
Fターム[2F065AA03]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 2次元 (1,806)
Fターム[2F065AA03]に分類される特許
141 - 160 / 1,806
露光装置及び露光方法、並びにデバイス製造方法
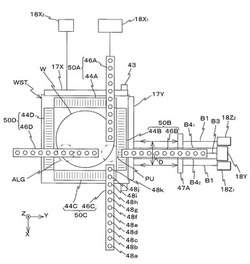
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハWを保持し所定面内で移動するウエハステージWSTと、所定面内と実質的に平行に配置される移動スケール44A〜44Dに、複数のヘッド48a〜48kを介してそれぞれ所定平面と交差する方向からビームを照射して、ウエハステージWSTの位置情報を計測するエンコーダシステムと、エンコーダシステムの計測情報に基づいてウエハステージWSTを制御する制御システムによって、複数のヘッド48a〜48kのうち移動スケール44A〜44Dと対向する複数のヘッド48a〜48kの数が変化するとともに、ウエハステージWSTの移動によって、複数のヘッド48a〜48kのうち位置情報の計測に用いられるヘッドが別のヘッドに切り換わる。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置

【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
光束の位置変化検出装置
【課題】光束の検出器への入射位置の変化が微小な場合においても感度良く光束の位置の変化を検出することが可能となる光束の位置変化検出装置を提供する。
【解決手段】光束101の位置変化検出装置であって、検出装置は、2つ以上の画素を有し、光束101の光照射量を信号値として検出する検出器102によって構成され、検出器102で検出された信号値に基づき、2つ以上の画素に入射する光束101が第1の入射位置から第2の入射位置へ変化する位置変化を検出するための演算を行う演算手段103を備え、演算手段103は、重み付け係数S/N2をIに乗じた演算値に基づいて演算するように構成されている。S:位置変化によって生じると想定される検出器102の各画素における信号値の変化量、N:光束101が第1の入射位置にあるときの検出器102の各画素で検出される信号値の標準偏差、I:検出器102の各画素で検出される信号値
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】3次元部品7を対象とする3次元画像形成において、走査光の計測対象面からの反射光の受光位置を検出する位置検出部を、受光面の計測対象面に対する傾斜角度が相異なる第1PSD25A、第2PSD25Bを有する構成とし、第1PSD25A、第2PSD25Bがそれぞれ受光した光量のうち大きい方の光量が所定の範囲を超えたとデータ処理部15aの受光量判定部によって判定されたならば、当該走査部位についての受光位置検出結果として小さい方の光量に基づく受光位置検出結果を採用して3次元認識画像を形成する。これにより、受光した光量が過大である場合に生じるノイズを排除することができ、安定した3次元認識画像を形成して正しい部品認識結果を得ることができる。
(もっと読む)
検査装置および検査方法
【課題】過度の欠陥検出を抑制することにより、不必要な欠陥修正を低減することのできる検査装置および検査方法を提供する。
【解決手段】センサ106からマスク101の光学画像を取得するし、光学画像におけるパターンの寸法と、判定の基準となる基準画像におけるパターンの寸法とを測定し、これらから第1の誤差を求める。マスク101上の光学画像と基準画像について各転写像を推定し、これらの転写像におけるパターンの寸法を測定して第2の誤差を求める。各転写像を比較し、差異が閾値を超えた場合に欠陥と判定する。欠陥と判定された箇所における第2の誤差を第1の誤差で補正する。
(もっと読む)
光学装置、スキャン方法、リソグラフィ装置及びデバイス製造方法
【課題】センサのコスト及び嵩増大、及び/又は測定の精度不良を回避又は低減する光学スキャン機構を提供する。
【解決手段】装置は、リソグラフィ基板W上のマーク202の位置を測定する。測定光学システムは、マークを放射スポットで照明する照明サブシステムと、マークによって回折した放射を検出する検出サブシステム580とを備える。傾斜ミラー562は、放射スポットを、マーク自体のスキャン運動と同期して測定光学システムの基準フレームに対して移動させて、正確な位置測定値を取得するより多くの時間を提供する。ミラー傾斜軸568は、ミラー平面と対物レンズ524の瞳面Pとの交点に沿って配置され、スキャンのアーティファクトを最小限にする。他のタイプの装置、例えば共焦顕微鏡におけるスキャンのために同じ幾何学的構成を使用できる。
(もっと読む)
欠陥分類装置
【課題】
本発明は集積回路、磁気ヘッド、磁気ディスク、太陽電池、光モジュール、発光ダイオード、液晶表示パネルなど基板上に発生した欠陥や異物の画像を撮像し、欠陥や異物を種類ごとに分類する欠陥分類装置において、撮像した画像に写っている欠陥の重要度を定量的に計算し、重要度の高い欠陥が写っている画像だけをデータベースに保存することで、ネットワーク負荷やデータベース負荷を低減する。
【解決手段】
本発明は、欠陥座標データを入力し、画像撮像プログラム501にて画像を撮像し、特徴量抽出プログラム502にて撮像した画像から欠陥の特徴量を抽出し、欠陥分類プログラム503にて欠陥を種類別に分類し、重要度予測プログラム504にて欠陥毎に重要度を計算し、画像選別プログラム506にて重要度に基づいて画像をデータベースに伝送するか否かを判定する。
(もっと読む)
検測方法及び装置
【課題】腕金以外の他の物体を誤検知することなく腕金だけを走行的に安全に検知する。
【解決手段】検測装置は、検測車に搭載された測長センサ手段を用いて電気供給用サードレールの保護板の上面に光を照射し、保護板から反射する反射光を受光することによって保護板上面における変位量を検出し、測長センサ手段によって検出された保護板上面における変位量に基づいて保護板の取付け金具である腕金の位置を検出する。防護板には腕金以外に取付けボルト等の構造物がある。この発明ではレーザ光を用いた測長センサ手段を用いて防護板上面における変位量を検出し、腕金の存在及びその位置を検出する。測長センサ手段によって検出された変位量が保護板上面から腕金の上部までの高さに対応し、その検出幅が腕金の板厚に対応するので、これらの値を腕金の高さ及び幅を示す基準値と比較して腕金のみを検出する。
(もっと読む)
ワイヤーボンドの三次元位置決め方法及び装置
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
光学式位置検出装置
【課題】検出用発光素子と受光素子との位置関係を適正化することにより、対象物体の位置を広い領域にわたって検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、X軸方向で離間する第1発光受光部15Aと第2発光受光部15Bとを順次排他的に駆動した際の駆動結果と、Y軸方向で離間する第3発光受光部15Cと第4発光受光部15Dとを順次駆動した際の駆動結果とに基づいて、対象物体ObのX座標およびY座標を検出する。複数の発光受光部15のいずれにおいても、検出用発光素子12と受光素子30とが隣り合う位置に配置され、対象物体Obで反射して第1受光素子30Aに到達する光は、対象物体Obにおいて第1検出用発光素子12Aおよび第1受光素子30Aが位置する側に向けて反射した光である。このため、第1受光素子30Aの受光強度は、対象物体Obの位置によって単調に変化する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10の検出対象空間10Rは、第1受発光ユニット15Aおよび第2受発光ユニット15Bによる検出対象空間10Rabと、第3受発光ユニット15Cおよび第4受発光ユニット15Dによる検出対象空間10Rcdとに分割されている。第1受発光ユニット15Aと第4受発光ユニット15DとはX軸方向で離間し、第2受発光ユニット15Bおよび第3受発光ユニット15Cは、Y軸方向の一方の側に配置されている。第1受発光ユニット15Aおよび第4受発光ユニット15Dは、X軸方向において、第2受発光ユニット15Bおよび第3受発光ユニット15Cより外側に配置されている。
(もっと読む)
検査装置及び欠陥検査方法
【課題】炭化珪素基板又は炭化珪素基板に形成されたエピタキシャル層に存在する欠陥を検出し、検出された欠陥を分類する検査装置を実現する。
【解決手段】本発明では、微分干渉光学系を含む走査装置を用いて、炭化珪素基板の表面又はエピタキシャル層の表面を走査する。炭化珪素基板からの反射光はリニアイメージセンサ(23)により受光され、その出力信号は信号処理装置(11)に供給する。信号処理装置は、炭化珪素基板表面の微分干渉画像を形成する2次元画像生成手段(32)を有する。基板表面の微分干渉画像は欠陥検出手段(34)に供給されて欠陥が検出される。検出された欠陥の画像は、欠陥分類手段(36)に供給され、欠陥画像の形状及び輝度分布に基づいて欠陥が分類される。欠陥分類手段は、特有の形状を有する欠陥像を識別する第1の分類手段(50)と、点状の低輝度欠陥像や明暗輝度の欠陥像を識別する第2の分類手段(51)とを有する。
(もっと読む)
移動体駆動方法
【課題】露光装置で、複数のヘッドを含むエンコーダシステムを用いてウエハステージの位置を管理することが出来る移動体駆動方法を提供する。
【解決手段】制御装置により、エンコーダシステムのXエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダEnc1,Enc2及びEnc3を用いてステージWSTの移動面内の位置情報が計測され、該位置情報の計測結果と該位置情報の計測に用いられたヘッド(エンコーダ)Enc1,Enc2及びEnc3の移動面内での位置情報(p1,q1)、(p2,q2)及び(p3,q3)とに基づいて、XY面内でステージWSTが駆動される。これにより、複数のヘッドを含むエンコーダシステムを用いてステージWSTの移動中に制御に用いるヘッド(エンコーダ)を切り換えながら、ステージの移動を精度良く制御することが可能になる。
(もっと読む)
画像処理装置および画像処理システム
【課題】撮像装置に対する撮像指示を発生してから実際に撮像が行われるまでにタイムラグが存在する場合であっても、正確にトラッキング処理を行うことのできる視覚センサを提供する。
【解決手段】画像処理装置は、搬送装置の搬送経路における移動量を示す信号を受付けるインターフェイスと、搬送経路において撮像部の撮像範囲より下流側に配置されるとともにワークを取り扱う移動機械、を制御するための制御装置と通信するためのインターフェイスと、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する手段と、制御装置との間で搬送経路における移動量を同期して保持する手段と、撮像指示に応答して撮像部による撮像を開始する手段と、位置情報と当該位置情報の取得に用いた画像を撮像したときの移動量とを制御装置へ送信する手段とを含む。
(もっと読む)
座標入力装置
【課題】複数の要素によって構成される座標入力装置において、各要素をより正確な位置関係で配置することを容易とする。
【解決手段】入射光を、入射光の入射方向へと反射する再帰反射部材が配置されたフレームと、再帰反射部材へと光を投光する投光手段、及び投光手段によって投光され再帰反射部材によって反射された光を受光する受光手段を備えるセンサユニットと、を備え、フレームとセンサユニットとが座標入力領域の周囲に所定の位置関係となるように配置された際に、座標入力領域に対する入力位置を検出する座標入力装置。フレームは、フレームとセンサユニットとが所定の位置関係となるように配置された際に、センサユニットの投光手段から投光された光を、センサユニットの受光手段へと反射するように配置された鏡面部材を備える。
(もっと読む)
マーク検出装置、基板検査装置およびマーク検出方法
【課題】透明基板に設けられたフィデューシャルマークを確実かつ容易に検出する。
【解決手段】フィデューシャルマークMが設けられた検査対象基板10の一方の面に光を照射すると共に、基板10の一方の面を撮像した撮像データに基づいてマークMを検出する際に、緑色、青色および黒色のうちのいずれかの色で形成された有色半透明シート9bを基板10の他方の面に接するように配設すると共に、少なくともシート9bに対する接触面が黒色および緑色のいずれかの色で形成された有色不透明シート9aをシート9bにおける基板10に対する接触面の裏面に接するように配設した状態において、他方の面がシート9bに接するように配設した基板10の一方の面にLED光源21から赤色光L1を照射すると共に、単色画像データを出力可能な撮像部22によって基板10の一方の面を撮像し、撮像部22から出力された単色画像データに基づいてマークMを検出する。
(もっと読む)
屋内用自律走行移動体の自己位置測定方法及び装置
【課題】人間がいるエリアを自律走行する場合であっても、屋内用の自律走行移動体の自己位置を、光源の追加無しに、同じエリアの人間に視覚的な違和感を持たせにくく、かつ、周辺の環境状態の影響を受けにくい形態で測定すること。
【解決手段】走行台車1に搭載したビデオカメラ4aの撮影画像中に、天井の複数の照明器3のうち最低1個が常に入るようにした。そして、各照明器3は、自己のユニークなID番号のパターンで変調した照明光を発光し、ビデオカメラ4aで撮影した照明器3とその設置位置を、受光センサ4bが受光したその照明器3からの照明光を復調して得たID番号に基づいて照合する。照合した照明器3の設置位置と、ビデオカメラ4aの撮影画像から計算したビデオカメラ4a乃至走行台車1からの照明器3の相対位置とに基づいて、走行台車1の自己位置を測定する。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
変位測定装置、変位測定方法、光学用部材成形用金型の製造方法及び光学用部材
【課題】レーザ光の光量安定性、光量分布、光軸ぶれによる測定誤差を低減することのできる変位測定装置及び変位測定方法を提供する。
【解決手段】ビームスプリッタ3により、レーザ光源1から出射されたレーザ光を被測定物4に向かう第1分割レーザ光2a及び第2分割レーザ光2bに分割すると共に、第2受光素子6bにより第2分割レーザ光2bを受光する。そして、第2受光素子6bを、第2受光素子6bに入射する第2分割レーザ光2bの光量の割合と第1受光素子6aに入射する第1分割レーザ光2aの光量の割合とが一致する位置に配置し、位置演算器8は、第1受光素子6aの出力及び第2受光素子6bの出力の差に基づいてレーザ光源1に対する被測定物4の変位を演算する。
(もっと読む)
光学式検出装置、電子機器及び投射型表示装置
【課題】広い検出エリアにおいて検出精度の均一化ができる光学式検出装置、電子機器及び投射型表示装置等を提供すること。
【解決手段】光学式検出装置は、照射光LTを出射する照射部EUと、検出エリアRDETに存在する対象物OBにより照射光LTが反射することによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置検出情報を検出する検出部110とを含む。照射部EUは、検出エリアRDETが設定される対象面SOBに対して斜め方向となる第1の面SF1と、対象面SOBに対して斜め方向となり、且つ、第1の面SF1よりも対象面SOBとの成す角が大きい第2の面SF2とにより規定される照射範囲に、第1の面SF1に沿う方向において第1の強度であり、第2の面SF2に沿う方向において第1の強度よりも強度が低い第2の強度である照射光LTを出射する。
(もっと読む)
141 - 160 / 1,806
[ Back to top ]