
Fターム[2F065AA06]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸方向;距離 (1,861)
Fターム[2F065AA06]に分類される特許
101 - 120 / 1,861
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
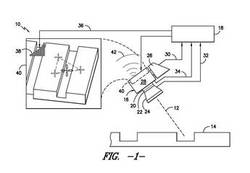
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
カメラシステムおよび画像生成方法

【課題】被検物が撮像画像上を移動した場合でも、良好な検波処理画像を得ることができるカメラシステムを提供すること。
【解決手段】所定周期で点灯消灯するパルス光を被検物に照射し、前記パルス光が照射される領域を含む領域を繰り返し撮像し、撮像された画像の画像信号に対して、画素ごとに同期検波処理を行なって、照射される前記パルス光の点灯消灯のタイミングに同期した検波処理画像を生成する際において、撮像画像上における前記被検物の移動速度に基づいて、画像信号の読出し画素位置を変更するとともに、単位画素未満の移動量が検出された場合には、検出した単位画素未満の移動量に基づいて、読出し画素位置を変更した画像信号の信号出力を補正するカメラシステム。
(もっと読む)
プロペラレーシング監視装置
【課題】船舶における操船性の向上が図れるプロペラレーシング監視装置を得る。
【解決手段】船体10に設置され、水面11にレーザ光1aを照射するレーザ発振器1と、船体10の側壁に設置されレーザ光が水面11から散乱する散乱光を検出する複数の光センサ2を備え、これらにより水面位置を検出する水面位置検出装置と、水面位置検出装置で検出した水面位置と、プロペラの位置との関係からプロペラレーシングの可能性を判断するプロペラレーシング判断装置とを具備し、プロペラレーシングの可能性ありと判断したとき、推進器4に対してプロペラ3の回転数を下げるように指令を与えるもの。
水面位置検出装置は、船舶周辺の水面状態が逐次どのように変化しているのかを定量的に測定する。そして、プロペラ3の空気中への露出する可能性が高いと判断した場合、予めプロペラ3の回転数を下げるよう推進器4を制御する指令を送出する。
(もっと読む)
カメラシステムおよび画像生成方法
【課題】被検物が撮像画像上を移動した場合でも、良好な検波処理画像を得ることができるカメラシステムを提供する。
【解決手段】パルス光を被検物に照射する投光手段30と、前記パルス光が照射される領域を含む領域を繰り返し撮像する撮像手段20と、前記撮像手段で撮像された画像の画像信号を記憶する記憶手段40と、前記記憶手段に記憶された画像信号に対して、同期検波処理を行なって、前記投光手段から照射される前記パルス光の点灯消灯のタイミングに同期した検波処理画像を生成する同期検波処理手段と、前記被検物の移動速度を算出する移動速度算出手段と、前記移動速度算出手段により算出された前記被検物の移動速度に基づいて、前記被検物が撮像画像上を移動することにより前記検波処理画像内に発生するノイズ成分を低減するための補正を行なう補正手段と、を備える。
(もっと読む)
センサ角度の測定方法
【課題】簡便な構成により曲折部における加工品位を向上させることができるセンサ角度の測定方法を提供する。
【解決手段】ワーク3上の各教示点Pi及び対応する追加点Qiにセンサ4を順次位置させ、センサ4でワーク3までの距離を計測して各教示点Piにおけるセンサ4のワーク3に対する角度を測定する際に、溶接線13がワーク3の曲折部10の前後にわたる場合、各教示点Piに対応する追加点Qiを、教示点Piが、曲折部10に至る直前の加工ライン13についての最後の教示点Pmでない場合には当該教示点Piの前方に位置させ、最後の教示点Pmである場合にはその後方に位置する追加点Qmとする。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用しながら、光学系に機械的手段を用いずに被測定物の厚み方向の距離もしくは厚みを高精度に測距する測距方法及びレーザ測距装置を提供する。
【解決手段】反射部14を階段状とすることで、測定光と参照光との光路差が段差の間隔で連続的に変化する光強度データ列を得ることができる。そして、この光強度データ列をフーリエ変換することで各干渉光の明部の位置を取得し、第1レーザ光に基づく干渉光の明部の位置と第2レーザ光に基づく干渉光の明部の位置とが一致する第1位置と第2位置とに基づいて測距を行う。よって、光学系に機械的手段を用いずに被測定物6の厚み方向の距離Lもしくは厚みを高精度に測距することができる。
(もっと読む)
地盤変位測定機構を用いた警報発生装置
【課題】地盤変位の測定に於いて拡散レーザ光を用い、レーザ光の単位面積当たりの光量を減少し、人、動物への眼に対する影響を減少する。また、雨、霧、雪等の影響を少なくした観測を可能とする。また、地盤変位の発生が予測される位置への設置作業を迅速にし作業者の安全性を確保できる。また、測定機構により測定した位相のズレが一定の許容範囲を超えたときに警報発生機構によって警報を発生させる。
【解決手段】照射先のビーム直径を照射元のビーム直径よりも大きくした拡散レーザ光4を発振するレーザ光発振部1と、地盤変位の発生予測位置に設置するレーザ光反射板6と、反射される反射波7を受光する検出器8と、この検出器8によって受光した反射波7とレーザ光発振部1の照射波10の位相のズレからレーザ光発振部1とレーザ光反射板6の距離を計測する測定機構11と、位相のズレが設置時における基準値の許容範囲を超えたときに警報を発生させる警報発生機構14とから成るものである。
(もっと読む)
レーザ計測用ターゲット治具及びレーザ計測システム
【課題】計測システム全体の小型化及び軽量化を図るとともに、配管の取付位置を正確に特定することができる、レーザ計測用ターゲット治具及びレーザ計測システムを提供する。
【解決手段】第一フランジ11に一端部2a及び中間部2bが固定される計測器用固定治具2と、第二フランジ12に固定されるレーザ計測用ターゲット治具3と、計測器用固定治具2の他端部2cに固定されるレーザ計測器4と、第一フランジ11及び第二フランジ12の位置を算出する演算手段5と、を備え、レーザ計測用ターゲット治具3は、第二フランジ12に配置される台座31と、レーザ光を反射可能な表面32aを有し台座31に表面の一部が突出するように固定された球体32と、台座31を第二フランジ12に固定する固定手段33と、を有する。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
移動環境認識装置及び方法
【課題】高速、且つ高精度に測定対象の形状認識情報を得ることができる移動環境認識装置を提供する。
【解決手段】測定対象7に対して円錐走査を行う円錐走査手段1を備えている。円錐走査手段は、移動環境検出器3と、この移動環境検出器で計測した情報を加工する外界認識装置9を備えている。この外界認識装置は、円錐走査手段の測定データに基づいて前記測定対象の傾斜角、傾斜方向及び測定対象中心までの距離を算出する移動環境検出手段と、この移動環境検出手段が算出した前記測定対象の算出データに基づき、各測定対象の面形状を判断する面形状判断手段と、この面形状判断手段が水平面と判断した所定の測定対象の形状を認識する形状認識手段とを備えている。
(もっと読む)
眼鏡用測定装置及び三次元測定装置
【課題】 被検者に負荷をかけることなく角膜眼鏡間距離等の測定を行う眼鏡用測定装置を提供する。
【解決手段】 眼鏡用測定装置(10)は、指標マーク(SC)が眼鏡フレーム(23)に取り付けられた眼鏡(20)をかけた被検者を撮影する撮影部(12)と、撮影部で撮影された被検者の眼球の頂点を求めるとともに、指標マーク(SC)に基づいて眼鏡の眼鏡レンズ(21)と被検者の眼球の頂点(KP)との角膜眼鏡間距離(KG)を演算する演算部(14)と、を備える。
(もっと読む)
列車停止位置の検出方法及び検出装置
【課題】どのような路線に対しても低コストで導入でき、また装置の保守や点検に手間をかけることなく、列車停止位置を正確に検出する。
【解決手段】本発明の列車停止位置Pの検出方法は、停止動作中の列車Tの前面に対してスポット状の測定光2を左右方向に沿ってライン状に走査しつつ照射する距離センサ3を用いて、距離センサ3から列車Tの前面までの距離を測定し、測定された距離に基づいて、列車Tの停止状態及び停止位置を検出する。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
アンテナ位置判定装置
【課題】 2種類のレーザセンサを組み合わせて使用し、複雑な計測を行うことなく、アンテナの放射部が基準位置に入っているか否かを判定させることで、簡易な構成によるアンテナ位置判定装置を提供することを目的とする。
【解決手段】 固定治具にアンテナが固定された後、第1透過型レーザセンサ部及び第2透過型レーザセンサ部並びに複数の反射型レーザセンサ部を制御してレーザ光を発光させ、第1透過型レーザセンサ部及び第2透過型レーザセンサ部が遮光を検知し、複数の反射型レーザセンサ部が導出した距離が適正距離であるときに、放射部が基準位置に配置されていると判定し、第1透過型レーザセンサ部又は第2透過型レーザセンサ部の少なくとも一方が透過を検知したとき、又は、複数の反射型レーザセンサ部が導出した距離が適正距離でないときに、放射部が基準位置に配置されていないと判定するアンテナ位置判定装置。
(もっと読む)
受光装置
【課題】ラインイメージセンサーと同等の機能を有する比較的安価な受光装置を提供する。
【解決手段】検出領域における光を検出するための受光装置であって、ホトデテクターと、ホトデテクターに入光する光を規制する開孔を有するマスクを備えた受光手段と、受光手段を検出領域に渡り移送せしめる移動手段と、受光手段の移動位置を検出する位置検出手段とを具備している。
(もっと読む)
力学挙動解析システム、及び力学挙動解析方法
【課題】被解析試料の巨視的な動きを伴った場合であっても材料や構造物などの被解析試料の微視的な領域の力学挙動を簡便に解析可能な新規な力学挙動解析システム、及び力学挙動解析方法を提供する。
【解決手段】力学挙動解析システムは、被解析試料の解析表面を少なくとも被覆し、変形自在であって、かつ、被解析試料側の少なくとも表層に所定の周期構造が形成されている表面ラベルグレーティング膜及び被解析試料からなるサンプル60と、スポット光であるプローブ光を入射する照射手段20と、表面ラベルグレーティング膜からの回折光を検出する受光手段30と、被解析試料と受光手段との距離を検出する距離検出手段70と、回折角のデータを保持する記憶手段14と、記憶手段14に保持された複数の前記回折角のデータから、回折格子の周期構造変化を算出し、当該周期構造変化から被解析試料の力学挙動を解析する解析手段13と、を具備する。
(もっと読む)
トレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法
【課題】トレッドトランスファーとシェーピングフォーマとの芯ズレを、迅速に評価でき、生産ラインの精度低下を早期にフィードバックしうるとともに、装置コストの上昇を最小限に抑えうるトレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法を提供する。
【解決手段】トレッドリングを、シェーピングフォーマに保持された生タイヤ基体の半径方向外側のトレッド貼付位置まで搬送しかつ保持するトレッドトランスファーである。トレッドトランスファーのリング状移動台に、トレッド保持リング11の軸心11jとは直角な基準面S0上にて前記軸心11jを通るX軸上に配される第1のレーザ距離センサ21と、このX軸とは直交する向きのY軸上に配される第2のレーザ距離センサ22とを設ける。前記第1、2のレーザ距離センサ21、22にてシェーピングフォーマの支持軸5までの距離を測定する。
(もっと読む)
測定装置
【課題】被測定面の形状を高精度に測定することができる技術を提供する。
【解決手段】被測定面の形状を測定する測定装置であって、前記被測定面に接触する接触部材を含むプローブを保持するプローブハウジングと、前記被測定面に対する位置及び姿勢が固定され、前記被測定面の形状を測定するための基準となる基準ミラーと、前記基準ミラーと前記プローブとの間の第1距離を測定する第1距離測定部と、前記プローブハウジングと前記プローブとの間の第2距離を測定する第2距離測定部と、前記第2距離測定部で測定される前記第2距離が一定距離となるように前記プローブハウジングを駆動させながら前記第1距離測定部で測定される前記第1距離から前記接触部材の位置を特定し、当該接触部材の位置に基づいて前記被測定面の形状を算出する処理部と、を有する。
(もっと読む)
計測面傾き計測装置、プロジェクタ及び計測面傾き計測方法
【課題】投影面傾き計測装置、プロジェクタを小型化する。
【解決手段】投影面傾き計測装置11は、投光ユニットと、入射角センサと、を備える。入射角センサは、水平方向、垂直方向にそれぞれ、2つずつ配置される。投光ユニットは、スクリーンS上の水平方向、垂直方向に、それぞれ、設定された2つの測距点に光を投光して投光スポットを形成する。入射角センサは、投光スポットからの反射光を受光して、その入射角を検出する。この入射角センサは、2分割受光素子からなり、2つの受光素子に入射した光の受光割合に基づいて、反射光の入射角を検出する。このような構成により、位相センサで必須のレンズが不要となり、レンズの焦点距離を確保する必要もないので、小型化も可能となる。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
101 - 120 / 1,861
[ Back to top ]