鳴力顕微鏡を提供する。
【解決手段】高周波磁場発生装置31が試料21の全体に均一に発生した高周波磁場中で、カンチレバー自己励振ループ部が前記カンチレバー23を自己励振した状態で、試料21(検体)のスピンを制御して磁気共鳴力を発生させ、周波数復調器26が磁気共鳴力に基づいた前記カンチレバー変位計測器29の検出信号から前記カンチレバーの共振周波数を計測し、かつカンチレバーの共振周波数シフトを計測し、カンチレバーの共振周波数のシフト量の直流成分Δνが一定となるようにスキャナー22を制御して試料21表面から探針24先端までの距離Zを調整して、試料21の原子間力像(AFM)をスキャナー駆動電源25が生成し、周波数復調器26での前記カンチレバーの共振周波数シフト量の交流成分δνに応じて磁気共鳴力像(MRFM)を位相検波器34が生成する。
(もっと読む)
閉鎖カバーのための方法及び制御システム
本発明は自動的に作動し、特に電力駆動でカバー、例えば自動車のトランク蓋を閉鎖する方法及び監視システムに関する。本発明はまた、対象物自体の存在を検出する方法及び検出システムにも関する。本発明の目的は、信頼性のある安全システムを実施する解決策を提供することである。本発明によれば、これは変調装置上の第1及び第2の出力の間に印加される交流電圧を生成する変調ユニットと、大規模な励起場を生成するためにそれらの出力のうちの一方に結合される電界生成構造と、電極構造に沿って延在する検出領域において電界効果を検出する検出電極構造を含む検出装置とを備える検出システムによって達成され、電界生成構造、検出電極構造は互いに近接して配置され、互いから遮蔽されることによって、励起場と検出領域とが検出される対象物によって橋絡されると、対象物の存在を示すものとして分類することができる電圧事象が検出電極構造内に誘起される。 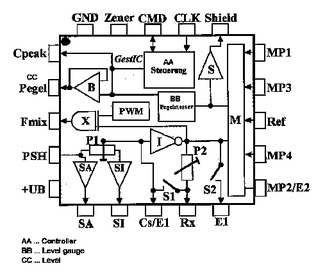 (もっと読む)
(もっと読む)
マルチターン用非接触式角度位置センサ
【課題】より優れた分解能と直線性精度のマルチターン用回転位置センサの提供。
【解決手段】この角度位置センサは、主歯車と、第1および第2の歯車と、第1および第2の角度位置センサアセンブリとを含む。主歯車は、シャフトに搭載することが可能であり、および、この外周に形成される複数の歯を有する。第1および第2の歯車は、主歯車の歯と係合する第1および第2の歯をそれぞれに有する。第1および第2の角度位置センサアセンブリは、それぞれに第1および第2の歯車と共に回転するように連結される第1および第2のカプラディスクをそれぞれに含む。第1および第2の角度位置センサアセンブリは、第1および第2のカプラディスクの360度の一回転に対応する第1および第2の出力信号をそれぞれに生成する。PWM生成器が第1および第2の出力信号に従ってPWM出力を生成する。
(もっと読む)
信号処理装置
【課題】センサ電極の静電容量の変化を検出する静電容量検出装置を組込んシステムに、外乱を遮断しつつ、センサ電極に長く触れた場合を検出させる。
【解決手段】人が触れるとセンサ電極11の静電容量が変化する。センサ電極11に接続された静電容量検出部12は、センサ電極11の静電容量に相当する出力信号12を出力する。ハイパスフィルタ21は、出力信号S12における周囲温度等の外乱要因を遮断する。第1検出部22は、人がセンサ電極11に触れたタイミングを検出し、第2検出部23はセンサ電極11から人が離れたことを検出する。計測部24は、第1検出部22及び第2検出部23で検出したタイミングの時間差を計測し、出力部25が時間差の判定を行う。
(もっと読む)
活性化デバイス
活性化プロセスが、指紋の山および谷の通過を検出し、対応する電気信号を生成する。電気信号はフィルタリングされて、フィルタリング電気信号を生成し、フィルタリング電気信号の平均レベルが閾値を超える場合に、活性化信号が生成される。  (もっと読む)
(もっと読む)
変位方向検出装置
【課題】粘弾性部材を用いて、移動部材20が固定部材11、12に対して少なくとも直交2軸方向へ相対変位する場合に、移動部材20の相対変位方向を検出することができる変位方向検出装置を提供する。
【解決手段】上側固定部材11と移動部材20との間に第1粘弾性部材31を配置し、下側固定部材12と移動部材20との間に第2粘弾性部材32を配置する。そして、第1粘弾性部材31のインピーダンスZ1と第2粘弾性部材32のインピーダンスZ2との差に基づき、移動部材20が上下方向へ変位したのか、それとも、左右方向へ変位したのかを判断する。
(もっと読む)
位置検出装置、位置入力装置、及び、コンピュータ
【課題】 表示画面を一体に備えた位置検出装置において、表示画面の表示面側に検出部を配置できるようにする。
【解決手段】 所定方向に並ぶ複数の画素の状態を変化させて画面を表示する表示パネルを一体に備えた位置検出部11において、表示パネルの表示面側にループコイル31A、32Aが配設され、このループコイル31A、32Aは、表示要素と重なる部分が表示要素の配列方向と平行でない向きに延びる直線または曲線により構成されている。
(もっと読む)
61 - 80 / 99
[ Back to top ]