
Fターム[2F065AA07]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸と直交方向 (556)
Fターム[2F065AA07]に分類される特許
101 - 120 / 556
ロボットの制御装置及びロボットのティーチング方法
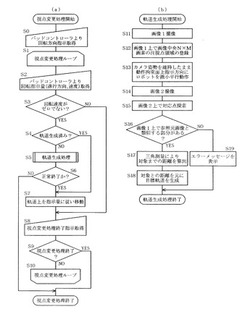
【課題】ロボットをティーチングする際に並行して撮像対象物までの距離計測を行うロボットの制御装置を提供する。
【解決手段】初期位置で撮像される画像フレームの中心周りで注視領域を設定し、初期位置の座標を移動元座標とする。入力された移動方向に対し、注視領域が撮像フレームに収まるようカメラを上記移動方向にTB(ベクトル)だけ微小移動させ、移動元座標,移動先座標(移動後の座標)からカメラの移動距離TC(ベクトル)を計算し、移動先座標,移動元座標で夫々捉えた画像から注視領域の移動距離を求めてカメラ間視差とし、カメラの焦点距離,移動距離,視差から三角測量法で移動元座標から注視点Pcまでの撮像距離を求め、入力された移動方向と撮像距離とから移動先座標を始点,撮像距離を半径としてカメラが注視点方向を常に向いた状態での目標円弧軌道を計算し、カメラを前記軌道に沿って移動させるようロボットに指令を出力する。
(もっと読む)
タッチセンサー式及び物体センサー式ディスプレイのための照明
統合された視覚及び表示システムは、表示面を通じて見るために表示画像を送信するように構成された表示画像形成層と、表示面の法線に対して狭い範囲の角度の、表示面上又は表示面の近くの1つ以上の物体からの反射を含む、赤外光を結像するように構成された結像検出器と、物体を照らすために赤外光を放射するように構成された視覚システムエミッターと、対向する上面及び/又は下面を有し、視覚システムエミッターから赤外光を受信し、上面及び下面からTIRによって赤外光を導き、表示面の法線に対して狭い範囲の角度の外側の物体上へ赤外光を投影するように構成された、可視光及び赤外光を伝達可能な導光路とを具備する。  (もっと読む)
(もっと読む)
部材の位置認識装置、位置決め装置、接合装置および部材の接合方法

【課題】部材の角にダレや欠けが発生している箇所と発生していない箇所が混在している部材の外形線を、画像処理を用いて正確に認識する。
【解決手段】平面を有する部材4を平面に垂直な方向から撮像した画像から部材4の外形線を演算する画像処理部3は、撮像部1が撮像した画像で部材の外形線と交差する複数の認識ラインのそれぞれで、部材4の外から内への方向で輝度が明から暗に変化する暗変化端点候補を検出する暗変化端点候補検出部3C、部材4の外から内への方向で輝度が暗から明に変化する明変化端点候補を検出する明変化端点候補検出部3D、暗変化端点候補と明変化端点候補とから端点を検出する端点検出部3E、複数の認識ラインで検出された端点との誤差の和が最小になるように部材の外形線を決定する外形線決定部3Fを有する。
(もっと読む)
内視鏡装置、計測方法、およびプログラム
【課題】計測精度の低下を抑制することができる内視鏡装置、計測方法、およびプログラムを提供する。
【解決手段】操作検出部42は、ユーザからの指示に基づいて、映像信号に基づく画像において照準を表示する表示位置を設定する。表示信号生成部49は、画像および照準を表示するための表示信号を生成する。輝度検出部45は、表示位置を基準とする画像内の部分領域の輝度を検出する。光量制御部46は、輝度に基づいてLED29の光量を制御する。計測処理部44は、映像信号に基づいて計測処理を実行する。
(もっと読む)
測定装置及びそれを用いた機器
【課題】測定対象物と受光素子との離間距離に依存せずに、反射光学像を用いて高精度に測定対象物の測定装置との相対変位等を測定する。
【解決手段】測定装置は、可干渉性を有する発散光束を射出する光源10と、光源から測定対象物20に照射された光束により発生した反射光学像を受光する受光素子31とを有する。測定装置は、光源の発光面と受光素子の受光面は同じ平面C上に配設され、光源から射出された発散光束を光学パワーを持った面を介さずに測定対象物に照射する。測定装置は、tan(θ/2)>D/(2・L)を満足する。θは光源の配光角度範囲、Dは光源の発光領域の中心と受光素子の受光領域の中心との間の距離、Lは光源の発光面から測定対象物までの距離である。
(もっと読む)
回転精度測定方法及び測定装置
【課題】マイクロスピンドルのラジアルモーション、アキシャルモーション及びアンギュラモーション全ての誤差を同時に且つ正確に計測可能とする。
【解決手段】回転体としてその回転軸線に沿って連接された第1及び第2の測定対象物11,12を含み、第1の測定対象物11に対して直交2方向から光を照射する一対の第1の光照射手段15Aと、第1の光照射手段15Aから照射された光をそれぞれ受光する一対の第1の受光手段14Aと、第2の測定対象物12に対して直交2方向から光を照射する一対の第2の光照射手段15Bと、第2の光照射手段15Bから照射された光をそれぞれ受光する一対の第2の受光手段14Bと、を有する。
(もっと読む)
処理システム
照明デバイスと、対象物を受容する対象物スライド面を有する対象物スライド部と、を備えるプレート形状の対象物の処理システムを改良するために、照明デバイス及び対象物スライド部は、対象物スライド部に対するプレート形状の対象物の位置が正確に決定されうるように互いに対して移動可能である。本発明によれば、少なくとも一つの縁部照射ユニットを備える縁部取得デバイスが形成されており、縁部照射ユニットは、対象物縁部領域の少なくとも一部において照射領域を備えており、該照射領域内において、各対象物縁部領域に配置される対象物縁部は、光を面状に放出する対象物スライド部の複数の側面によって照射される。対象物スライド部の反対に配置される対象物の側面において、対象物スライド面から或る距離において、少なくとも1つの縁部画像取得ユニットが形成されており、該縁部画像取得ユニットは、照射領域に配置される対象物縁部の縁部区域を、縁部画像として画像面に像形成する。各縁部画像は、少なくとも1つの縁部画像取得ユニットを使用することにより、対象物スライド部に対する位置的な正確さを伴って取得されうる。  (もっと読む)
(もっと読む)
オーバレイ測定方法、リソグラフィ装置、検査装置、処理装置、及びリソグラフィ処理セル
【課題】オーバレイ測定を向上させる。
【解決手段】生成物マーカ格子の非対称性などの生成物マーカ格子の横プロファイルに関する情報が測定結果から判定される。オーバレイマーカ格子がレジスト膜に印刷された後、生成物マーカ格子に対するオーバレイマーカ格子の横オーバレイがスキャトロメータによって、且つ適宜の処理モデルと組み合わせた判定済みの非対称情報を使用して測定される。アライメントセンサの情報を使用して、先ず生成物格子を再構築してもよく、この情報はスキャトロメータに送られ、スキャトロメータは生成物とレジスト格子との積層を測定し、積層によって散乱された光は、オーバレイを計算するために積層のモデルを再構築するために利用される。
(もっと読む)
露光装置、露光方法及びデバイス製造方法
ウエハステージ(WST1,WST2)の位置情報は、定盤(14A、14B)の下方に配置された計測バー(71)が有する、複数のエンコーダヘッド、Zヘッドなどにより、微動ステージ(WFS1,WFS2)の下面に配置されたグレーティングを用いて、計測される。従って、ウエハステージ(WST1,WST2)の位置情報の高精度な計測が可能となる。また、ウエハステージのガイド面が所定のクリアランスを介して並べて配置された2つの定盤(14A,14B)によって形成されているので、定盤が一体である場合に比べて、1つ1つの定盤の取り扱いが容易になるとともに、定盤近傍のメンテナンスなどが容易になる。 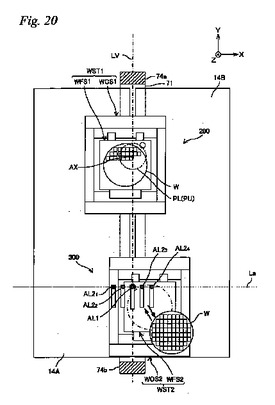 (もっと読む)
(もっと読む)
画像測定プローブと操作方法
測定対象物体の画像を取得し、これを供給するための画像測定プローブの操作方法。画像測定プローブは、座標位置決め装置の連続的角度調整可能ヘッドに取り付けられ、連続的角度調整可能ヘッドは少なくとも1つの回転軸を有する。物体と画像測定プローブは、測定動作中、その少なくとも1の回転軸の周囲で、および少なくとも1自由度の直線運動で相互に関して移動できる。この方法は、画像測定プローブによって取得された少なくとも1つの画像を処理してフィードバックデータを得るステップと、画像測定プローブと物体との間の物理的関係を、前記フィードバックデータに基づいて制御するステップと、を含む。  (もっと読む)
(もっと読む)
弾丸検出装置及び弾丸検出方法
【課題】検出スクリーンを同時に通過した複数個の弾丸を検出可能な弾丸検出装置及び弾丸検出方法を提供する。
【解決手段】計測装置4a〜4cが、弾丸の飛行方向に沿って配置された3つの検出スクリーン2a〜2cを同時に通過した複数の弾丸の検出スクリーン上における通過位置座標を検出スクリーン毎に検出する。計測処理装置8が、計測装置4a〜4cにより検出された通過位置座標を用いて検出スクリーンを同時に通過した弾丸の数、飛行経路、速度を算出する。
(もっと読む)
正射投影画像を作成するための画像処理方法、装置およびプログラム
【課題】 撮影による画像の取得から正射投影画像の作成までを簡易化し、正射投影画像を精度良く作成する画像処理方法、装置およびプログラムを提供する。
【解決手段】 本発明は、所定間隔で離れた二つの標点を持つ被写体が対象面上に配置された状態で対象面を撮影機器によって撮影した画像の情報、撮影条件に関する情報および撮影機器の光学特性に関する情報を取得する情報取得工程と、撮影条件に関する情報および撮影機器の光学特性に関する情報から射影変換式を定めた上で、被写体における二つの標点間の距離情報を考慮して射影変換式を決定する要素を調整し、調整された射影変換式に基づき、撮影画像を正射投影画像に変換する画像変換工程とを備える。
(もっと読む)
粒子に作用する光学力を測定する方法および装置
捕獲粒子に作用する光学力を測定するための装置および方法。一実施形態では、本装置および方法は、顕微鏡の上または内部に配置されたチャンバの入口面と出口面の間において、単一の光ビームを用いて浮遊媒体中に浮遊する粒子を捕獲するように構成された光学顕微鏡の光学列中で使用することができる。この装置および方法は単一の収集レンズ系を使用し、この収集レンズ系は、チャンバ中に粒子を浮遊させるための浮遊媒体の屈折率以上の開口数を有し、浮遊チャンバの出口面近傍またはこの出口面と接触させて設置することができる。光検知デバイスは、収集レンズの後焦点面内または後焦点面の近くに配置されるか、あるいは後焦点面の光学等価物に配置され、収集レンズによって光検知デバイスの上に投影された光分布の重心のx座標とy座標から導出される、前記粒子に作用する光学力の測定値を直接または間接に生成することができる。 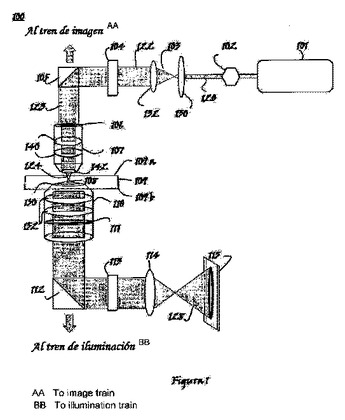 (もっと読む)
(もっと読む)
形状検査装置,形状検査方法
【課題】ディスク部材について,表裏各面と端面を形成するチャンファ部との境界部分において突起した形状欠陥を検出することができること。
【解決手段】1つの平面内の複数の位置各々に配置された複数のLED12からディスク基板1の測定部位Pに対し,順次異なる照射角度で光を照射し,その照射ごとに,計算機30により,測定部位Pからの反射光の像のカメラ20R,20Lで撮像し,さらに,計算機30により,各LED12に対応した撮像画像と光の照射角度φとに基づいて,測定部位Pの表面角度の分布を算出し,表面角度の変化が許容範囲内か否かの判別により表面形状の良否を判別し,表面形状の画像を,形状不良部分を明示しつつ画像表示装置に表示させる。
(もっと読む)
測定装置、露光装置及びデバイスの製造方法
【課題】スケールの位置が基準位置からずれている場合であっても、被測定体(例えば、ステージ)の位置を高精度に測定することができる測定装置を提供する。
【解決手段】いずれか一方が被測定体に設けられるスケール及びセンサを備え、前記スケールを前記センサで読み取ることで前記被測定体の位置を測定する測定装置であって、基準位置からの前記スケールのずれ量を検出する検出部と、前記検出部によって検出された前記基準位置からの前記スケールのずれ量に基づいて、前記スケールを前記センサで読み取ることで測定された前記被測定体の位置を補正する演算部と、を有することを特徴とする測定装置を提供する。
(もっと読む)
膜厚測定装置及び測定方法
【課題】 膜状の測定対象物の膜厚の時間変化を精度良く測定することが可能な膜厚測定装置、及び膜厚測定方法を提供する。
【解決手段】 第1波長λ1の測定光成分、及び第2波長λ2の測定光成分を含む測定光を測定対象物15へと供給する測定光源28と、測定対象物15の上面からの反射光及び下面からの反射光の干渉光について、第1波長λ1の干渉光成分、及び第2波長λ2の干渉光成分に分解する分光光学系30と、第1、第2干渉光成分のそれぞれの各時点での強度を検出する光検出器31、32と、膜厚解析部40とを有して膜厚測定装置1Aを構成する。膜厚解析部40は、第1干渉光成分の検出強度の時間変化での第1位相と、第2干渉光成分の検出強度の時間変化での第2位相との位相差に基づいて、測定対象物15の膜厚の時間変化を求める。
(もっと読む)
位置検出装置、露光装置及びデバイス製造方法
【課題】照明開口絞りと結像開口絞りとの位置ずれの影響を低減する。
【解決手段】瞳面に配置させた第2照明開口絞り4Bを通過した照明光を用いて結像系の結像開口絞りASの像を第2像検出素子に撮像させ、次に、回転盤4を回転させて瞳面に第1照明開口絞り4Aを配置させ、第1照明開口絞りを通過した照明光を用いて第1照明開口絞りの像を第2像検出素子41に撮像させ、撮像された結像開口絞りの像と第1照明開口絞りの像とに基づいて、結像開口絞りに対する第1照明開口絞りの位置ずれの影響を低減するように第1照明開口絞りの補正処理を行う。位置検出装置は、補正処理が行われた前記第1照明開口絞りを通過した照明光を用い、第1像検出素子11により検出されたマークの像の位置に基づいて被検物体の位置を検出する。
(もっと読む)
計測装置
【課題】計測装置において、計測対象物の変位計測または二次元画像の撮像について、より高度な計測を実現する。
【解決手段】コントローラ200では、センサヘッド100の変位計測部に、計測対象物500の高さの計測のためのフォトダイオード2の受光信号を出力させ、これに基づき、計測対象物500の表面の高さを計測する。次に、コントローラ200では、計測対象物500の高さに基づいて、画像取得タイミングを決定する。具体的には、テーブルから、算出された計測対象物500の高さTに対応するピント調整値Pが取得され、そして、当該ピント調整値Pを実現するタイミングで画像取得信号を撮像素子9に送信する。これにより取得された画像より、計測対象物500の高さに基づいて、計測対象物500上の2点間の長さを演算する。
(もっと読む)
画像相関変位計、及び変位測定方法
【課題】取得画像が回転されていても、面内変位の平行移動量と回転量の両方を高精度且つ高速に計測することが可能となる。
【解決手段】投光ビーム114により基準となる位置における測定対象102への照射により得られるスペックルパターンの基準画像Sと、面内変位後における測定対象102への投光ビーム114の照射により得られるスペックルパターンの取得画像Tと、の相関から、面内変位を測定する画像相関変位計100であって、2つの基準画像Sを記憶する記憶部122と、2つの基準画像Sと取得画像Tとの相関演算を行うと共に、相関演算の結果から前記面内変位のうち平行移動量Mをそれぞれの基準画像Sに対して求める移動量処理部124と、2つの基準画像S間の距離Lとそれぞれの平行移動量Mの違いとから面内変位のうちの回転量θを求める回転量処理部126とを備える。
(もっと読む)
集積回路の解析のために動的光子放射を処理する方法及びこの方法を実行するためのシステム
本発明は、空間的及び/又は時間的相関ステップ(206)に対応しており、それぞれの光子に割り当てられた重みを用いて、検出された光子をフィルタリングする第1ステップ(208)を有し、回路(24)によって放射された孤立した光子の測定からの取得データを用いて、集積された電子回路(24)における欠陥を解析する画像処理方法に関する。更に、処理方法は、イベント位置及びウインドウFev(k)内に含まれる全ての光子の重みの和と等しいイベント重みWev(k)とによって特徴付けられるイベント(ev(k))における所定の中央の光子(k)の周りのグループにおいて、ウインドウ(Fev(k))内に位置する光子を配置する少なくとも1つの基本ステップ(716)を有する。  (もっと読む)
(もっと読む)
101 - 120 / 556
[ Back to top ]