
Fターム[2F065AA12]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | エッジ位置 (795)
Fターム[2F065AA12]の下位に属するFターム
長手方向連続的 (3)
Fターム[2F065AA12]に分類される特許
21 - 40 / 792
切断面の検出方法
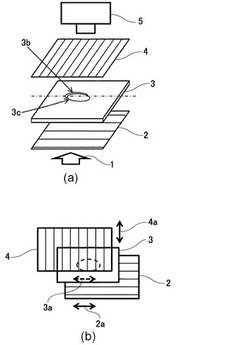
【課題】画像処理の負担を軽減し、容易かつ正確に切断面を区別することのできる、新規の切断面の検出方法を提供する。
【解決手段】第1の偏光フィルタ2の偏光方向2aを所定の方向に向けて第1の偏光フィルタ2の偏光方向2aと第2の偏光フィルタ4の偏光方向4aを直交させ、照明光1を第1の偏光フィルタ2を透過させ試料3の切断面3b,3cで反射させてから第2の偏光フィルタ4を透過させデジタルカメラ5により撮影して第1の画像を取得し、第1の偏光フィルタ2の偏光方向2aを所定の方向から45度傾かせて第2の画像を取得し、第1の偏光フィルタ2の偏光方向2aと第2の偏光フィルタ4の偏光方向4aを平行にして第3の画像を取得し、第1、第2、第3の画像を加算する。
(もっと読む)
検査装置及び方法

【課題】スポット溶接部の有無及び位置を精度良く計測することができる検査装置及び検査方法を提供する。
【解決手段】取得画像上のスポット溶接部を抽出する溶接部抽出部と、抽出したスポット溶接部の座標を算出する座標算出部9と、光線によって計測対象物上に指し示された3点以上の基準点を取得画像から抽出する基準点抽出部20と、抽出した取得画像上の基準点の座標を基に正対対象物に対する計測対象物の傾斜及び倍率のずれに起因する誤差を補正する補正値を算出する第1の補正値算出部21と、取得画像上の計測対象物の特徴量を抽出する特徴量抽出部22と、抽出した特徴量から計測対象物の蛇行及び撮像軸周りの回転に起因する誤差を補正する補正値を算出する第2の補正値算出部23と、補正値算出部21,23で算出した補正値によりスポット溶接部の座標を補正する座標補正部24とを備えている。
(もっと読む)
エッジ位置検出装置
【課題】帯状体の走行を継続させながら省スペースでメンテナンスを行うことができるエッジ位置検出装置を提供する。
【解決手段】帯状体10の一方の面側に、直線偏光を投射する投光器2と偏光フィルタを介して光を受光する受光器4とを配置し、帯状体10の他方の面側に、投光器2から投射される直線偏光が入射され、入射された直線偏光の偏光方向を偏光フィルタの透過軸に一致する方向に変化させて反射する偏光反射板3を配置する。そして、受光器4の各受光素子で得られた受光量が帯状体10の幅方向でする位置を検出し、その位置を帯状体10のエッジ位置として検出する。
(もっと読む)
シート体の縁部検出センサ
【課題】生地などのシート体の縁部を正確に検出することができる。
【解決手段】当接部材20と、当接部材20に面当接しているシート体Wへ向けて検出光を投光する投光部2と、投光部2が投光した検出光を受光する受光部3と、受光部3の受光量を基にシート体Wを検出する検出部35とを備え、投光部2は、シート体Wとその縁部Waから外れた外領域とにわたって検出光を投光できるように並設された複数の投光口2aを有し、受光部3は投光口2aに個別に対応する受光口3aを有し、検出部35は受光口3aに個別に対応する判断部を有している。
(もっと読む)
露光装置
【課題】
携帯機器向けのような小さい液晶製品の基板部品であっても、正確なマスクの位置を設定することができる。
【解決手段】
基板の画像情報を取得するために、マスク部に対して複数種の透過光を照射し、マスク部の透光窓を介して取得された透過光を画像情報に変換し、変換された画像情報において、マスク部の遮蔽線の幅は、所定の透過光を透過した、画面表示画面の隣り合う同一色の画素に対応するパターンの間に位置するパターンを覆うように設定されたものである。
(もっと読む)
貼り合せ板状体検査装置及び方法
【課題】貼り合せ板状体における板状体の縁端と接着剤の縁端との間の間隔を比較的容易に検査することのできる貼り合せ板状体検査装置を提供する。
【解決手段】ラインセンサカメラ50と、照明手段51と、照明手段51により照明がなされている状態で貼り合せ板状体10を走査するラインセンサカメラ50から出力される映像信号を処理する処理ユニットとを有し、処理ユニットは、映像信号に基づいて画素単位の濃淡値からなる検査画像情報を生成する検査画像情報生成手段と、検査画像情報から得られる第1板状体11の縁端を横切る検査ライン上の濃淡値プロファイルに基づいて、検査ライン上での第1板状体11の縁端と接着剤13の縁端との間隔を表す縁端間距離情報を生成する縁端間距離情報生成手段とを有し、縁端間距離情報に基づいた検査結果を提供する。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】部品91の三次元認識を正確に実行する。
【解決手段】互いに異なる場所から部品91を撮像した2枚の撮像画像I1、I2に対してステレオマッチング処理が実行されて、2枚の撮像画像I1、I2間の視差pを示す視差画像Isが取得される。また、撮像画像I1からエッジEが抽出されて、部品91のエッジEを示すエッジ画像Ieが取得される。そして、エッジ画像Ieが示す部品91のエッジE上の位置での視差pが、視差画像Isに含まれる視差pから抽出されるとともに、こうして抽出された視差pに基づいて、三次元における部品91の位置および姿勢が認識される。これにより、部品91のエッジE部分の視差pに基づいて、三次元における部品91の位置および姿勢を認識することが可能となり、その結果、この三次元認識を正確に実行することが可能となる。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
データ解析装置、データ解析方法、及びプログラム
【課題】地物表面の三次元形状を表す点群データに基づいて地物の壁面を自動的に検出する。
【解決手段】部分空間設定手段20は解析の対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち予め設定した閾値以上の高低差を有する点群を含むものを注目部分空間として選択する。ブロック空間設定手段24は注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する。水平面内探索手段26はブロック空間ごとに、水平面内の線分のうち、水平面に射影された点群が予め設定した基準以上に近傍に集まるものを探索して水平面内における壁面の位置と定める。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
ワーク位置検出システム
【課題】透明体であるワークの安定的な位置を検出することができるワーク位置検出システムを提供する。
【解決手段】透明体であるワークの端面が発光するように光を照射する少なくとも一つの投光部(21a〜21c)と、光によってワークの端面に生じた発光箇所を撮像する撮像部(22a、22b)と、撮像部による撮像結果に基づいてワークの位置を検出する検出部と、を有する。
(もっと読む)
動き検出装置
【課題】移動する測定対象物が加速、減速した場合であっても該測定対象物の速度を高精度に測定することが可能な動き検出装置を提供する。
【解決手段】撮像部11で撮像される画像の各画素に、測定対象物の測定対象物が存在した場合に、投票値を付与する。そして、積算された投票値が増加する場合には、測定対象物は減速しているものと判断し、他方、積算された投票値が減少する場合には、測定対象物は加速しているものと判断する。そして減速している場合には、特徴領域に対応する画素の投票値に、所定の補正値を加算することにより、実際の速度を反映した投票値に補正する。また、減速している場合には、特徴領域に対応する画素の投票値から所定の補正値を減算することにより、実際の速度を反映した投票値に補正する。
(もっと読む)
画像形成装置、パターン位置決定方法、画像形成システム
【課題】シート材の影響を抑制してテストパターンの位置を検出する画像形成装置を提供すること。
【解決手段】液滴の吐出タイミングを調整する装置100であって、テストパターンからの反射光を読み出す読み取り手段30と、均一パターンの印刷データを記憶する印刷データ記憶手段54と、均一パターンを記録媒体に印刷した後、テストパターンを均一パターン上に印刷するパターン形成手段52と、読み取り手段を等速で移動させる相対移動手段313と、テストパターンが形成された記録媒体に対し読み取り手段が相対移動しながら、テストパターンを光が横断する際に前記受光手段が受光した反射光の第1の検出データを取得する第1の検出データ取得手段617と、予め定められた上限値と下限値の間に含まれる第1の検出データにライン位置決定演算を施してテストパターンの位置を検出する位置検出手段616、を有する。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
情報処理システム及び情報処理方法
【課題】ユーザにとっての利便性により優れた情報処理装置及び情報処理方法を提供すること。
【解決手段】本技術に係る第1の側面である情報処理システムは、1つの検体を同一方向に切断することによって得られた複数の切片が離散的に載置されたスライドを撮影して得た画像データを取得する取得部と、前記取得された画像データにおける個々の前記切片を含む同一形状の複数の検体領域を検出して、個々の前記検体領域それぞれの前記画像データの座標空間における位置を相対的に示す位置情報を算出する検出部と、前記算出された位置情報を記憶する第1の記憶部と、前記記憶された位置情報をもとに前記検体領域間での表示の切り替えを行う制御部とを具備する。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
バーコード外観検査システム、バーコード外観検査方法
【課題】バーコードの外観不良を簡易に検査できるバーコード外観検査システム等を提供する。
【解決手段】バーコード外観検査システムの画像処理装置の制御部は、カメラで撮影されたバーコード6の撮影画像データを取得し、バーコード6のバー配列方向の両端部のエッジ65の位置と、バー配列方向の両端部の近傍におけるバー長さ方向の両端部のエッジ67a、67bの位置を算出する。続いて、これらエッジ65、67a、67bの位置に基づきバーコード6の中心座標等を演算して求め、これに基づきバーコード6の欠陥検出領域を生成する。次に、この欠陥検出領域において、バー長さ方向の微分フィルタ演算と演算結果の2値化を行い、バーコード6の汚れ61、抜け63等の欠陥領域を検出する。いずれかの欠陥領域の面積が所定値以上の場合に、画像処理装置の制御部は、バーコード6に外観不良があると判定する。
(もっと読む)
三次元計測装置、三次元計測方法およびプログラム
【課題】 計測誤差の校正が可能な三次元計測装置を提供する。
【解決手段】
所定のパターンを投影する投影部と、パターンが投影された被写体を撮像する撮像部とを有する三次元計測装置は、撮像部によって撮像された画像において、計測空間内の同一平面上に予め設定された複数のパターン検出領域に投影されたパターンの撮像画素面上の位置情報を検出する検出部と、位置情報を用いて、計測時前に予め検出した投影部の投影画素面上のパターンと計測時における投影部の投影画素面上のパターンとの対応関係を算出する対応関係算出部と、を有する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
21 - 40 / 792
[ Back to top ]