
Fターム[2F065AA03]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 2次元 (1,806)
Fターム[2F065AA03]に分類される特許
161 - 180 / 1,806
真直度測定装置
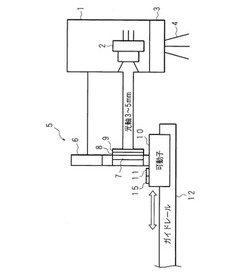
【課題】ストレートエッジと同等の精度で真直度の測定、調整ができる小型軽量安価な真直度測定装置の提供。
【解決手段】光位置センサ7が、測定対象12に沿って摺動させられつつ、光ビーム出力部1からの光ビームを受光した平面上の位置を検出することにより、測定対象12の真直度を測定する真直度測定装置。光ビーム出力部1及び光位置センサ7間の距離を距離センサ6が測定し、受光する平面上の任意の位置を基準位置として受付け、校正動作時に、基準位置及び光位置センサ7が検出した位置の差を算出し、算出した差を、位置の検出時に距離センサ6が測定した距離と共に記憶しておき、測定動作時に、基準位置及び光位置センサ7が検出した位置の差を算出し、算出した差から、位置の検出時に測定した距離に対応して記憶している差を差引いた結果を距離と共に表示部11に表示する構成である。
(もっと読む)
コレット位置検出方法及び装置

【課題】簡便に且つ精度上の制限を受け難い状態でコレットの位置を検出し得るコレット位置検出方法及び装置を提供する。
【解決手段】基準座標系において、半導体チップTのピックアップステージ4とボンディングステージ5との間の所定の座標に光センサ9を配置し、一方向にコレット80を移動させながら、コレットまたはその装着部の縁部を光センサ9で検知することにより、2つの縁部の中心である第一中央位置の座標値を検出し、一方向に直交する方向に同様の移動及び検知を行なって2つの縁部の中心である第二中央位置の座標値を検出し、第一中央位置及び第二中央位置からコレット中心の検出座標値を求め、該検出座標値に基づいてコレットの設定座標値を補正することを特徴とするコレット位置検出方法及び該方法を実施するための検出装置。
(もっと読む)
跳躍動作測定装置及び跳躍動作測定方法
【課題】被験者の跳躍動作をより好適に測定することができる跳躍動作測定装置を提供する。
【解決手段】カメラ20によって撮像された画像データに基づいて、測定部13が、カウンタームーブメントジャンプ動作、スクワットジャンプ動作、ホッピングジャンプ動作、及び立ち上がり動作の中から測定動作選択部12によって選択された測定対象の跳躍動作の測定を行い、情報出力部15が、測定結果に基づいた情報を出力する。また、情報提供部14が、選択された跳躍動作となるように、被験者Aに対して、カメラ20によって撮像された画像データに基づいた情報提供を、モニタ30を通じて行う。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
測定装置、測定方法及びステージ装置
【課題】置の大型化を招くことなく移動ステージの位置検出を可能とする測定装置を提供する。
【解決手段】第1軸方向に沿って可動体に第1ビームを出射し、可動体で反射した第1ビームが第1光路で進む前記第1光学部材と、第1軸方向に沿って可動体に第2ビームを出射し、可動体で反射した第2ビームが第2光路で進む第2光学部材と、第1軸方向に沿って可動体に第3ビームを出射し、可動体で反射した第3ビームが第3光路で進む第3光学部材と、第1光路を進んだ第1ビーム、及び第2光路を進んだ第2ビームが互いに干渉する干渉計と、干渉計での干渉に基づいて、第3軸方向における可動体の位置情報を得る算出装置とを備え、第1軸方向に沿って可動体に向かう第3ビームの進路は、第3軸方向について、第1光路の進路と第2光路の進路との間に位置する。
(もっと読む)
3次元データと2次元データの統合方法及びこれを用いた見守りシステム、監視システム
【課題】距離画像データ等の3次元データと2次元画像データとの対応付け、距離画像データと2次元画像データを相補的に用いることにより柔軟で信頼性の高い認識結果が得られる、3次元データと2次元画像データの統合方法およびそれを用いた頑健な監視・見守りシステムを提供する。
【解決手段】システムは、2次元データを取得する2次元データ取得ステップと、3次元データを取得する3次元データ取得ステップと、上記2次元データと前記3次元データの位置を対応付ける対応付けステップと、上記対応付けステップで対応付けた結果に基づいて上記3次元データを2次元データ上に重畳する重畳ステップとを備える。
(もっと読む)
光学式位置検出装置および光学式位置検出方法
【課題】温度センサ等を追加しなくても、環境温度の変化に応じた適正な補正を行うことのできる光学式位置検出装置および光学式位置検出方法を提供すること。
【解決手段】光学式位置検出装置10および光学式位置検出方法において、補正条件決定部64は、対象物体Obが存在しないデフォルト状態により位置検出部50で検出されたデフォルト二次元座標データの第1座標値と第2座標値との比較結果に基づいて補正条件を決定し、位置検出部50により対象物体Obの二次元座標データを検出する際、補正条件に対応する補正が行われる。従って、環境温度を直接、測定しなくても、温度補正を行うことができるので、検出用光源12からの検出光の出射強度が環境温度によって変化した場合でも、対象物体Obの二次元座標データを精度よく検出することができる。
(もっと読む)
移動物体検出装置
【課題】レーダを用いることなく、車両に搭載された撮影手段によって撮影された画像から、車両の進行方向を横切る移動物体を精度良く検出すること。
【解決手段】車両の進行方向に対応する、画像の無限遠点とビデオカメラ10の焦点とを結ぶ線分と、車両から見た移動物体の実際の動きベクトルの向きに対応する、各特徴点の消失点とビデオカメラ10の焦点とを結ぶ線分がなす角度を、車両の進行方向に対する各特徴点の相対的進入角度として算出する。そして、算出した各特徴点の相対的進入角度が所定の閾値θth以上であるかにより、移動物体が、車両の進路を横切る進路横断移動物体であるか否かを判定する。
(もっと読む)
光学式タッチパネル及び光学式タッチパネルの製造方法
【課題】部品点数及び製造工程数を削減する。
【解決手段】各々所定方向に配列された複数の発光素子18を備えた一対の発光素子列20,22と、各々所定方向に配列された複数の受光素子24を備え、一方が一対の発光素子列20,22の一方から発光された赤外線IR1を受光し、かつ他方が一対の発光素子列20,22の他方から発光された赤外線IR2を受光する一対の受光素子列26,28と、一対の発光素子列20,22の各々の発光素子18に接続された発光素子用配線30と、一対の受光素子列26,28の各々の受光素子24に接続された受光素子用配線32と、を絶縁性を有する透明な単一の基板12の一方の主面に設けた。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
従来技術によれば,試料に熱ダメージを与えることなく,短時間で高感度に欠陥検出・寸法算出することが困難であった。
【解決手段】
被検査対象物である試料の表面の領域を所定の照明条件にて照明する照明工程と、該試料を並進および回転させる試料走査工程と、該試料の照明領域から複数の方向に散乱する複数の散乱光のそれぞれを、前記試料走査工程における走査方向および該走査方向と概略直交する方向の各々について複数画素に分割して検出する散乱光検出工程と、前記散乱光検出工程において検出された複数の散乱光のそれぞれについて、該試料の概略同一領域から概略同一方向に散乱した散乱光を加算処理し、該加算処理した散乱光に基づき欠陥の有無を判定し、該判定された欠陥に対応する複数の散乱光のうち少なくとも一の散乱光を用いて該判定された欠陥の寸法を算出する処理工程と、を備える欠陥検査方法である。
(もっと読む)
ひずみ測定装置およびひずみ測定方法
【課題】本発明は、分解能を維持しつつ測定範囲をより広げ得るひずみ測定装置およびひずみ測定方法を提供する。
【解決手段】本発明では、複数のマークMを備える試験体SMに外力を作用させる前後における試験体SMの画像が、外力作用前画像および外力作用後画像として第1カメラ装置11によって得られ、追跡マークMcとされる、前記複数のマークMのうちの1つのマークMの位置および所定の基準位置の間の基準距離と、前記外力作用前画像における追跡マークMcの位置と、前記外力作用後画像における追跡マークMcの位置とに基づいて、試験体SMの伸縮率が求められる。ここで、追跡マークMcが外力作用後画像での所定の端部領域内に位置する場合には、複数のマークMのうちの前記追跡マークMcと異なって前記端部領域外に位置するマークMを新たな追跡マークMcとするものである。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
インプリント装置、そのモールド及び物品の製造方法
【課題】 ショット領域間の相対位置の計測を容易に行いうるインプリント装置を提供する。
【解決手段】 インプリント装置は、基準マークが形成されたモールドを保持する支持体と、各ショット領域に第1マーク及び第2マークが形成された基板を保持する基板ステージと、前記各ショット領域に形成された前記第1マーク及び前記第2マークと前記モールドに形成された前記基準マークとを検出することによって前記各ショット領域間の相対位置を計測する検出器とを備える。前記検出器は、隣接しあう2つのショット領域のそれぞれに形成された隣接しあう前記第1マーク及び前記第2マークそれぞれの前記基準マークに対する位置を検出することによって、隣接しあう前記2つのショット領域間の相対位置を検出する。
(もっと読む)
内燃機関の変位計測装置
【課題】車両に搭載された内燃機関の変位量を容易にして精度良く計測可能な内燃機関の変位計測装置を提供する。
【解決手段】変位測定手段による第1被測定体と第2被測定体の測定結果に基づいて内燃機関の変位量を算出する変位量算出手段を備え、該変位量算出手段は、第1被測定体の第1測定面上に変位測定手段による測定点を含んで形成される第1直線部分l1、l'1の延長線と第2被測定体の第2測定面上に変位測定手段による測定点を含んで形成される第2直線部分m1、m'1の延長線との交点P(X、Z)、P'(X'、Z')を求め、該交点の第1直線部分と第2直線部分とにより形成される基準平面上での変位を演算することで内燃機関の変位量を算出する。
(もっと読む)
ファウル検出装置
【課題】ファウルポール近傍のファウル領域に飛翔した打球を確実に検出して表示する。
【解決手段】野球場のファウルラインがフェンス24と接する地点に設置されたファウルポール7に隣接したファウル領域に設けた複数の光ビームを投受光するビームセンサ2で打球がファウルポール7の近傍のファウル領域に飛んだことを検出して確認表示装置4に打球がファウルであることを表示させて、ファウルポール7の近傍に飛んだ打球がフェアであるかファウルであるかを正確にかつ容易に確認する。
(もっと読む)
ステージ装置、露光装置及びデバイスの製造方法
【課題】テーブルの位置決めに有利なステージ装置を提供する。
【解決手段】ベース部と、XY平面に沿って移動可能なテーブルと、Y軸方向に沿った前記第1の端面の位置を計測する第1のY軸干渉計222と、前記Y軸方向に沿った第2の計測光路を有する第2の端面の位置を計測する第2のY軸干渉計224と、前記第1のY軸干渉計及び前記第2のY軸干渉計から前記XYZ座標系のX軸方向に離間して、且つ、前記Y軸方向に沿った第3の計測光路を有する第3のY軸干渉計228と、前記第1のY軸干渉計の計測値、前記第2のY軸干渉計の計測値及び前記第3のY軸干渉計の計測値に基づいて前記テーブルの変形量を求め、前記変形量に基づいて目標位置を補正した補正目標位置を求め、前記第1のY軸干渉計の計測値と前記第2のY軸干渉計の計測値から求まる前記テーブルの位置が前記補正目標位置に位置するように前記テーブルを位置決めする制御部とを有する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が傾いている場合や対象物体のサイズが部分によって相違している場合でも、対象物体の位置を精度よく検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、検出用光源12から検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出器30で受光して対象物体Obの位置を検出する。また、入射光選択部20は、検出対象空間10R(空間10R1、10R2、10R3)のうち、一部の空間についてはこの一部の空間から光検出器30への反射光L3の入射が許容された選択状態とし、他の空間については他の空間から光検出器30への反射光の入射が阻止された非選択状態とする。また、入射光選択部20は、選択状態とされる空間および非選択状態とされる空間をZ軸方向で切り換える、
(もっと読む)
角度測定装置、角度の測定方法、及びプログラム
【課題】従来技術と比較して、簡易に角度を測定する。
【解決手段】ビデオカメラ12によって取得された複数個の画像データに基づいて算出された指定時刻から単位時間経過後の複数のマーカの各々の三次元位置、初期距離、及び初期角度に基づいて算出された各二次元移動量と、追尾結果により得られる指定時刻から単位時間経過後の前記複数のマーカの各々の前記画像上での各二次元移動量との差の二乗和、及び複数のマーカの各々の画像上での各二次元位置と、追尾結果により得られる指定時刻から単位時間経過後の複数のマーカの各々の画像上での各二次元位置との差の二乗和が最小となるように、初期移動量、初期座標、及び初期角度を調整した場合における調整後の初期角度を測定対象平面の角度として測定する。
(もっと読む)
可搬型データ取得装置、および、実装精度評価システム
【課題】部品実装機を評価するためのデータを軽量な装置で正確に取得する。
【解決手段】部品実装機により部品が実装された評価用基板200を用い、前記部品実装機の実装精度を評価するためのデータを取得する可搬型データ取得装置100であって、デジタルカメラ101と、評価用基板200を保持し、光を拡散状に透過させる保持板102と、デジタルカメラ101と保持板102とを一定の距離を維持して保持する剛性を備えた基体103と、基体103に保持板102が取り付けられた状態において、保持板102に対しデジタルカメラ101と反対側に取り付けられる、複数の発光源を有する照明手段104とを備える。
(もっと読む)
161 - 180 / 1,806
[ Back to top ]