
Fターム[2F065AA01]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734)
Fターム[2F065AA01]の下位に属するFターム
Fターム[2F065AA01]に分類される特許
401 - 420 / 613
トンネル内位置検出装置
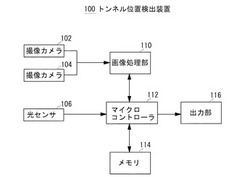
【課題】 GPS衛星からの電波が受信できないトンネル内でも、自車位置が正確を正確に検出することができる「トンネル内位置検出装置」を提供する。
【解決手段】 マイクロコントローラ112は、光センサ106の出力に基づき、車両がGPS衛星からの電波が受信できないトンネル内に進入したと判定すると、トンネル内位置検出プログラムを起動する。これにより、車両に設置された撮像カメラ102、104はトンネル内を撮像し、画像処理部110によってトンネル内の照明と自車位置との相対的な位置関係を検出する。この相対的な位置関係に基づき、それぞれの照明間における自車の左右位置、前後位置を算出することで、トンネル内の自車位置を検出する。これにより、トンネル内での正確な自車位置が特定され、ユーザに対して正確な誘導案内を提供することを可能にする。
(もっと読む)
はんだ濡れ性評価装置およびはんだ濡れ性評価方法

【課題】はんだの濡れ性を簡素な装置構成で且つ短い処理時間で検査することができる装置および方法を提供する。
【解決手段】準備工程としての基準接触角決定工程および検査光傾角設定工程で、基準とする接触角を予め決定し、且つ光源一体型カメラの光源から照射する検査光の照射角を前記接触角に対応する平面に垂直となるように設定し、光源等移動工程で位置合わせして傾角を設定された検査光を検査対象はんだフィレットの表面に照射し、フィレット面撮像工程ではんだフィレットの表面の画像を撮像し、画像処理工程でその画像を二値化等の処理をし、はんだ濡れ性評価工程でその処理結果を用いてはんだ濡れ性の良否を判定する。
(もっと読む)
観察装置及び端面欠陥検査装置
【課題】基板の端面部に接触することが無いいため端面部に影響を与えることがなく、ウエハの反りなどの形状による面振れ等にも適応した観察が可能な観察装置及び端面欠陥検査装置を提供する。
【解決手段】本発明は、基板の端面部を撮像する撮像装置と、基板を保持し回転可能な保持部と、基板の端面部の位置の変動量を検出する変位検出部と、撮像された画像を表示する表示部と、変位検出部からの信号をもとに撮像部で撮像された基板の端面部の画像が表示部上の一定の位置に観察されるよう制御する制御部とを備える観察装置及び端面欠陥検査装置である。
(もっと読む)
光ファイバ振動検知システム
【課題】2つの監視区間の境界位置近傍で振動が発生した場合にも、その振動が発生した監視区間を正確に判別できる光ファイバ振動検知システムを提供する。
【解決手段】光ファイバリングを構成する光ファイバ2を振動監視ラインに沿って配索し、振動監視ラインを複数の監視区間D1〜D4に分割し、前記光ファイバ2内を伝送した出力光より振動レベルを検知し、警報レベル以上の振動を検知した場合には、出力光より演算によって振動位置を求め、振動が発生した監視区間を判別する光ファイバ振動検知システム1Aであって、光ファイバ2には、監視区間の境界位置に、少なくとも演算による位置誤差相当長さの余長部2aを設け、この余長部2aを外的振動によって振動しないように設置した。
(もっと読む)
対象物検出システム、作動装置制御システム、車両
【課題】 車両乗員席上の対象物に関する情報を、精度良く検出するのに有効な技術を提供する。
【解決手段】 車両に搭載される対象物検出システム100では、光学レンズ114及び距離計測イメージチップ116と、照明装置130を備えるカメラ112を用いて車両乗員席上の対象物に関する情報を検出する構成において、特に照明装置130は、発光態様の制御が複数の第1光源131及び第2光源132に区画されて個々に行われる構成とされる。
(もっと読む)
金属部材、位置検出装置、駆動装置、物体検出装置および金属部材の加工方法
【課題】光の反射を利用して位置が検出される金属部材を用いた位置制御機構を備えた物体検出装置において、傷の影響による位置検出精度の低下を小さくする。
【解決手段】板バネ202aおよび202bによって支持された可動部材205にレンズ部206が設けられ、電磁力を利用した駆動手段218によってレンズ部206が矢印AまたはBの方向へ動かされる。この構成において、板バネ202bの位置を検出するための検査光が照射される領域204を粗面化し、検査光を乱反射させる。こうすることで、板バネ202bの表面に傷が付いても、それが板バネ202bの位置検出精度に影響しないようにする。
(もっと読む)
光学式形状検査装置及び方法
【課題】板材の表面に映った棒状光源の虚像を撮影して板材の形状を測定する際に,板の幅方向の傾きや板の上下動に影響を受けることなく,板の長手方向の傾きを求めて高精度に形状を検出する形状検出装置及び方法を提供する。
【解決手段】搬送される板材1に,棒状光源3からの出射光を照射して板材面に写った棒状光源3の虚像を画像として撮像手段3で連続的に採取し,棒状光源3を板材1の搬送方向且つ幅方向に垂直に配設し,出射光に棒状光源3の長手方向位置情報を付加し,長手方向位置情報を含む虚像の撮影画像に基づいて,板材1の形状を演算する。
(もっと読む)
表面欠陥検査装置、表面欠陥検査方法及び表面欠陥検査プログラム
【課題】一次元撮像手段により一次元撮像手段と検査対象物の相対的な距離の変動を検出することで、高い精度で検査対象物の欠陥を検出する。
【解決手段】回転する検査対象物に対して、副走査方向の斜め方向に輝度が異ならせた縞の入ったパターン光を照射するライン光源と、照射されたパターン光の検査対象物から反射した光により、検査対象物に対して主走査方向で一次元の撮像を行うラインセンサと、撮像されたライン画像の輝度の位相の変化を検出する位相検出部と、位相の変化から検査対象物とラインセンサの相対的な距離を一定に保つためにラインセンサの位置を制御する撮像位置制御部と、を備える。
(もっと読む)
画像を用いた自動運転装置及び自動運転方法
【課題】照明光の状態等によらず、可動部の位置を正確に検出して制御を行うことが可能な自動運転装置及び自動運転方法を提供する。
【解決手段】1回の動作を分割した複数の動作ステップを経て移動し、動作を繰り返す可動部(10、20)を有する自動運転装置100は、露光量調節手段31により露光量を調節して可動部(10、20)を撮影した画像データを取得する撮像部30と、制御部であって、可動部(10,20)の移動及び停止を行う動作指示手段41と、画像データが可動部(10、20)の位置検出に適しているか否かを判定する画像適否判定手段42と、位置検出処理に適していると判定された画像データに基づいて可動部(10、20)の位置を検出する位置検出手段43と、可動部(10,20)の位置に基づいて可動部(10,20)が移動目的地に到達したか否か判定する移動終了判定手段44を有する制御部40とを有する。
(もっと読む)
三次元形状測定装置
【課題】本発明の目的は、光路長の連続可変を高速で行い、かつ測定系の応答遅れを解決して、高速で形状測定を行える技術を提供することである。
【解決手段】ビームスプリッター5が、広帯域光を受けて、参照鏡を有する参照光路と被測定物を配置した測定光路とに分岐して入射させて照射し、参照鏡からの反射光と被測定物の照射された照射範囲の各照射位置からの反射光を合波して出力し、ピエゾ8が、測定光路の光路長を連続可変し、カメラ10がピエゾ8による該光路長の可変に応じた所定時間間隔で、ビームスプリッター5からの出力を撮像することによって干渉縞のデータを取得し、光路長検出手段14が、カメラ10からのデータを基に干渉縞が生ずる時間位置を基に各照射位置の特定光路長として表し、変位演算手段15が、光路長検出手段14によって出力される、一照射位置の特定光路長と他の特定光路長との差を基に、各照射位置の相対的変位を求める構成とした。
(もっと読む)
三次元形状測定装置及び三次元形状測定方法
【課題】自動的に焦点を合わす構成にすることにより初期時の調整時間を極力少なくして、測定時間早めることができる技術を提供する。
【解決手段】白色光を、対物レンズ4を介してビームスプリッター5へ入射させて、反射鏡6側の参照光路と被測定物側の測定光路に分岐して入射させ、光路長可変手段8により測定光路の光路長を変更し、カメラ10が干渉光を撮像し、その撮像データを基に干渉の生ずる光路長を求めることにより被測定物の形状測定を行う三次元形状測定装置であって、ミラー25により投光用光源12からの測定光を白色光の光路と同じ光路に導入し、対物レンズ4を介して被測定物から戻ってくる測定光をカメラ10で撮像し、Z軸制御手段20が、カメラ10の出力を基に対物レンズ4と前記被測定物との距離を対物レンズ4の焦点距離に位置するようにヘッド11を移動させる。
(もっと読む)
光ファイバ型センサおよび光ファイバ型センサシステム
【課題】外部への影響を及ぼさない光ファイバをセンサとして利用し、測定範囲が広く、光ファイバの破断の危険性をなくして、有効に機能させ得る光ファイバ型センサを提供する。
【解決手段】外部から負荷が付加されたときその負荷に応じて光ファイバ4が屈曲され、前記負荷が除かれたとき、前記屈曲状態から復帰させるファイバ変位手段(例えば紐状部材5とスポンジシート3との組み合わせ)を有し、前記屈曲に応じてシングルモード光ファイバ4に光伝送の損失を生じさせる構成とする。
(もっと読む)
状態検出装置
【課題】被介護者の異常を早期に発見することができるようにすること。
【解決手段】距離センサ1によって検出対象物14までの距離を検出し、検出した距離と距離センサ1の取り付け高さと距離センサ1の各センサライン0〜4の視野方向の鉛直軸からの傾き角度とから検出対象物14の高さ、幅、位置を算出し、算出結果から被介護者5の存在又は不在を検出し、被介護者5が存在する場合には被介護者5の検出位置から単位時間当たりの移動量を算出し、さらに移動量の所定時間における平均値を被介護者5の活動量として算出し、活動量が異常判定用活動量を下回る場合で且つ活動量低下時間計測タイマ7により計測した活動量低下時間が異常判定時間を上回って継続した場合に被介護者5は活動量が低下した異常状態であると判定する。
(もっと読む)
サンプル画像の検出分解能及び/又は検出輝度を改善する装置及び方法
【課題】投影画像の検出分解能及び/又は検出輝度を改善する装置及び方法を提供する。
【解決手段】遮蔽層540は、第1のアパーチャ材料530及び第2のアパーチャ材料560が挿入されたアパーチャを有し、第2のアパーチャ材料は、厚さ「t1」及び幅「d」を有する。画像光の波長に対して略透明である被覆層520(例えば、SiO2)により、遮蔽層540を被覆できる。被覆層520のアパーチャとは反対側の面は、装置又はその用途によって異なる隣接媒体510(例えば、純水、空気、真空など)にさらされており、遮蔽層は、支持層550により支持される。支持層550は、被覆層520とは反対側で遮蔽層540に動作可能に結合される。アパーチャ幅(例えば、スリット幅)を所望の値に設定し、厚さt1を変えることにより、アパーチャを通過するTEモード及びTMモードの透過率を変化させることができる。
(もっと読む)
機器位置決め装置と機器位置決め装置用回転機構
【課題】 簡単な構成で一軸はもとより複数軸の構成を実現することができる機器位置決め装置と機器位置決め装置用回転機構を提供すること。
【解決手段】 係合凹部を備えた柱体と、上記柱体の係合凹部に移動可能に係合するとともに自身の係合凹部を備えていて該係合凹部を介して任意の機器が取り付けられる移動体と、上記移動体をZ方向に移動させる移動手段と、を具備したものであれ、比較的簡単な構成で所望の機器位置決め装置を提供することができる。
(もっと読む)
鋼板溶接部オンライン検出装置及び方法
【課題】本発明は高速で移動中の鋼板にレーザビームを照射し上記鋼板から反射するレーザビームの反射率を測定し、鋼板の溶接部の位置をオンラインで検出する鋼板溶接部オンライン検出装置及び方法を提供する。このオンライン検出装置は、反射率測定手段は移動中の鋼板の表面にレーザビームを照射し、上記鋼板の表面から反射するレーザ反射光の反射率を連続して測定し、信号処理手段は溶接部で測定した反射率の変化を指標として上記鋼板溶接部を検出する。 (もっと読む)
傾斜地崩壊検知システム
【課題】傾斜地において地すべりや土砂崩れ等のいわゆる傾斜地崩壊の現象を検知する、傾斜地崩壊検知システムを提供するものである。
【解決手段】傾斜地の斜面状には所定の曲率部分を有する支柱が複数打ち込まれており、光ファイバがその支柱に沿わされ配置されている。光ファイバからは、入力された基準光に対し、外力に応じた信号光が出力されており、傾斜地に崩壊現象が発生すると支柱が動くことで光ファイバには局所的な曲げが発生し、出力される信号光の出力が変動する。光ファイバに接続された検知部では、光ファイバからの出力の変動幅が予め設定された閾値を超えた場合に、傾斜地崩壊が発生したと判定する。
(もっと読む)
塗膜厚測定装置
【課題】液溜め中に塗料を収容し、該塗料中にローラ表面の一部を浸漬した塗布ローラ4を用いて搬送中の基材の表面に塗料を塗布する方式において、表面に溝が形成されている塗布ローラ4上の塗料膜厚を判定することが難しいという問題点に対し、溝を形成した塗布ローラ上の塗料膜厚を測定して塗布厚みを制御する塗膜厚測定装置を提供することを課題とする。
【解決手段】測定ヘッドと光位置検出用センサとを、ブレードと基材との間のブレード近傍に配置し、かつ、塗布ローラの表面に形成された溝と平行に配置することで、解決することが可能となる。
(もっと読む)
実世界オブジェクト認識方法および実世界オブジェクト認識システム
【課題】 識別情報および位置情報を含む情報をサイバー世界を構成するコンピュータシステムにより認識する。
【解決手段】 実世界オブジェクトに付帯され、一意の識別情報が割り当てられた付帯素子から発せられた前記識別情報および該付帯素子の位置を表す位置情報を前記コンピュータシステムにより受信するステップと、受信した前記付帯素子の識別情報および位置情報に基づいて該付帯素子に対応する実世界オブジェクトの位置をコンピュータシステムにより特定して認識するステップとを備えている。
(もっと読む)
電子アバランシェ・フォトダイオードによるデータ・エイジの補償
干渉計からの測定信号の条件付けを含む方法。条件付けは、1つまたは複数の条件パラメータ、すなわち、条件下測定信号に対する複数の値の測定、前記条件パラメータを示す1つまたは複数の値の供給、前記条件パラメータを示す1つまたは複数の測定値に基づいて、前記条件下測定信号の各測定値のところの調整値の決定、前記調整値による前記測定信号の測定値の調整を特徴とする。 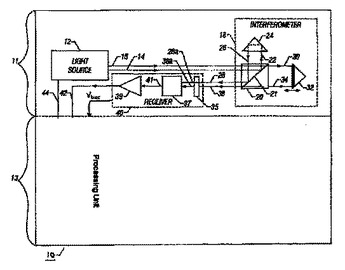 (もっと読む)
(もっと読む)
401 - 420 / 613
[ Back to top ]