
Fターム[2F065AA07]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸と直交方向 (556)
Fターム[2F065AA07]に分類される特許
41 - 60 / 556
路面画像処理システム及び路面画像処理方法
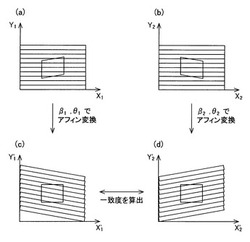
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
検出装置、検出方法、インプリント装置及びデバイス製造方法

【課題】 異なる2つの物体の回転ずれを計測する際に、従来と比較して計測時間の短い検出装置、検出方法、インプリント装置及びデバイス製造方法を提供すること。
【解決手段】 異なる2つの物体にそれぞれ形成された格子マークが重なることによって生じる干渉縞を用いて、前記2つの物体の相対的な回転ずれ量を求める検出装置において、前記干渉縞を検出する検出器と、該検出器で検出された前記干渉縞の傾きから前記異なる2つの物体の相対的な回転ずれ量を求める演算部と、を有することを特徴とする検出装置。
(もっと読む)
ふく進測定装置、ふく進測定システム及びふく進測定方法
【課題】簡素な構成でふく進量測定の作業効率や測定精度等を向上させる。
【解決手段】ふく進測定装置4は、鉄道のレール6R,6L上を走行する車両5に搭載され、車両走行中に、レール6R,6Lから側方に離れた位置で地面と一体的に設けられた基準マーカ2R,2Lと、レール6R,6Lと一体的に設けられたレールマーカ3R,3Lとを撮影するラインセンサ11R,11L,12R,12Lと、ラインセンサ11R,11L,12R,12Lで撮影された画像上において基準マーカ2R,2L及びレールマーカ3R,3Lを検出する画像処理部と、画像処理部で検出された情報から基準マーカ及びレールマーカのレール長手方向の位置を算出する位置算出部と、位置算出部で算出された各位置からレール6R,6Lのふく進量を算出するふく進量算出部と、を備えている。
(もっと読む)
位置測定装置
【課題】位置測定装置における可動部材をできる限り他の部材と機械的に接続せずに成る高精度の位置測定装置を提供すること。
【解決手段】検出ユニット20と信号ユニット30を構造的に分離されたユニットとして形成し、検出ユニット20を測定標準10に対して少なくとも1つの測定方向xに沿って変位可能に配置し、光源から照射されるビームを信号ユニット30から検出ユニット20の方向へ照射し、少なくとも1対の部分ビームを検出ユニット20から信号ユニット30の方向へ照射し、検出ユニット20及び信号ユニット30を互いに平行な平面内に配置し、信号ユニット30と検出ユニット20の間におけるビームの少なくとも一部の拡がり方向を前記平面に対して垂直に配向するよう構成した。
(もっと読む)
検査方法および検査装置
【課題】マスクの歪の影響によらずパターンの良否を正確に判定することのできる検査装置および検査方法を提供する。
【解決手段】マスク上の任意の少なくとも4点の座標を測定する(S101)。次いで、これらの少なくとも4点について、それぞれ対応する設計データの各座標との差を求め、最も差の大きい1点を選択する(S102)。次に、選択した1点と設計データの座標との差が予め設定した閾値を超えるか否かを判定する(S103)。閾値以下であれば、少なくとも4点全てを用いて、光学画像と参照画像との位置合わせを行う(S104)。一方、閾値を超える場合には、この点を除外し、残りの少なくとも3点を用いて位置合わせを行う(S105)。
(もっと読む)
ビードスティフナーの検査方法及び検査装置
【課題】ビードスティフナーの接合部分の検査において、基準形状と比較することなくビードスティフナーの形状を正確に測定して良否判定の精度を向上させるビードスティフナーの検査方法及び検査装置を提供する。
【解決手段】環状のビードコアと、帯状に成形され、延長方向の端部と端部とを互いに接合させてビードコアの外周に巻きつけられたスティフナーとを有するビードスティフナーの良否を判定する検査方法であって、ビードスティフナーの断面形状の形状データを取得する工程と、形状データからビードコアの頂点を検出する工程と、頂点から指定された領域内にスティフナーの端部の有無を検出する工程とを含み、スティフナーの端部の有無に基づいてビードコアとスティフナーとの接合の良否を判定する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、第1光源モジュール126および第2光源モジュール127によって、検出光L2の放射角度範囲において強度が変化する光強度分布を形成した際の受光部13の受光強度に基づいて対象物体ObのXY座標を検出する。第1光源モジュール126および第2光源モジュール127は、Z軸方向で離間しており、検出光L2の放射角度範囲において強度が一定の光強度分布を形成した際の受光部13の受光強度に基づいてZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の摩耗量や偏位量を正確に測定する。
【解決手段】架線検測車屋根上にトロリ線へ投光する光を照射する投光ユニットを設け、トロリ線より反射した光を受光する受光ユニットを設ける。受光ユニットより受光した信号を二値化回路によってある閾値で二値化し、エッジ検出回路でパルス波形の立ち下がりから次の立ち上がりまでの距離に基づいて、剛体やイヤーなどのノイズ信号とトロリ線の信号を判別し、トロリ線摺面の検出信号を得る。エッジ検出回路から得られた検出信号は、演算装置によって前回の偏位データと今回の偏位データが比較され、前回のものと最も近い信号をトロリ線データとして検出し、トロリ線摩耗量(残存直径)に変換される。これによって、ノイズによる誤検出を低減させ、トロリ線の外形を正確に求める。
(もっと読む)
組立品検査装置および方法
【課題】各検査員の主観的判断に依拠するために生じる検査結果のバラツキをなくし、常に客観的な判断基準で検査を行える組立品検査装置および方法を提供する。
【解決手段】組立中子11を搬送軌道の搬送方向に沿って搬送する搬送装置53と、組立中子11の上側部をなす上部中子13の搬送方向に沿った複数箇所に設けた搬送方向に延びる上側エッジ部52a、52bおよび各上側エッジ部52a、52bに対応する位置で、かつ組立中子11の下側部をなす下部中子12の搬送方向に沿った複数箇所に設けた搬送方向に延びる下側エッジ部51a、51cとを検出するセンサ装置54と、センサ装置54で検出した上側エッジ部52a、52bと下側エッジ部51a、51cとの相対距離を搬送方向に沿った複数箇所の上側エッジ部52a、52bと下側エッジ部51a、51cの間において算出するコントロール部55を備えた。
(もっと読む)
プーリの軸方向相対位置測定方法及びプーリの軸方向相対位置測定装置
【課題】簡単な装置によって狭小なスペースであってもプーリ間の軸方向相対位置を測定可能なプーリの軸方向相対位置測定方法等を提供する。
【解決手段】平行して配置される第1の回転軸及び第2の回転軸にそれぞれ取り付けられた第1のプーリP1及び第2のプーリP2の軸方向相対位置を測定するプーリの軸方向相対位置測定方法であって、第1のプーリの溝と係合することによって第1のプーリに対して軸方向における位置が位置決めされるとともに、第1のプーリの軸方向と直交する平面に沿った光線を照射する投光装置130によって第2のプーリの外周面を照射し、第2のプーリにおける光線の受光位置と、第2のプーリにおける所定の測定基準位置との軸方向距離を測定する構成とする。
(もっと読む)
ロック狂い検出装置
【課題】鎖錠桿に塗布されたグリースの一部が移動スリット保持体、または固定スリット保持体のスリットを塞いでしまうことによる誤検出を防止し得るロック狂い検出装置を提供する。
【解決手段】ロック狂い検出装置1は、転てつ機2の鎖錠桿4a,4bが出入りする鎖錠桿案内部と、鎖錠桿4a,4bに取り付けられた移動スリット保持体とともにロック狂いの検出に用いられる固定スリット保持体の間に、特徴的なパッキン部が設けられている。パッキン部の先端は、鎖錠桿4a,4bの進入ごとに鎖錠桿4a,4bの表面を擦るため、鎖錠桿4a,4bの表面に塗布されたグリースなどの潤滑剤は、パッキン部に遮られて、固定スリット保持体または移動スリット保持体が設けられた領域へ侵入することがない。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の偏位量を正確に測定する。
【解決手段】トロリ線測定装置は、トロリ線に向けて光を投光し、その反射光を受光することによってトロリ線の外形を測定する。このトロリ線の外形を測定する際に、剛体電車線区間では剛体部やイヤー部からのノイズが多く正確に測定することが困難である。そこで、このトロリ線測定装置は、剛体電車線区間でトロリ線及びその近傍の電車線設備(剛体部及びイヤー部)の画像を撮影し、撮影された画像に基づいて電車線設備の偏位を測定し、その測定結果をトロリ線の外形の測定に反映させるようにした。
(もっと読む)
ロボット装置
【課題】高精度なエンコーダーを用いずに、可動部の位置制御を高精度に行うロボット装置を提供する。
【解決手段】基体1と、基体1に対して駆動可能な可動部2と、可動部2を駆動するアクチュエーター3と、可動部2とともに動く部分に取り付けられた慣性センサー4と、画像を撮影し画像により慣性センサー4の位置または角度を検出する絶対位置検出部として、画像センサー5及びマーカー6と、画像センサーにより検出された位置情報の間を、慣性センサー4の信号で補間する演算部9と、を備える。
(もっと読む)
移動情報測定装置
【課題】移動体の曲面からの信号に関してデフォーカスによる信号振幅減少を低減し、移動情報の検出精度の低下を抑制する。
【解決手段】光源と、移動方向に曲面を備える移動体と、前記曲面からの集光された反射光または透過光を受講する受光素子と、を有する移動情報測定装置において、前記曲面が移動方向に複数種の曲率を備える。
(もっと読む)
サンプル媒体上のレチクルマークを用いて、希少細胞のスキャナ画像座標を顕微鏡座標に変換する方法
【課題】物体の位置を取得する方法を提供する。
【解決手段】画像形成システムの第1座標空間が定められ、該第1座標空間における座標が指定される。第2の画像形成システムの第2座標空間が定められ、該第2座標空間における座標が指定される。第1座標空間の指定された座標を用いることにより、座標変換パラメータが計算される。その後、第1座標空間において少なくとも1つの物体の座標が指定され、該物体の第1座標空間座標が第2座標空間における独自の座標に変換される。
(もっと読む)
位置検出装置
【課題】パネル上に穴加工の基準となる目標点の座標を短時間で検出することが可能な位置検出装置を提供する。
【解決手段】本発明に係る位置検出装置1は、被測定面と交差する方向の高さを有する基準ボルトBの頭部Btに直線光を照射し、その反射光から基準ボルトBの頭部Btまでの距離を測定する光学センサ2と、直線光を照射方向と交差する2つの方向へ移動させる回転支軸3と、光学センサ2により所定の値の距離が測定された時点の回転支軸3の移動位置を検出する位置センサと、この位置センサから得られた複数の位置データから2つの移動方向により規定される平面において、基準ボルトBの略中心にあるボルト穴Pbの中心の座標を演算する演算部と、を有するものである。
(もっと読む)
表面形状計測装置、及び表面形状計測方法
【課題】計測対象物の三次元形状を容易に、且つリアルタイムに得ることができる表面形状計測装置、及び表面形状計測方法を提供する。
【解決手段】道路8の表面にレーザビーム9を走査させて、道路8の表面に照射したレーザビーム9の方位毎の測距データを出力する測域センサ1と、レーザビーム9の投光面の一部を含んだ道路8の表面を撮像するカメラ3と、測域センサ1、及びカメラ3を道路8の表面に沿って車輪7を回転させて移動させる走行台車5と、走行台車5により測域センサ1、及びカメラ3を移動させた時に測域センサ1から得られた測距データを演算処理してz軸方向の位置座標を求め、カメラ3から得られた画像データを演算処理してx軸方向、並びにy軸方向の位置座標を求める位置座標検出手段と、位置座標検出手段により求められた各軸方向の位置座標に基づいて道路8の三次元形状を演算するPC4と、を備えて構成されている。
(もっと読む)
自動改札装置
【課題】先行する無札者に続く後続の利用者の磁気媒体の投入及び無線媒体の受付を確実に禁止できるようにする。
【解決手段】通路内に第1の無札予備判定ポイントとこの第1の無札予備判定ポイントの通行方向上流側に第2の無札予備判定ポイントを設定し、先行する利用者が無線媒体を翳していないと判別されて前記通路内の第1の無札予備判定ポイントに到達したことが検出されるのに基づいて後続の利用者の無線媒体の受付を禁止し、先行する利用者が磁気媒体を投入していないと判別されて前記通路内の第2の無札予備判定ポイントに到達したことが検出されるのに基づいて後続の利用者の磁気媒体の投入を禁止するように制御する制御手段を備える。
(もっと読む)
計測装置及び画像形成装置
【課題】記録媒体の変位に追従して外周面が変位させられる追従部材の変位量を、回転体の偏心の影響を受けずに計測すること。
【解決手段】計測装置200は、搬送路32に沿って搬送される記録媒体Pに外周面を接触させ、記録媒体Pの変位に追従して当該外周面が変位させられる追従部材210と、当該外周面の変位量を光学的に計測する変位量計測手段とを有する。
(もっと読む)
41 - 60 / 556
[ Back to top ]