
Fターム[2F063LA19]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | A−D変換 (148)
Fターム[2F063LA19]に分類される特許
101 - 120 / 148
位置検出装置および医療装置誘導システム
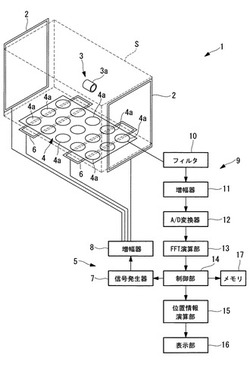
【課題】磁界検出部を検知体に近接して配置でき、装置の小型化、低コスト化を図りつつ、検知体の位置を精度よく検出する。
【解決手段】少なくとも1つの内蔵コイル3aを含む回路を備える検知体3が配置される検出空間Sに対し、少なくとも1つの磁界発生コイルを備え第1の磁界を発生させる第1の磁界発生部2と、発生された第1の磁界により内蔵コイル3aから発生される誘導磁界を検出するよう配列された複数の検出コイル4aを備える磁界検出部4と、第1の磁界発生部2により発生され検出コイル4aに入射する第1の磁界に対して略逆位相の磁界成分を有する少なくとも1つの磁界発生コイルを備え第2の磁界を発生させる第2の磁界発生部6とを備え、第1の磁界発生部2と検出コイル4aとが、第1の磁界の発生方向と、誘導磁界の検出方向とを交差させるように配置されている位置検出装置1を提供する。
(もっと読む)
外科用針を患者の身体の臓器へ進めるためのシステムおよび方法

【課題】外科用針を患者の身体の標的臓器へ進めるための新規の方法およびシステムを提供する。
【解決手段】外科用針106を患者の身体の標的臓器へ進めるためのシステム100であって、そのシステムが着脱可能なマンドレル108と、医療用測位システム(MPS)102と、電磁場発生装置104と、MPSセンサユニット110を含み、着脱可能なマンドレルが外科用針の内部に設置され、その着脱可能なマンドレルが外科用針に出し入れすることができて、その着脱可能なマンドレルの先端にMPSセンサが設置され、電磁場発生装置が電磁場を発生させ、MPSがMPSセンサおよび電磁場発生装置に連結され、電磁場に基づいてMPSセンサが出力を生成し、MPSがMPSの各座標系における着脱可能なマンドレルの先端の位置を確認し、MPSが着脱可能なマンドレルの先端の位置の各示度を生じ、外科用針を標的臓器へ進めることが可能になる。
(もっと読む)
レール高さ検出方法、レール高さ検出機構およびレール高さ変位量測定装置
【課題】
差動コイルを用いた電磁式の検出器を利用して検出器からのレール高さを特性グラフを参照して処理をすることで測定するレール高さ検出方法およびレール高さ検出機構を提供することにある。
【解決手段】
この発明は、隣接して配置され相互に逆方向に巻かれた第1、第2の空芯コイルを有しレールの頭部の上部に対応させて軌道検測車に設けられた電磁センサから第1、第2の空芯コイルのそれぞれの検出信号を得て第1、第2の空芯コイルの検出信号の和信号と差信号との比に基づいて電磁センサのレールに対する走行方向に直交する方向のずれ量を得て第1、第2の空芯コイルの検出信号の和信号と電磁センサのレールに対する高さとの関係を示す特性グラフを参照してずれ量に対応する特性グラフに基づいて電磁センサのレールに対する高さを得るものである。
(もっと読む)
位置計測システム
【課題】演算誤差を低減し高精度かつ高速に計測することのできる位置計測システムを提供する。
【解決手段】可動鉄片、該可動鉄片を励振する励振巻線L0および出力巻線L1を有する可動鉄片変圧器001と、前記可動鉄片変圧器の励振巻線を励振する励振信号を生成する発振器002、前記励振信号をA/D変換するA/D変換器003、A/D変換器出力をフーリエ変換するフーリエ変換部005、フーリエ変換された励振信号の振幅を算出する振幅値算出部007、前記出力巻線に発生する出力信号をA/D変換するA/D変換器004、A/D変換器出力をフーリエ変換するフーリエ変換部006、フーリエ変換された出力信号の振幅を算出する振幅値算出部008、フーリエ変換された励振信号の振幅を算出する振幅値算出部出力とフーリエ変換された出力信号の振幅を算出する振幅値算出部の比を演算する除算部009、および該除算部出力にしたがって前記可動鉄片の位置を演算する位置演算部010を有する計測装置500を備えた。
(もっと読む)
回転角度検出装置
【課題】回転角度検出装置の部品点数を削減できると共に、検出回路の出力信号の誤差要因が少なくなるため、ロジック回路や増幅回路を簡略化でき、回転角度検出装置のコストダウンを達成する。
【解決手段】コイル及び抵抗体からなる検出素子部を含む検出回路と、コイルのインダクタンスを被測定回転体の回転に応じて変化させるインダクタンス変化手段とを有する角度検出手段を備え、さらに検出回路に出力信号を発生させるための基準パルス電圧発生手段と、検出回路の出力信号を演算する演算手段とを備えている回転角度検出装置であって、演算手段は、基準パルス電圧発生手段で発生した基準パルス電圧を前記検出回路に入力した際に生じる過渡現象的出力電圧を所定時間積分して積分値を求め、該積分値に基づいて前記被測定回転体の回転角度を検出する。
(もっと読む)
レンジ検出装置
【課題】レンジを正確に検出するレンジ検出装置を提供する。
【解決手段】レンジ検出装置は、自動変速機のバルブボディに取り付けられている固定部36と、レンジの選択に応じて固定部36に沿って往復移動する可動部とを備えている。可動部には磁石が設けられている。磁石の磁極は可動部の往復移動方向に変化している。固定部36にはホール素子51〜53が設けられており、可動部が往復移動すると、ホール素子51〜53と向き合う磁石の磁極が変化する。ホール素子51〜53は、可動部の往復移動に伴う磁極の変化に応じた検出信号を出力する。また固定部36には、バルブボディ側に延びる棒状の位置決め部70が形成されている。位置決め部70はバルブボディに形成された凹部と嵌合する。これにより固定部36は、バルブボディに対し往復移動方向に位置決めされる。この位置決め部70は、ホール素子51〜53と往復移動方向に重複して配置されている。
(もっと読む)
位置検出システム、位置検出システムを用いた光学系と撮像装置
【課題】複数の磁気式の位置検出装置を近接して配置しても、磁場の位置検出精度への相互干渉を抑えることができ、高精度かつ小型である位置検出システムを提供する事にある。
【解決手段】各位置検出装置の磁石の着磁方向ベクトルが同一平面上になく、かつ着磁方向ベクトルが直交化方向成分を有する様に磁石を配置し、動く磁石の着磁方向ベクトルの移動方向が他方の磁石の着磁方向ベクトルの対称面に含まれる様にする。同時に磁気センサが他方の着磁方向ベクトルの直交成分を検出できるようにする事が好ましい。
(もっと読む)
移動体の位置検出方法及び装置
【課題】移動体が既に検査を終了した領域と、未検査領域との区別が明確に行え安全かつ高精度に移動体の位置を検知できるようにする。
【解決手段】移動体Aに設けた磁気を発信する送信コイル5と、送信コイル5が発信する磁気を受信する複数の受信コイル61,62を同一平面状において離隔配置した基準具6と、受信コイル61,62で受信した磁気情報に基づいて当該各受信コイル61,62から前発信コイル5までの距離を演算し、得られた各距離情報に基づいて発信コイル5の座標位置を決定し、出力する演算手段を有する。
(もっと読む)
舵角センサ
【課題】 より高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト103に取り付け、当該ステアリングシャフトの絶対角度を測定するための舵角センサ1であって、当該ステアリングシャフトと連動して可逆回転する主動ギア7と、主動ギアと連動して回転する微信号用ギア19の回転角度を検出する第1検出手段と、主動ギアと連動して回転する粗信号用ギア45gの回転角度を検出する第2検出手段と、を備え、当該第1検出手段は、検出した当該微信号用ギアの回転角度を示す微信号を出力するホール素子及び磁石を含めて構成してあり、当該第2検出手段は、検出した当該粗信号用ギアの回転角度を示す粗信号を出力するポテンショメータを含めて構成してある。そのため、なるべく少ない部品点数で、隣接する検出手段相互の磁束の影響を受けない、より高精度の舵角センサを提供することができる。
(もっと読む)
位置検出方法及び撮像装置
【課題】 MR素子から出力される正弦波信号の計測誤差を等しくし、正確な位置検出を行うことができる位置検出方法及びその位置検出方法を適用した撮像装置を提供する。
【解決手段】 MR素子から出力される、位相角が90度異なる正弦波信号を正弦波信号周期の2のべき乗分の1の所定のサンプリング周期でサンプリングし、そのサンプル値の最大値MAXDSA,MAXDSBと最小値MINDSA,MINDSBを用いて、2つの正弦波信号のオフセット値を示す初期化パラメータC,Dを算出する。
(もっと読む)
硬貨認識装置
【課題】硬貨の側面に対応する位置に配設された反射型磁気センサの出力に基づいて硬貨の外径を検出することによって、異物の影響を受けず、硬貨を搬送する搬送ベルトの実装の妨げにならず、硬貨の金種の判定精度が高いようにする。
【解決手段】搬送ベルトによって搬送される硬貨11の外径を検出する硬貨認識装置10であって、搬送される硬貨11の側面に対応する位置に配設された反射型磁気センサ12と、該反射型磁気センサ12の出力に基づいて前記硬貨11の外径を検出する検出回路20とを有し、検出された外径に基づいて硬貨11の金種を判別する。
(もっと読む)
三次元変位計測システム
【課題】 被測定対象物の6自由度の挙動の計測が的確に行え、安価で且つ小型化を図り得ると共に、被測定対象物に取付ける際の位置決めの容易化を図る。
【解決手段】 三次元変位計測システムを構成する三次元変位検出ユニット14は、そのセンサ本体1を被測定対象物のうち、不動部に取付け、測定子8を、被測定対象物の変動部に取付ける。この状態で、測定子8に上記変動部からの振動や変位を受けると、連結ロッド6が水平軸4を中心として第2の回転部材5を回転し、あるいは連結ロッド6が垂直軸3を中心として、第1の回転部材2を回転する。また、連結ロッド6も測定子8の移動によって伸縮する。すると、第1の回転部材2の回転角は、第1の角度検出器9により、また、第2の回転部材5の回転角は、第2の角度検出器10により、また、連結ロッド6の伸縮変位量は、変位変換器11により、それぞれ検出される。
(もっと読む)
回転角度検出装置
【課題】回転角度を検出するに際してその検出精度を確保することができ、しかも、例えばその角度検出の際に用いる正弦波信号及び余弦波信号を回転角度検出装置以外の他の機器で用いた場合であっても、その共用先の機器がこれら正弦波信号及び余弦波信号を用いて処理を行う際に、その処理精度についても確保することができる回転角度検出装置を提供する。
【解決手段】第1従動ギア3の回転を検出する第1磁気抵抗素子5は、角度変位に対して出力が正弦波をとる第1正弦波信号Vs1と、角度変位に対して出力が余弦波をとる第1余弦波信号Vc1とをCPU9に出力する。CPU9はフーリエ変換及び逆フーリエ変換を用いてこれら信号Vs1,Vc1を補正し、補正後の信号Vs1,Vc1から逆正接Arctanθaを算出してこれを第1従動ギア3のギア角θaとして認識する。CPU9はギア角θaを用いて、主動ギア2のギア角θx、即ちステアリングホイールの操舵角度を算出する。
(もっと読む)
回転角度検出装置
【課題】歯車のがたつき、バックラッシなどにより検知精度の向上が困難なものに対し、簡易な構成で多回転する回転体の回転角度を高精度・高分解能に検出できる回転角度検出装置を提供することを目的としている。
【解決手段】ステアリングシャフト等のトーションバーを有する軸部1と、この軸部1の回転角度を検出する回転角度検出部2と、トーションバーの捩り角度を検出するトルク検出部3とを備え、トーションバーの捩り角度は軸部1の回転角度よりも小さくするとともに、トーションバーの捩り角度に基づいて軸部1の回転角度を検出する構成である。
(もっと読む)
半導体加工ツールにおける静電容量距離検出
ワイヤレスセンサ(10、100、200)は、半導体加工環境内で対象物体(14)に対する距離を検出するための少なくとも一つの静電容量板(10、12;102、104)を包含する。センサ(10、100、200)は、内部電力源(28、342)およびワイヤレス通信(362)を包含し、静電容量板(10、12;102、104)を使用してもたらされる距離および/または平行度測定をワイヤレスで外部装置に提供することができる。 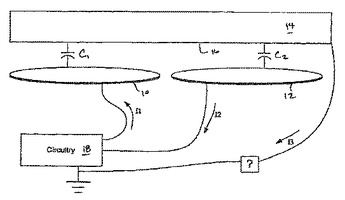 (もっと読む)
(もっと読む)
センサモジュールオフセットキャンセル回路
【課題】センサモジュールオフセットキャンセル回路の小型化。
【解決手段】ひずみセンサと、オペアンプ(27〜29)と、AD/DA変換器を制御するコントローラと、コントローラに接続されるRFICと、RFICに接続されるアンテナとを有し、ひずみセンサはブリッジ回路で形成され、第1の端子bから電圧Vin-を出力し、第2の端子dから電圧VIN+を出力し、電圧VIN-は第1の入力抵抗を介して27の非反転入力端子に送られ、電圧VIN+は第2の入力抵抗を介して28の+端子に送られ、27の出力端子は29の反転入力端子に接続され、28の出力端子は29の+端子に接続され、29の出力はAD変換器に送られ、29の電源端子にはCPUからゲイン調整信号が送られ、28の+端子とDA変換器との間には第3の入力抵抗が接続されてDA変換器から第3の入力抵抗を介してアナログ出力電圧が送られる。
(もっと読む)
回転角検出装置とその異常検出装置及び電動パワーステアリング装置
【課題】レゾルバ出力信号から、角度を正確に検出でき、電動パワーステアリング等の回転角検出装置の異常を検出し、そのバックアップを可能とする。
【解決手段】回転軸に備えたレゾルバ1に、励磁信号生成部2から励磁信号を出力し、変換器3でディジタル信号に変換し、CPU4に回転角信号を入力するステアリング回転角検出の主系に対し、その異常を検出する異常検出装置を備えた回転角検出装置において、励磁信号の周期を逐次測定する手段(ゼロクロス検出部6,カウンタ8)と、周期測定結果よりオフセット量を算出し、AD変換のタイミング信号を生成する手段(ワンショット生成部9)とにより、前記レゾルバ出力のピーク値を読み込むとともに、前記変換タイミング信号のオフセット量を調整する手段(オフセット加減算部10,SPI11)を備えた。
(もっと読む)
回転角度検出装置および回転角度検出装置付き軸受
【課題】 高速かつ高精度の回転角度検出装置、およびその回転角度検出装置を備えた軸受を提供する。
【解決手段】 磁気発生手段に回転中心の軸方向に配置された複数のライン状の磁気センサアレイと、その出力をデジタル信号に変換するAD変換回路と、出力から磁界分布のゼロクロス位置を検出するゼロクロス位置検出手段と、ゼロクロス位置から磁気発生手段の回転角度を検出する角度計算手段とを備える。検出されたゼロクロス位置を記憶する検出位置記憶手段と、記憶されたゼロクロス位置を元に所定の基準で磁気センサアレイの次回のスキャン範囲を設定するスキャン範囲設定手段と、スキャン範囲設定手段で設定したスキャン範囲で磁気センサアレイ検出信号を読み出すスキャン回路とを設ける。スキャン範囲として限定された部分的な検出信号を用いてゼロクロス位置を検出し、この部分的な検出信号から検出されたゼロクロス位置から回転角度を検出する。
(もっと読む)
位置検出方法
【課題】 1つのA/D変換器を使用して、正確な位置検出を行うことができる位置検出方法を提供する。
【解決手段】 位置検出用の2つのMR素子から出力される正弦波信号を、所定サンプリング周期で交互にサンプリングして得られたデータMRA’(n)、MRB’(n)の一方の信号の2サンプリング周期前のサンプリングデータと他方の1サンプリング周期前のサンプリングデータから、一方の信号の1サンプリング周期前のデータに対応する推定値を算出し、この推定値と他方の信号の1サンプリング周期前のサンプリングデータから正弦波信号の振幅を算出する。この振幅と一方の信号の今回のサンプリングデータを対応する逆三角関数に適用し、対象物の位置を求める。
(もっと読む)
マルチターン用非接触式角度位置センサ
【課題】より優れた分解能と直線性精度のマルチターン用回転位置センサの提供。
【解決手段】この角度位置センサは、主歯車と、第1および第2の歯車と、第1および第2の角度位置センサアセンブリとを含む。主歯車は、シャフトに搭載することが可能であり、および、この外周に形成される複数の歯を有する。第1および第2の歯車は、主歯車の歯と係合する第1および第2の歯をそれぞれに有する。第1および第2の角度位置センサアセンブリは、それぞれに第1および第2の歯車と共に回転するように連結される第1および第2のカプラディスクをそれぞれに含む。第1および第2の角度位置センサアセンブリは、第1および第2のカプラディスクの360度の一回転に対応する第1および第2の出力信号をそれぞれに生成する。PWM生成器が第1および第2の出力信号に従ってPWM出力を生成する。
(もっと読む)
101 - 120 / 148
[ Back to top ]