
Fターム[2F065AA07]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 光軸と直交方向 (556)
Fターム[2F065AA07]に分類される特許
21 - 40 / 556
物品認識装置における照明の設定値設定方法および物品認識装置
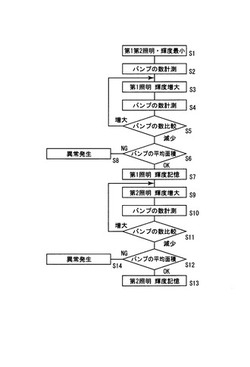
【解決手段】ボンディング装置を構成する物品認識装置は、基板のバンプに照明光を照射する第1照明と、該第1照明とは異なる角度から上記バンプに照明光を照射する第2照明と、上記バンプで反射した上記照明光の反射光を撮影する第1撮影手段とを備えている。上記第2照明の輝度を固定したまま、第1照明の輝度を変化させて(S3)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における第1照明の輝度を記憶する(S7)。続いて第1照明の輝度を上記記憶した輝度で固定したまま、第2照明の輝度を変化させて(S9)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における上記一方の照明の輝度を記憶する(S13)。
【効果】照明の設定値の設定を容易にかつ安定して行うことができる。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法

【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
干渉計方式により間隔測定するための機構
【課題】十分に平行に配設された二つのプレート間で、高精度で干渉計方式により間隔測定するための機構を提供する。
【解決手段】光源3.1から発せられた光束が、第一プレート1にある分光器要素1.2に傾斜して当たり、そこで反射される参照光束と透過する測定光束に分割される。測定光束は第二プレート2にあるリフレクタ要素2.2に当たり、そこで第一逆反射を受ける。参照光束は第一屈折要素3.2aを、測定光束は第二屈折要素3.2bを通過し、二つの光束は引き続いて、それぞれ関連配置された逆反射器3.3を通過して、測定光束は第三屈折要素3.2cを、参照光束は第四屈折要素3.2dを通過する。そして参照光束は第一プレート1で反射を、測定光束は第二プレート2のリフレクタ要素2.2で第二逆反射を受け、それにより二つの光束が、共直線で検知ユニット3の方向に伝播し、そこで位相がずれた複数の走査検知信号を生成することができる。
(もっと読む)
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
トロリ線データ比較装置
【課題】過去のトロリ線データと現在のトロリ線データとで走行位置を正確に一致させることを可能としたトロリ線データ比較装置を提供する。
【解決手段】車両の屋根上に配置されて鉛直上方のトロリ線を撮影するラインセンサカメラ2と、ラインセンサカメラ2から入力される映像信号を収録する画像録画部と、画像録画部から現在のトロリ線画像を入力するラインセンサ画像入力部5a、現在のトロリ線画像からトロリ線の摩耗及び偏位を抽出する摩耗・偏位抽出部5b、過去のトロリ線画像と現在のトロリ線画像とから車両の偏位の位置ずれ量を検出する偏位位置ずれ検出部5c、及び位置ずれ量を現在のトロリ線画像に反映し、過去のトロリ線画像と比較する摩耗量比較部5dを備える画像処理部とから構成した。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層に接触した状態で、原板Mおよび基板のそれぞれに形成されたアライメントマークを、1つの認識手段3により、両アライメントマークが重なる方向から、一方のアライメントマークを撮像した後、他方のアライメントマークを撮像し、得られた両アライメントマークの画像にそれぞれ位置誤差補正処理を行う。そのため、補正後の両アライメントマーク画像を用いて高精度なアライメントを行うことが可能になる。
(もっと読む)
電気転てつ機のロック狂い検知器の位置調整冶具
【課題】電気転てつ機のロック狂い検知器の固定スリット部材の位置合わせを容易に行うことができる電気転てつ機のロック狂い検知器の位置調整冶具を提供する。
【解決手段】電気転てつ機本体に着脱可能で固定スリットが形成された固定スリット部材と、固定スリットに光を通過させる発光素子および受光素子と、を備えるロック狂い検知器の位置調整を行うための電気転てつ機のロック狂い検知器の位置調整冶具21において、電気転てつ機本体に着脱可能な本体部22と、固定スリット部材に着脱可能で本体部22に電気転てつ機の鎖錠カンの移動方向に移動可能に支持された移動部23と、移動部23と連結されて移動部23を鎖錠カンの移動方向に移動させるネジ部24と、を備えている。
(もっと読む)
長さ測定装置
【課題】搬送中の長尺材の長さを精度よく測定することができる長さ測定装置を提供する。
【解決手段】長さ検出装置1は、搬送ライン2の搬送方向上流側に設けられた通過検出部3と、搬送方向下流側に設けられた位置検出部4と、長尺材の長さを算出する算出部5と、演算部5等を制御する制御部6を備えている。通過検出部3は、搬送ライン2に向けて投光する複数の通過投光部31と、搬送ライン2を挟んで通過投光部31と対向して設けられた複数の通過受光部32とをセットで具備している。位置検出部4は、搬送方向にほぼ直交する光を搬送ライン2に向けて投光し、該光を該搬送方向に平行走査する投光部41と、該投光部41と搬送ライン2を挟んで対向し、該投光部41からの光を受光する受光部42とを具備している。
(もっと読む)
位置検出装置、インプリント装置及び位置検出方法
【課題】 位置合わせに用いるマークからの光量を多くして検出しやすくする位置検出装置、及び、それを用いたインプリント装置を提供する。
【解決手段】 本発明の位置検出装置は、第一方向と、第一方向と異なる第二方向にそれぞれ周期をもつ第一回折格子と、第1回折格子の第二方向の周期と異なる周期を第二方向にもつ第二回折格子と、を斜入射照明する照明光学系と、第一回折格子と第二回折格子とからの回折光を検出する検出光学系と、を備え、検出した回折光に基づいて第一回折格子と第二回折格子との第二方向に関する相対的な位置を検出する位置検出装置であって、照明光学系はその瞳面において、第一方向に、複数の極を有する光を照明することを特徴とする。
(もっと読む)
多方向近接センサー
【課題】多方向の動き検出機能を有する近接センサーを提供する。
【解決手段】近接センサーは、ASIC(特定用途向け集積回路)チップ104、特定のシーケンスで光を放射するように構成された少なくとも3つの光源102、及び、光を受光して出力信号を生成するように構成された光検出器106を備える。多方向近接センサーは、少なくとも1つの側面を有する第1の近接センサーと100、第1の近接センサーの該少なくとも1つの側面にほぼ平行な面の上における物体の動きを検出するように構成された第2の近接センサーを備え、この場合、該第2の近接センサーは第1の近接センサー100に接続される。多方向動き検出近接センサーはPCBを有し、その場合、2以上の近接センサーを、PCBに配置して、多方向における動きを検出できるように一体化する。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測する際に、干渉用の光学系をコンパクトに配置可能として、かつ格子パターン面の高さ変化に対する干渉光強度の低下を抑制する。
【解決手段】エンコーダ10Xは、第1部材6に設けられたX軸の回折格子12Xと、計測光MX1,MX2を回折格子12Xの格子パターン面12Xbにほぼ垂直に入射させるレーザ光源16と、第2部材7に設けられて、回折格子12Xから計測光MX1によって発生する回折光DX1を回折格子12Xに再度入射させる直角プリズム26Aと、回折光DX1によって発生する回折光DX2と他の回折光EX2との干渉光を検出する光電センサ40Xと、を備える。
(もっと読む)
計測装置、露光装置およびデバイス製造方法
【課題】計測対象物の物理情報を高精度に得るために有利な技術を提供する。
【解決手段】計測装置33は、光源1からの光を計測対象物3に入射させる計測光と参照面4に入射させる参照光とに分割するビームスプリッタ2aと、前記計測対象物3で反射された前記計測光と前記参照面4で反射された前記参照光とを合成して合成光を生成するビームコンバイナ2bとを有し、前記合成光に基づいて前記計測対象物3の物理情報を得るように構成されている。前記計測装置33は、前記計測光と前記参照光との空間コヒーレンスを変更するコヒーレンス制御部10を備える。
(もっと読む)
光軸調整システム
【課題】撮影画像における基準マーク画像のズレを考慮することにより光軸調整の誤差を低減する。
【解決手段】カメラ2と、タッチパネル式ディスプレイ3と、画像処理ECU4と、を備え、画像処理ECU4は、タッチパネル式ディスプレイ3の操作によりカメラ2により基準マークが撮影された撮影画像における基準マーク画像の位置が指示位置として指示されると、この指示位置と所定の基準位置との関係に基づいてカメラ2の光軸調整を行う光軸調整部41と、撮影画像の画面特性に基づいて撮影画像における基準マーク画像の位置ズレ量を算出する位置ズレ量算出部42と、位置ズレ量算出部42が算出した位置ズレ量により指示位置を補正する指示位置補正部43と、を備える。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】光学系の高さを低くするとともに、回折格子からの0次光の影響を低減して計測精度を向上する。
【解決手段】X軸のエンコーダ10Xは、第1部材6に設けられ、X方向を周期方向とする回折格子12Xと、可干渉性のある計測光MX1及び参照光RX1を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1を回折格子12Xに向けてリトロー角から所定角度ずれた角度で反射する傾斜ミラー32XAと、回折格子12Xからの回折光と参照光RX1との干渉光を検出する光電センサ40XAと、光電センサ40XAの検出信号を用いて第1部材6に対する第2部材7のX方向の相対移動量を求める計測演算部42Xと、を備える。
(もっと読む)
ホースクリップ組付け状態検査方法
【課題】ホースクリップが周方向の所定位置に組付けられているかどうかを容易に管理することが可能なホースクリップ組付け状態検査方法を提供する。
【解決手段】ゴムホース及びこのゴムホースに組み付けられたホースクリップをカメラで撮像する工程と、これらのゴムホース及びホースクリップの画像を検査パターンに画像処理する工程と、この検査パターンを、予めホースクリップの合格パターンとして記憶されたホースクリップの所定周方向組付け位置のパターンと比較する工程と、ホースクリップの周方向組付け位置の合否を判定する工程と、を備える。
(もっと読む)
露光装置、デバイス製造方法、及びクリーニング方法
【課題】汚染に起因する性能の劣化を抑制できる露光装置を提供する。
【解決手段】露光装置は、露光光の光路を第1液体で満たすように第1液体で液浸部を形成可能な第1部材と、第1部材から離れた位置で第2液体で液浸部を形成可能な第2部材と、所定部材と第2部材との間の第2液体に振動を与える振動発生装置とを備え、第2液体を用いて所定部材をクリーニングする。
(もっと読む)
光学式検査装置、検査システムおよび座標管理用ウエハ
【課題】欠陥座標に含まれている誤差を低減可能な光学式検査装置を提供する。
【解決手段】チャンネルが配列されたラインセンサと、ウエハをステージに載せてラインセンサに対して移動させる移動手段と、行列の行毎に1つ且つ列毎に1つ擬似欠陥ダイが形成され擬似欠陥ダイには複数の擬似欠陥が列方向に一列に形成されている座標管理用ウエハを検査したのを受けてチャンネル上に結像した擬似欠陥のステージ上の位置を擬似欠陥ステージ座標Xs0として検出するステージ位置検出手段と、擬似欠陥ステージ座標Xs0を擬似欠陥ダイ座標に変換する座標変換手段と、設計座標に対する擬似欠陥ダイ座標の差分ΔXを算出する差分算出手段と、擬似欠陥ステージ座標Xs0に対して差分ΔXが一定の振幅A1で振動し直線L1に沿って増加又は減少する座標誤差特性パターンCP1を取得する特性パターン取得手段とを有する。
(もっと読む)
ディンプル位置検出装置
【課題】ディンプル頂点の位置を正確に検出することができるディンプル位置検出装置を提供する。
【解決手段】ロードビームに形成されたディンプルの位置を検出するためのディンプル位置検出装置であって、ディンプルに向けて光を照射する照明装置と、その反射光を受光する撮像装置と、得られた画像を二値化する画像処理部とを備えている。画像処理部は、二値化レベルを最大にする手段S2と、反射光の画像を二値化する手段S3と、二値化レベルを超えた光点領域(オン領域)の面積が所定値であるか否かを判定する手段S4と、光点領域の面積が所定値未満のときに二値化レベルを下げる手段S6と、光点領域の面積が所定値に達したときに光点領域の重心の位置を算出する手段S8とを具備している。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
21 - 40 / 556
[ Back to top ]