
Fターム[2F063LA19]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | A−D変換 (148)
Fターム[2F063LA19]に分類される特許
81 - 100 / 148
心肺蘇生中に圧迫パラメータを測定するためのCPR補助装置
場発生器、場検出器、およびプロセッサを備える、患者に対して心肺蘇生法(CPR)を適用する間に、少なくとも1つの圧迫パラメータを特定する装置。位置情報および圧迫パラメータは、場検出器によって検出される場から特定される。場発生器および場検出器の一方は、位置センサであり、他方は基準センサである。 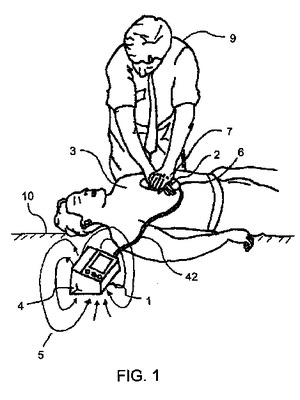 (もっと読む)
(もっと読む)
表面形状認識センサ装置
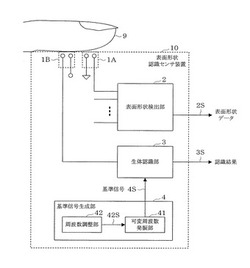
【課題】小さな回路規模で高い生体判定精度を得る。
【解決手段】基準信号生成部4に、入力された周波数調整値42Sに応じた一定周波数の基準信号4Sを生成する可変周波数発振部41を設け、例えば表面形状認識センサ装置10の起動時など、第2のA/D変換部31でのA/D変換動作が実行される以前に、制御部25からの調整動作制御信号4Rに基づいて、基準信号4Sの周波数を調整するための周波数調整動作を実行し、カウント部43からの計数結果4Xが所定の許容範囲に収まるよう周波数調整値42Sを変更することにより、基準信号4Sの周波数を調整する。
(もっと読む)
操作位置検出装置及びシフト装置

【課題】1つのセンサエレメントの故障に対する冗長性及び入力操作位置の検出信頼性を確保しつつ小型化が可能な操作位置検出装置を提供する。
【解決手段】操作位置検出装置は、それらから出力される二値化信号の組み合わせが、ハミング符号に準拠したものとなるように設けられた複数の磁気抵抗素子31〜37を備えている。操作位置検出装置は、複数の磁気抵抗素子31〜37の検知面に作用する磁界の方向に応じて出力される二値化信号の組み合わせに基づいて、該二値化信号の組み合わせの誤り信号位置を特定し、この特定された信号位置の二値化信号を訂正する。
(もっと読む)
表面形状認識センサ装置
【課題】容量検出領域内にインピーダンス検出ユニットを配置して生体判定を行う場合でも、表面形状認識率の低下を抑制する。
【解決手段】データ補填部50により、A/D変換部27からの凹凸データ27Aのうちインピーダンス検出ユニット30の配置領域に隣接する容量検出ユニット20の配置位置の凹凸データに基づいて、選択列のうち配置領域の行範囲における凹凸データ27Aを補填する補填データを生成し、凹凸データ50Sとして行セレクタ28へ出力する。
(もっと読む)
位置検出装置
【課題】簡単な構造で安価に検知領域の範囲に近接等する検知対象物の位置や距離を確実に検出し、設計自由度を向上させる。
【解決手段】位置検出装置100は、静電容量センサ部10および検出回路部20を備え、静電容量センサ部10は、第1および第2検知電極11,12と、これらの間に配置された誘電体19とからなる。誘電体19は検知面19a上に検知領域の範囲Lを形成する。検出回路部20は、切替スイッチSWA,SWBと、静電容量検知回路21,22と、A/D変換器23,24と、演算処理回路25とを備え、切替スイッチSWA,SWBの切替制御により、第1検知電極11で検知された静電容量の検出値C1と第2検知電極12で検知された静電容量の検出値C2とから、演算処理回路25によって検知領域の範囲Lにおける検知対象物の位置を判定して検出する。
(もっと読む)
入力装置、及びそれを備えた表示装置
【課題】静電容量方式のタッチセンサを表示装置に近接して設置した場合にも、精度劣化無く検出可能とする技術の提供。
【解決手段】指などの接触による静電容量の変化を、その充電状態として反映する電荷蓄積容量の基準電位を、静電容量検出のための手順の各段階に応じて適宜切り替える機能を設け、ノイズの影響が低減される様にした。
(もっと読む)
シャフト型リニアモータの位置検出装置
【課題】予め作成された補正データテーブルを用いて、可動子の検出位置を補正するにあたり、補正データテーブルとの同期化を容易にする。
【解決手段】可動子3を直線的に駆動させるシャフト型リニアモータ1の位置検出装置4であって、可動子3に設けられる磁気センサSと、磁気センサSが検出したシャフト2の磁束に基づいて可動子3の位置を検出すると共に、予め作成された補正データテーブルを用いて、可動子3の検出位置を補正するにあたり、可動子3の原点位置を認識し、補正データテーブルとの同期化を行う必要があるが、原点位置は、予め作成された原点データに基づいて特定される電気原点とし、磁気センサSの検出信号から得られる検出データが原点データに一致したとき、現在の可動子位置を原点位置として認識する。
(もっと読む)
回転検出器
【課題】筆記具としての機能を損うことなく、正確な測長が可能な測長機能付ボールペンに使用して好適な回転検出器を提供する。
【解決手段】着磁されたボール12を抱持するホルダ14の近傍にMI(磁気インピーダンス)素子を有する磁気センサ16,18を、その感磁方向がボール12とホルダ14による磁力線に直角になるように対向配置する。磁気センサ16,18の出力においてその増加パターンおよび減少パターンを検出することによってボール12の回転を検出する。
(もっと読む)
シートのたるみ評価方法および評価装置
【課題】比較的構造が簡単でメンテナンスが容易な装置を用いて、精度よくシートのたるみを評価すること。
【解決手段】空間を移送されるシート1の表面にタッチローラー2を押し当て、該タッチローラーの変位量を測定することにより、タッチローラーを押し当てた位置におけるシートのたるみを評価する。
(もっと読む)
測長機能付ボールペン
【課題】筆記具としての機能を損うことなく、正確な測長が可能な測長機能付ボールペンを提供する。
【解決手段】着磁されたボール12を抱持するホルダ14の近傍にMI(磁気インピーダンス)素子を有する磁気センサ16,18を、その感磁方向がボール12とホルダ14による磁力線に直角になるように対向配置する。磁気センサ16,18の出力においてその増加パターンおよび減少パターンを検出することによってボール12の回転を検出する。
(もっと読む)
レゾルバの異常検出装置および電気式動力舵取装置
【課題】レゾルバの異常を高精度に検出し得るレゾルバの異常検出装置および電気式動力舵取装置を提供する。
【解決手段】判定ブロックB1において順次演算される2乗和S1のうち最大値である最大2乗和S1maxと最小値である最小2乗和S1minとがメモリに記憶される。そして、全判定ブロックB1〜B5における各最大2乗和S1max〜S5maxのうちの最大値である異常判定用最大2乗和Smaxと各最小2乗和S1min〜S5minのうちの最小値である異常判定用最小2乗和Sminとの差が、異常判定用閾値Skを超える場合に、モータレゾルバが異常であると判定される。このとき、各判定ブロックB1〜B5の検出単位時間tsの合計が判定時間taよりも短くなるように各判定ブロックB1〜B5が設定されている。
(もっと読む)
容量的に間隔を検出するためのセンサ装置
本発明は、車両にあるセンサ装置と対象物との間の間隔を容量的に検出するためのセンサ装置に関するものであり、このセンサ装置は対象物と容量的配置を形成するための電極と、この容量的配置のキャパシタンスに比例する信号を生成する装置とを有する。このセンサ装置は、対象物(2)と容量的基準配置(9)を形成するための基準電極(7)と、この容量的基準配置(9)のキャパシタンス(C2)に比例する基準信号(IR)を生成するための別の装置(13)と、信号(I)と基準信号(IR)との比を形成することにより間隔(d)を求めるための評価装置とをさらに有し、前記基準電極(7)の電極形状は電極(5)の電極形状とは異なることが提案される。 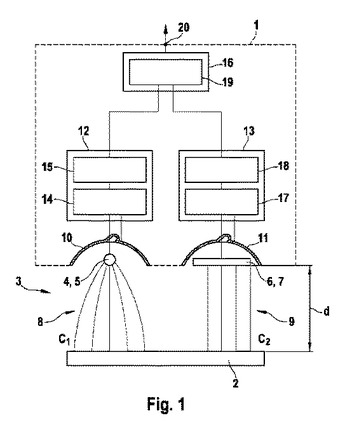 (もっと読む)
(もっと読む)
動き検出装置、動き検出方法及び電子機器
【課題】動作対象の動きを簡易に検出することができるようにする。
【解決手段】本発明は、動き検出システムにおいて、識別指標によって区別された複数周波数からなる準静電界を、少なくとも2以上の電界発生源から発生する準静電界発生装置と、動作対象に設けられ、準静電界の受信周波数に基づいて各電界発生源までの距離をそれぞれ判定し、当該判定した各距離を通知する距離判定装置と、距離判定装置により通知される各距離に基づいて距離判定装置の位置を算出し、当該算出した位置と予め保持された基準位置との変化量を動作対象の動き量として検出する動き検出装置とを設けるようにした。
(もっと読む)
回転角度検出装置及び回転機
【課題】回転角度の検出精度が高い回転角度検出装置及び回転機を提供する。
【解決手段】2極磁石を有する磁石回転子と、前記磁石回転子からの磁束の向きを検知するセンサデバイスとを備えた回転角度検出装置であって、前記センサデバイスは、複数のスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁場の向きに応じて回転する磁気抵抗素子)で構成された感磁面を有し、磁束を前記感磁面と交差させて、前記感磁面内で直交する磁束密度成分同士の振幅の大きさが等しくなるように、前記磁石回転子に対して前記センサデバイスが設けられていることを特徴とする回転角度検出装置。
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 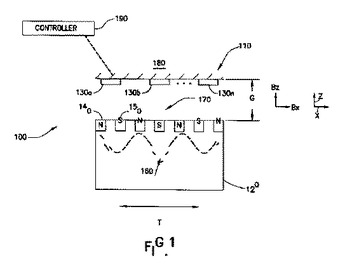 (もっと読む)
(もっと読む)
回転角検出装置、及び電動パワーステアリング装置
【課題】サンプルホールド回路を廃止し、モータ制御とA/D変換が重ならないようにsin/cos波形を取得してモータの回転角θを検索する回転角検出装置を提供する。
【解決手段】 レゾルバ41に正弦波励磁電圧を入力するとEsin電圧及びEcos電圧が出力される。Esin電圧及びEcos電圧は、A/D変換器59へ直接入力される。A/D変換器59は、第2のタイマ68のタイミングでEsin電圧及びEcos電圧をA/D変換してsin波形とcos波形を取得する。さらに、除算器60がsin波形とcos波形からtanθを算出し、tanθ→θ変換MAP61がtanθよりモータ7の回転角θを求め、その回転角θに基づいてベクトル制御部64がモータ7のベクトル制御を行う。このとき、モータ制御中においては、ベクトル制御装置69からA/D変換器59へA/D変換禁止信号が送信されるので、回転角θは更新されない。
(もっと読む)
状態検出装置およびレーザ加工装置
【課題】レーザ加工ノズルとワークの間の状態、例えば、ギャップ長やプラズマなどを精度良く検出できる状態検出装置などを提供する。
【解決手段】状態検出装置1は、レーザ加工ノズルに設けられた測定電極とワークWの間に参照信号を供給する信号発生回路10と、測定電極とワークWの間の状態に応じて変化する電気信号を測定するバッファ回路20およびA/Dコンバータ21と、環境温度を検出する温度検出回路30と、電気信号の測定データおよび検出した環境温度に基づいて、検出対象である状態、例えば、ギャップ長やプラズマなどを演算するための演算回路40などで構成される。
(もっと読む)
位置検出システムおよび位置検出方法
【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとがともに存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により、所定の周波数だけ離れた一組の第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、一組の第1の位置算出用周波数に挟まれた略中心の周波数を共振周波数とする磁気誘導コイル5を搭載した第2のマーカ3と、その作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から一組の第1の位置算出用周波数を有する一組の第1の検出磁界成分の強度の加算値を抽出する抽出部30と、抽出された加算値に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
相対変位測定センサーが設けられたダンパー
【課題】 相対変位測定センサーが設けられたダンパーを提供する。
【解決手段】内部に中空部を有するシリンダー11と、シリンダーの上部から挿入され、表面に多数の凹部と多数の凸部が交代に形成されたグルーブパターンを有するピストンロッド13と、ピストンロッドの端部に連結されてシリンダーの内部で往復運動を行い、上下に貫通された流体通過孔を有するピストンバルブ12と、シリンダーの上端を密閉しながらピストンロッドの直線運動をガイドし、一側に貫通孔を有するロッドガイド14と、ロッドガイドに結合し、ピストンロッドが移動するとき発生する磁場の変化を用いてピストンロッドの動きを非接触式に感知するセンサーモジュール100とを含むダンパー10に関するものである。
(もっと読む)
多回転絶対角検出装置
【課題】360度以上の角度範囲内の絶対角度を高精度に検出可能な多回転絶対角検出装置を提供する。
【解決手段】機構部に、回転体1と、回転体1に従動する従動回転部材2と、従動回転部材2に従動して間欠的に回転する間欠回転部材3と、従動回転部材2に取り付けられた磁石4と、磁石4と対向に配置され、従動回転部材2の1回転を1周期とする正弦信号及び余弦信号を出力する磁気センサ5と、間欠回転部材3に形成された第1及び第2のコードパターン6,7と、これらの各コードパターン6,7に対向して配置された第1乃至第7の検出素子8〜14とを含む。検出素子8〜14の出力信号に基づいて回転体1の1回転を等分するセクタを識別し、正弦信号及び余弦信号から算出される逆正接値に基づいてセクタ内の絶対角を検出する。回転体1と従動回転部材2との間に、中間回転部材23を配置することもできる。
(もっと読む)
81 - 100 / 148
[ Back to top ]