
Fターム[2F063LA19]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | A−D変換 (148)
Fターム[2F063LA19]に分類される特許
121 - 140 / 148
位置検出装置、位置入力装置、及び、コンピュータ

【課題】 表示画面を一体に備えた位置検出装置において、表示画面の表示面側に検出部を配置できるようにする。
【解決手段】 所定方向に並ぶ複数の画素の状態を変化させて画面を表示する表示パネルを一体に備えた位置検出部11において、表示パネルの表示面側にループコイル31A、32Aが配設され、このループコイル31A、32Aは、表示要素と重なる部分が表示要素の配列方向と平行でない向きに延びる直線または曲線により構成されている。
(もっと読む)
位相検出回路及びこれを用いたレゾルバ/デジタル変換器並びに制御システム

【課題】小型かつ低コストで、耐ノイズ性を向上させた位相検出回路を提供する。
【解決手段】本発明の位相検出回路は、入力信号と参照信号546とを乗算して第1信号を出力する乗算器510と、第1信号を積分して第2信号を出力する積分回路520と、第2信号に基づいて位相情報を推定する位相推定回路530と、位相情報に基づいて参照信号546を生成する参照信号生成回路540とを備える。波形全体の情報に基づいて位相を求めるため、局所的なノイズの影響を希釈し、耐ノイズ性を向上させることができる。
(もっと読む)
回転センサおよびそれを用いた車両用移動体システム
【課題】 位置検出にレゾルバを用いた高分解能な回転センサを提供する。
【解決手段】 1相の正弦波電圧入力により正弦波および余弦波電圧を出力するレゾルバ2と、その出力をA/D変換するA/Dコンバータ18と、その出力から前記駆動軸の角度を計算する計算部17と、前記A/Dコンバータ18と同期して矩形波を生成する矩形波生成部14と、その矩形波から前記レゾルバ2に入力する正弦波電圧を生成する励磁波生成部1とからなり、前記駆動軸の回転角度の象限を判定する第1段階と、その判定された象限をさらに2等分に分割したときに、前記駆動軸の回転角度がどちらの側にあるかを判定する第2段階を経た後、その判定結果に応じて前記駆動軸の角度を計算することを特徴とする回転センサA。
(もっと読む)
埋設電流搬送導体が所定の最小深さの上に埋設されているか否かを判定するための方法および装置
電流搬送導体を検出するための検出器(1)は、専用の信号送信機によって導体に誘導される主電源または電磁信号の一方または双方の結果として電流搬送導体によって生成される電磁放射を検出するために、垂直の間隔を置いた一対のアンテナ(3,5)を具備する。検出器(1)は、埋設導体の深さを継続的に計算し、埋設導体が所定の最小深さの上にある場合は、聴覚および/または視覚アラームをトリガする。アンテナ(3,5)の感度を低下させることによって、アラームが鳴る横方向へのオフセット範囲が縮小され、埋設導体の位置を判定することができる。 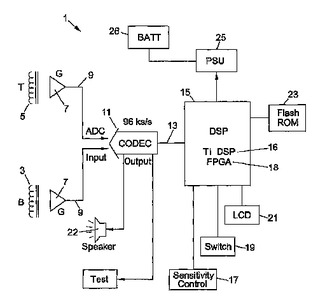 (もっと読む)
(もっと読む)
近接度の検出のために電荷移動静電容量センサを保護するための方法およびシステム
複数の検知電極および少なくとも1つの保護電極を有するセンサにおける近接度の検出のために可測キャパシタンスを決定する方法、システムおよび装置が記載される。電荷移動プロセスが、少なくとも2回の実行回数、実行される。前記電荷移動プロセスは、第1のスイッチを使用して前記複数の検知電極の少なくとも1つに所定の電圧を印加するステップと、第2のスイッチを使用して前記少なくとも1つの保護電極に第1の保護電圧を印加するステップと、前記複数の検知電極の前記少なくとも1つと、フィルタキャパシタンスとの間で電荷を再分配するステップと、前記少なくとも1つの保護電極に、前記第1の保護電圧と異なる第2の保護電圧を印加するステップとを有する。近接度の検出のために前記可測キャパシタンスを決定すべく、少なくとも1つの結果を得るために、少なくとも1回の測定回数、前記フィルタキャパシタンス上の電圧が測定される。 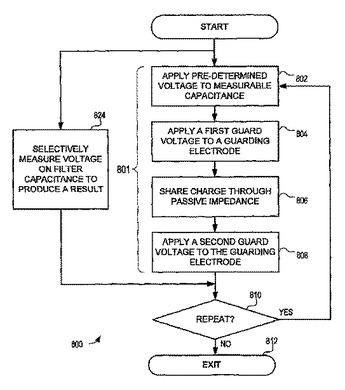 (もっと読む)
(もっと読む)
ポインティングデバイス,モーションセンサー並びに文字認識装置および位置データ演算方法
【課題】 磁気センサーにより画面上の特定位置を指定する磁気検出型入力デバイスにおいて、ホール素子の個数を少なくし、簡素かつ小型で一定の磁気検出精度を発揮させる。
【解決手段】 磁気ペン10によって描画されるパレット12と、Z軸方向と交叉する交叉面上の中心位置C2とパレット12上の中心位置C1とが同軸に配置され磁気ペン10の3軸各磁気成分に応じた3つの計測データを出力する磁気センサー14と、仮想パレット12上の中心位置を原点に設定し磁気センサー14から出力された3つの計測データと予め計測した3つの基準データとの各変化量を表す3つの磁気ベクトルのそれぞれに基づいて、磁気ペン10の位置データを計算する演算処理部5とをそなえて構成する。
(もっと読む)
回転角検出装置
【課題】回転角センサの出力を低回転角領域で増幅して用いる回転角検出装置において、該低回転領域でのセンサ出力−回転角変換特性を高精度に学習する。
【解決手段】ストッパで規制される最小回転角θ1と最大回転角θ2における回転角センサからの増幅しない出力(等倍出力)V1,V2から、第1変換特性におけるゲインdV/dθを学習した後、増幅した出力が選択される領域での小側および大側の回転角θmin、θmaxに対応する第1変換特性における出力Vmin、Vmax、同じく第2変換特性における出力Vnmin、Vnmaxに基づいて、第2変換特性におけるゲインdnV/dnθ{=(Vnmax−Vnmin)/(θmax−θmin)}を学習する構成とした。
(もっと読む)
二進数列の判別によるステアリングホイールの絶対角度位置の判定
本発明は、自動車両のステアリングホイール(2)の、車両のシャーシに対する絶対角度位置θを判定する方法に関する。本方法は、検出した二進数列が非反復的かを判定し、肯定である場合には、二進数列があるセクタにおいて非反復的である場合、エンコーダ(1)の絶対角度位置を判別すること、および前記非反復二進シーケンスに対応するステアリングホイール(2)の絶対角度位置θ2を判別することが、推定値によって可能となるかを検査し、否定であれば、前記二進数列に対応するステアリングホイールの絶対角度位置θ3を判別することが、推定値によって可能となるかを検査する。  (もっと読む)
(もっと読む)
近接センサー
電気容量を測定するためのセンサー18、接地材28および回路30を含み、クッションまたはマットレス内の人の相対的な沈み込みを判定するための、クッション10またはマットレス208と共に使用する沈み込みセンサー12。前記センサーは、導電性材料シートと、第2の導電性材料シートを含む接地材を含む。前記回路は、前記センサーおよびコンデンサー46に短い電流バーストを送るようになされている。前記回路はさらに、前記電流バーストが前記コンデンサーを充電するのに要する時間の長さを測定するようになされている。測定された時間に基づいて、前記回路は前記コンデンサーを充電するのに要した時間に基づいて対象物の近接度を計算する。前記沈み込みセンサーを使用して実行される方法も開示されている。 (もっと読む)
回転角度検出装置及び内燃機関の運転制御装置
【課題】 回転体の機械的誤差による影響を低減可能な回転角度検出装置及び内燃機関の運転制御装置を提供する。
【解決手段】 本発明の回転角度検出装置20は、内燃機関1のクランクシャフト8に取り付けられ、かつ複数の歯部21aが回転方向Dに沿って設けられた回転体21と、各歯部21aの前側エッジEf及び後側エッジEbのそれぞれを検出可能な電磁ピックアップ22及び波形整形器23と、を備え、検出された前側エッジEf又は後側エッジEbのいずれか一方を基準にしてクランクシャフト8の回転角度を検出する。そして、隣接する歯部21a間の角度で、前側エッジEfを基準とした角度θfと、後側エッジEbを基準とした角度θbとを算出し、これらの誤差Δθf,Δθbを比較して、前側エッジEf又は後側エッジEbのいずれか一方を回転角度の検出の基準として設定する。
(もっと読む)
RFIDセンサによるタイヤ歪み測定システム
【課題】 バッテリーを使用することなく、構造的に簡易で安価なシステム構成にてタイヤ歪みを測定することができる、RFIDセンサによるタイヤ歪み測定システムを得る。
【解決手段】 タイヤ内に、タイヤ歪みを抵抗値変化により検出するための磁気センサと歪み量に応じて磁気センサの抵抗値を変化させるためのマグネット及び当該磁気センサを接続して情報伝送を行うためのRFIDセンサから成るセンサユニットを内蔵し、各タイヤハウス内に、前記センサユニットのRFIDセンサと無線通信を行い応答信号よりRFIDセンサのID情報及び抵抗値を電圧信号に変換してスケーリングしたデータから成る計測データを読取るためのリーダーを配設し、各リーダーから得られた計測データを演算処理して各タイヤの歪みを測定するための演算制御装置と、タイヤ歪み情報を運転者に知らせるためのモニタとを備えて構成する。
(もっと読む)
スロットル制御方法及び装置
乗物のエンジン用電子式燃料制御システムに信号を伝達するためのスロットル制御装置は、電磁場発生器と、電磁場と近接して位置決めされた第1及び第2の電磁場センサとを含む。電磁場及び第1及び第2のセンサは互いに対して操作され、センサは、相対的な操作に対して応答する。センサは、前記相対的な操作を表す信号を独立して伝達するように形成されている。 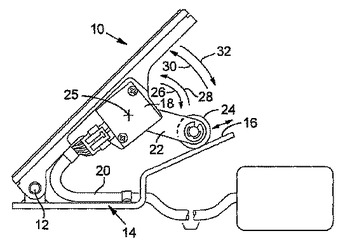 (もっと読む)
(もっと読む)
多周波位相解析を使用する検査方法及び検査システム
【課題】検査対象部品の内部の表面下検出を改善する表面下渦電流多周波検査技術を提供する。
【解決手段】部品検査方法は、検査対象部品に対して複数の多周波応答信号を発生させるために、プローブに複数の多周波励起信号を印加する。また、部品の表面下を検査するために、多周波応答信号に対して多周波位相解析を実行することを更に含む。検査システムは、部品内部に渦電流を誘導するように構成された渦電流(EC)プローブを含む。システムは、ECプローブに結合され、複数の多周波応答信号を発生するためにECプローブに多周波励起信号を印加するように構成された渦電流計器を更に含む。システムは、部品の表面下を検査するために、多周波位相解析を実行することによりEC計器からの多周波応答信号を解析するように構成されたプロセッサを更に含む。
(もっと読む)
位置検出装置および磁気センサ出力信号検出方法
【課題】 磁気センサの出力と比較する基準値(しきい値)を容易な方法でかつ正確な値に設定することができる位置検出装置および磁気センサ出力信号検出方法を提供すること。
【解決手段】 磁気テープ8は、ピッチλにて繰り返し着磁がなされており、磁気センサ7は、磁気テープ8に対し相対的に移動可能であり、移動に伴い繰り返しなされている着磁に応じて繰り返し変化する信号を出力する。比較器32、34は、磁気センサ7の出力信号を入力し、基準値Refと比較して比較結果をパルス信号として出力する。コントローラ35は、比較器32、34からのパル信号をカウントし磁気センサ7と磁気テープ8の相対的な移動量を演算し、演算された相対的な移動量に基づきレンズ4の位置を検出する。このとき、基準値Refは、磁気センサ7が非着磁部22aにおいて出力する出力値を取得して設定する。
(もっと読む)
静電容量検出装置及び電子機器
【課題】対象物表面の平坦部分でも対象物表面の距離検出(凹凸形状検出)が精度良く行える静電容量検出装置を提供する。
【解決手段】マトリクス状に配列された複数の静電容量検出器10と、マトリクス上で互いに近接する位置に存在する2つの静電容量検出器10を逐次的に選択する選択手段30と、選択された2つの静電容量検出器の2つの出力信号を比較する比較判別手段20と、を備え、選択された2つの静電容量検出器10のうち一方の静電容量検出器10は対象物と検出電極との距離に応じてレベル変化する静電容量に基づく出力信号Io(VG)を発生し、他方の静電容量検出器10は一定レベルの比較基準信号Ir(Vr)を出力する。
(もっと読む)
内部欠陥測定方法および装置
【課題】構造体の内部欠陥の大きさと深さを定量的かつ高精度に測定・評価できる欠陥の大きさと深さ評価方法および装置を提供することにある。
【解決手段】腐食減肉部の検出および残肉厚を算出する処理手順は、(1)検出データの収集(S10)強磁性体でつくられた構造体の外面を走査させることによって、磁束検出コイルにて検出データの収集を行う(2)位相検波処理(S20)基準となる信号を乗算した後、フィルタリング処理を行う(3)座標変換(S30)先に求めたベクトル座標の座標変換すなわち座標軸の回転を行う(4)減肉部の検出(S40)(5)欠陥径の推定(S50)各ch間の減衰の仕方(傾き)から欠陥径の推定を行う(6)残肉厚の算出(S60)の順に行う。
(もっと読む)
位置検出装置
【課題】被検出体の挙動に拘らず、その運動位置を正確にしかも高い信頼性のもとに求めることができる位置検出装置を提供する。
【解決手段】位置検出装置は、回転情報送信部100及び回転位置演算部200を備えて構成される。このうち回転情報送信部100は、回転センサ110を通じて検出されるクランク軸の回転角度に基づき同クランク軸の角度情報を生成し、該生成した角度情報をクランク軸の回転角度が所定の単位量となる毎に主導的に送信する。他方、回転位置演算部200は、この送信される角度情報をスレーブ装置として受信し、それら角度情報の開始エッジを計数してクランク軸の回転角度を求める。
(もっと読む)
金属検出装置
大きさが異なる金属の複数の異物サンプルをそれぞれ交番磁界中に通過させたときに検波部26から出力される信号のデータと各異物サンプルの大きさを示すデータとを予め記憶しているメモリ33を備え、設定手段32は、その異物サンプルのデータに基づいて、判定手段31によって検出可能な金属の大きさを表示器36に表示させる。また、混入金属表示手段34は、判定手段31で被検査体に金属が異物していると判定されたとき、その混入金属の大きさを表示器36に表示する。検出可能な金属の大きさや被検査体に混入している金属の大きさをユーザが直観的に把握できる。 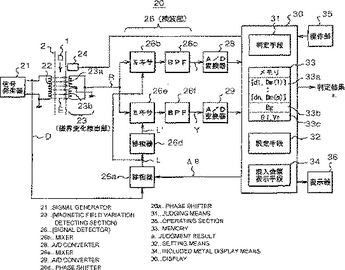 (もっと読む)
(もっと読む)
差動トランスの信号処理装置
【課題】ローパスフィルタによる動作遅れを防いで、応答速度の速い出力信号を得る。
【解決手段】差動トランスから応答速度の速い測定信号を得るための差動トランスの信号処理装置であって、差動トランスの出力信号をデジタル化する第1の高速アナログ−デジタル変換器60と、差動トランスの駆動信号をデジタル化する第2の高速アナログ−デジタル変換器64と、前記駆動信号により差動トランス出力信号を同期検波するデジタル信号処理手段(66)とを備える。
(もっと読む)
ソレノイド駆動装置
【課題】 電磁ソレノイドのプランジャの位置を検出するためのセンサ等を別途設けることなくプランジャの位置を判断する。
【解決手段】 このソレノイド駆動装置では、電磁ソレノイドのプランジャの位置に応じて変化する電磁ソレノイドのコイル22のインダクタンスを検出する。このため、プランジャの位置を検出するためのセンサ等を別途設けることなく、コイル22のインダクタンスに基づきプランジャの位置を判断することができる。特に、本ソレノイド駆動装置では、プランジャ駆動用のパルス電圧を印加している状態でのコイル電流の応答時間に基づきコイル22のインダクタンスを検出するようにしており、プランジャ駆動用のパルス電圧とは別にコイル22のインダクタンスを検出するためのパルス電圧を印加する必要がないため、コイル22のインダクタンスを効率的に検出することができる。
(もっと読む)
121 - 140 / 148
[ Back to top ]