
Fターム[2F065AA06]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸方向;距離 (1,861)
Fターム[2F065AA06]に分類される特許
161 - 180 / 1,861
ワイヤーボンドの三次元位置決め方法及び装置
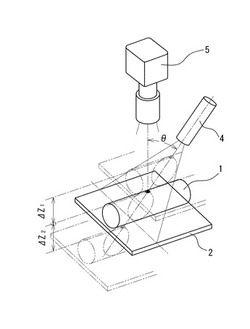
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
物体検出ユニット

【課題】物体の誤検出を抑えたい領域と、物体の見逃しを抑えたい領域とが、混在する検出空間に対して、領域毎に、その領域に合わせた物体の検出が行える物体検出ユニットを提供する。
【解決手段】発光部31を発光させて入出口の幅方向に検出波を照射し、受光部32で反射波を検出する。記憶部5、物体の仮検出に用いる受光部32の受光光量の下限を設定する仮検出レベル、および仮検出した物体の本検出に用いる受光部32の受光光量であって、仮検出した物体までの距離に応じて下限を設定する本検出レベルを記憶する。測距部3は、受光部32で検出した反射波の受光光量が、記憶部5に記憶している仮検出レベルを超えているときに、物体を仮検出するとともに、この仮検出した物体までの距離を算出する。制御部2は、本検出レベルを用いて、仮検出した物体が物体であるかどうかを判定する。
(もっと読む)
クロマティック共焦点ポイントセンサ光学ペン
【課題】対象表面までの距離測定用で改善された範囲対分解能比を持った小型のクロマティック共焦点ポイントセンサ光学ペンを提供すること。
【解決手段】光学ペン220は測定範囲対分解能比を拡張する多段の光学的構造を含み、該光学的構造は少なくとも第一および最後の軸方向分散合焦要素250A,250Bを含む。軸方向合焦要素は光学的に結合して光学ペン全体での軸方向色分散量の増加に貢献する。第一の軸方向分散合焦要素は光源放射光を受けてこれを多段の光学的構造内の第一の焦点領域に合焦する。最後の軸方向分散合焦要素は多段の光学的構造内の最後の焦点領域から放射光を受けて測定ビームMBを出力する。中間の焦点領域を形成する中間合焦要素を設けてもよい。このような光学的構造によって今までにない拡張された測定範囲R2、小さいレンズ径、および高い開口数を結合した光学ペンを提供できる。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
位置検出装置
【課題】パネル上に穴加工の基準となる目標点の座標を短時間で検出することが可能な位置検出装置を提供する。
【解決手段】本発明に係る位置検出装置1は、被測定面と交差する方向の高さを有する基準ボルトBの頭部Btに直線光を照射し、その反射光から基準ボルトBの頭部Btまでの距離を測定する光学センサ2と、直線光を照射方向と交差する2つの方向へ移動させる回転支軸3と、光学センサ2により所定の値の距離が測定された時点の回転支軸3の移動位置を検出する位置センサと、この位置センサから得られた複数の位置データから2つの移動方向により規定される平面において、基準ボルトBの略中心にあるボルト穴Pbの中心の座標を演算する演算部と、を有するものである。
(もっと読む)
表面形状計測装置、及び表面形状計測方法
【課題】計測対象物の三次元形状を容易に、且つリアルタイムに得ることができる表面形状計測装置、及び表面形状計測方法を提供する。
【解決手段】道路8の表面にレーザビーム9を走査させて、道路8の表面に照射したレーザビーム9の方位毎の測距データを出力する測域センサ1と、レーザビーム9の投光面の一部を含んだ道路8の表面を撮像するカメラ3と、測域センサ1、及びカメラ3を道路8の表面に沿って車輪7を回転させて移動させる走行台車5と、走行台車5により測域センサ1、及びカメラ3を移動させた時に測域センサ1から得られた測距データを演算処理してz軸方向の位置座標を求め、カメラ3から得られた画像データを演算処理してx軸方向、並びにy軸方向の位置座標を求める位置座標検出手段と、位置座標検出手段により求められた各軸方向の位置座標に基づいて道路8の三次元形状を演算するPC4と、を備えて構成されている。
(もっと読む)
圧電特性の測定装置および測定方法
【課題】光学式測位法を用いて圧電特性を測定する際に、照射光に対する反射光の散乱を防ぐことが容易で、圧電変形や圧電特性の測定精度が従来よりも高い測定装置および測定方法の提供を図る。
【解決手段】測定装置1はファイバーヘッド3、可動反射板51、試料保持構造10、測光部4、および、演算制御部5を備える。ファイバーヘッド3は照射光を照射し、その照射光の反射光を受光する。試料保持構造10は、圧電体試料50の下端部近傍を固定して圧電体試料50の上端部側を自立させる。可動反射板51は、下面が圧電体試料50の上端部に接触するように配置され、ファイバーヘッド3の照射光を反射する。演算制御部5は、圧電体試料50の圧電変形による可動反射板51の変位を検出して圧電体試料50の圧電特性を測定する。
(もっと読む)
厚さ測定装置
【課題】C形フレームの機械的なドリフトによる距離検出器間の距離の変位を瞬時に測定し、厚さ測定誤差を補正する厚さ測定装置を提供することを目的とする。
【解決手段】C形フレーム3の腕部に設けられる第1の距離検出器1と第2の距離検出器2との出力から厚さを求める厚さ測定装置であって、C形フレーム3の腕部の下部に設けられ、腕部空間内に、レーザビームの光路にハーフミラーを設けて、当該ハーフミラーの反射した第1のレーザビームの位置の変化を検出する第1のビーム位置変位検出器4aと、当該第1のビーム位置検出器の出力から第1のレーザビームの入射角度の変位と記第1の距離検出器と第2の距離検出器間の距離検出器間の距離の変位と、を求める第1のビーム位置変位処理部4bとを備え、厚さ測定値を自動的に補正するようにした厚さ測定装置。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】単純な形状に限らず認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づいて、認識対象物または3次元モデルを対称的に配置した2つの姿勢候補を示す姿勢候補情報を生成する姿勢候補情報生成部234と、認識対象物の姿勢候補情報と3次元モデル情報とに基づいて、または、認識対象情報と3次元モデルの姿勢候補情報とに基づいて認識対象物の位置および姿勢を特定する認識対象物特定部236とを備える。
(もっと読む)
真直度測定装置
【課題】ストレートエッジと同等の精度で真直度の測定、調整ができる小型軽量安価な真直度測定装置の提供。
【解決手段】光位置センサ7が、測定対象12に沿って摺動させられつつ、光ビーム出力部1からの光ビームを受光した平面上の位置を検出することにより、測定対象12の真直度を測定する真直度測定装置。光ビーム出力部1及び光位置センサ7間の距離を距離センサ6が測定し、受光する平面上の任意の位置を基準位置として受付け、校正動作時に、基準位置及び光位置センサ7が検出した位置の差を算出し、算出した差を、位置の検出時に距離センサ6が測定した距離と共に記憶しておき、測定動作時に、基準位置及び光位置センサ7が検出した位置の差を算出し、算出した差から、位置の検出時に測定した距離に対応して記憶している差を差引いた結果を距離と共に表示部11に表示する構成である。
(もっと読む)
変位検出装置、露光装置、及びデバイス製造方法
【課題】変位量への換算を迅速に処理する。
【解決手段】 対物レンズ18は、光源13が発した光束を被検面23a上に微小スポットとして投射する。シリンドリカルレンズユニット21は、曲率半径の異なる2つのシリンドリカルレンズ30,31をもっており、それぞれに被検面23aで反射した反射光束に異なる量の非点収差を与える。受光センサ19は、非点収差が与えられた反射光束を入射させて受光パターンに応じた出力変化が得られるように受光面が複数に分割されている。信号処理部24は、受光面から得られる出力信号に基づいて被検面23aの変位を検出する。選択部33は、被検面23aの検出範囲に応じて、いずれか一方のシリンドリカルレンズ30,31を光路上にセットするように移動機構22を制御する。
(もっと読む)
炉壁形状測定装置、炉壁形状測定システム、および炉壁形状測定方法
【課題】炉壁表面の凹凸形状を測定するためのレーザ光と炉壁の自発光とを同時に取得しつつもレーザ光と自発光とが干渉せず、炉壁表面に対し垂直方向の計測可能範囲およびレーザ光の照射範囲を広くする。
【解決手段】スリット状の窓2を有する断熱性保護箱3の内部に配置された、スリット状のレーザ光を射出するスリットレーザ光源4と、レーザ光を反射して窓2を介して炉壁表面へレーザ光を照射するレーザ光用ミラー5と、窓2を介して断熱性保護箱3の内部に入射する、レーザ光の照射による炉壁表面の反射光および炉壁表面が発する自発光を反射する撮像用ミラー6と、撮像用ミラー6から反射された自発光と反射光とを光学フィルタ7を介して撮像する撮像装置8とを備える。
(もっと読む)
変位検出装置、露光装置、及びデバイス製造方法
【課題】うねりによる影響を極力無くして被検面の変位量を検出する。
【解決手段】 対物レンズ18は、光源13が発した光束を被検面23a上に微小なビーム光として投射する。シリンドリカルレンズ21は、被検面23aで反射した反射光束に非点収差を与える。受光センサ19は、非点収差が与えられた反射光束を入射させて受光パターンに応じた出力変化が得られるように受光面が複数に分割されている。信号処理部26は、受光面から得られる変位信号に基づいて被検面23aの変位を検出する。表面すねり補正部28は、変位信号に基づいて表面のうねりの周期ピッチを求め、その時点の被検面23a上のビーム径が周期ピッチよりも大きくなるように集光レンズ20と受光面19aとの間隔を変え、これに連動して対物レンズ18を移動する。
(もっと読む)
測定装置、測定方法及びステージ装置
【課題】置の大型化を招くことなく移動ステージの位置検出を可能とする測定装置を提供する。
【解決手段】第1軸方向に沿って可動体に第1ビームを出射し、可動体で反射した第1ビームが第1光路で進む前記第1光学部材と、第1軸方向に沿って可動体に第2ビームを出射し、可動体で反射した第2ビームが第2光路で進む第2光学部材と、第1軸方向に沿って可動体に第3ビームを出射し、可動体で反射した第3ビームが第3光路で進む第3光学部材と、第1光路を進んだ第1ビーム、及び第2光路を進んだ第2ビームが互いに干渉する干渉計と、干渉計での干渉に基づいて、第3軸方向における可動体の位置情報を得る算出装置とを備え、第1軸方向に沿って可動体に向かう第3ビームの進路は、第3軸方向について、第1光路の進路と第2光路の進路との間に位置する。
(もっと読む)
光学式位置検出装置および位置検出システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および位置検出システムを提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12は、検出光L2の出射強度が出射角度範囲の一方側から他方側に向かって減少する第1点灯動作と、検出光L2の出射強度が出射角度範囲の他方側から一方側に向かって減少する第2点灯動作とを行う。従って、第1点灯動作時における受光部13の受光強度と第2点灯動作時における受光部13の受光強度との比較結果に基づいて検出用光源部12に対する対象物体Obの角度位置(角度θ)を検出でき、検出用光源部12が検出光L2を出射した際の受光部13の受光強度に基づいて検出用光源部12から対象物体Obまでの距離rを検出できる。
(もっと読む)
鉄道車両アタック角測定装置および方法
【課題】軌間外の建築限界を支障しない箇所に1つのセンサを設置するだけで車輪のレールに対するアタック角を測定することができ、複数のセンサを用いることや、高い精度でのゼロ点調整が不要な、鉄道車両アタック角測定装置および方法を提供する。
【解決手段】レールを走行する鉄道車両の車輪Wが通過する位置が測定範囲となるように設置され、測定点を通過する前記車輪Wまでの距離を連続的に測定するセンサ部12と、前記センサ部12による測定結果を受信して解析する処理部14と、を有し、前記処理部14は、前記センサ部12の測定結果から、前記車両の走行速度と、所定時間における車輪Wまでの距離の変化量を算出し、前記走行速度に前記所定時間を乗じた値と、前記所定時間における車輪Wまでの距離の変化量とから、その車輪の前記レールに対するアタック角を算出する。
(もっと読む)
移動体駆動システム及び移動体駆動方法、パターン形成装置及び方法、露光装置及び方法、デバイス製造方法、並びに決定方法
【課題】エンコーダで位置を測定しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハテーブルWTBのY軸方向の位置情報を計測するエンコーダ64の計測値とその計測時に干渉計16,43A及び43Bによって計測されるウエハテーブルWTBの非計測方向(例えば、Z、θz及びθx方向)の位置情報に応じた既知の補正情報とに基づいて、ウエハテーブルがY軸方向に駆動される。すなわち、非計測方向へのヘッドとスケールの相対変位に起因するエンコーダの計測誤差を補正する補正情報により補正されたエンコーダの計測値に基づいて移動体がY軸方向に駆動される。従って、ヘッドとスケールの間の計測したい方向(計測方向)以外の相対運動に影響を受けることなく、エンコーダで位置を計測しつつ、ウエハテーブル(移動体)を所望の方向へ精度良く駆動することが可能になる。
(もっと読む)
光学式位置検出装置および光学式位置検出方法
【課題】温度センサ等を追加しなくても、環境温度の変化に応じた適正な補正を行うことのできる光学式位置検出装置および光学式位置検出方法を提供すること。
【解決手段】光学式位置検出装置10および光学式位置検出方法において、補正条件決定部64は、対象物体Obが存在しないデフォルト状態により位置検出部50で検出されたデフォルト二次元座標データの第1座標値と第2座標値との比較結果に基づいて補正条件を決定し、位置検出部50により対象物体Obの二次元座標データを検出する際、補正条件に対応する補正が行われる。従って、環境温度を直接、測定しなくても、温度補正を行うことができるので、検出用光源12からの検出光の出射強度が環境温度によって変化した場合でも、対象物体Obの二次元座標データを精度よく検出することができる。
(もっと読む)
表面欠陥検出・指示システムおよび表面処理の伴う加工物の製造方法
【課題】加工物の表面欠陥を自動的に検出するとともに、作業者に対して安全な環境を維持しつつ、その表面欠陥の位置を正確かつすばやく明示し、その後の表面欠陥の再加工を円滑に行わせることのできる表面欠陥検出・指示システムおよび表面処理の伴う加工物の製造方法を提供する。
【解決手段】ロボットの動作範囲内に表面処理された加工物を置いて、その加工物の表面をスキャンさせ、表面欠陥があったときには、その欠陥位置を特定する情報を記憶させておき、そのスキャン後に、加工物をロボットの動作範囲外におき、欠陥位置情報をもとに指示器がその表面欠陥の位置を光で照射することのほか、その照射した光が指し示す加工物の表面部位に対して再表面処理を行う。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測方法
【課題】画像と3次元形状モデルの誤対応を減らし、高速でロバストな物体の位置及び姿勢の計測を実現する。
【解決手段】物体の3次元形状モデルを保存する保存部110と、物体の濃淡画像を入力する濃淡画像入力部130と、物体の距離画像を入力する距離画像入力部150と、位置姿勢計測装置100に対する物体の概略の位置及び姿勢を入力する概略位置姿勢入力部120と、濃淡画像の情報を利用して、物体の概略の位置及び姿勢をもとに物体の第1の位置及び姿勢を算出するとともに、第1の位置及び姿勢を用いて算出される3次元形状モデルの画像面上での投影位置をもとに、距離画像から得られる3次元点群または当該3次元点群及び濃淡画像の画像特徴群と、3次元形状モデルとの対応付けを行い、当該対応付け結果に基づいて第2の位置及び姿勢を算出する位置姿勢算出部160を備える。
(もっと読む)
161 - 180 / 1,861
[ Back to top ]