
Fターム[2F065AA12]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | エッジ位置 (795)
Fターム[2F065AA12]の下位に属するFターム
長手方向連続的 (3)
Fターム[2F065AA12]に分類される特許
41 - 60 / 792
情報処理装置及び情報処理方法
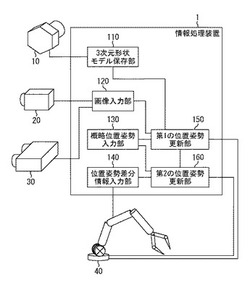
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
長さ測定装置

【課題】搬送中の長尺材の長さを精度よく測定することができる長さ測定装置を提供する。
【解決手段】長さ検出装置1は、搬送ライン2の搬送方向上流側に設けられた通過検出部3と、搬送方向下流側に設けられた位置検出部4と、長尺材の長さを算出する算出部5と、演算部5等を制御する制御部6を備えている。通過検出部3は、搬送ライン2に向けて投光する複数の通過投光部31と、搬送ライン2を挟んで通過投光部31と対向して設けられた複数の通過受光部32とをセットで具備している。位置検出部4は、搬送方向にほぼ直交する光を搬送ライン2に向けて投光し、該光を該搬送方向に平行走査する投光部41と、該投光部41と搬送ライン2を挟んで対向し、該投光部41からの光を受光する受光部42とを具備している。
(もっと読む)
画像計測装置及びコンピュータプログラム
【課題】計測結果が計測対象物のどの部分のどの計測結果であるのかを使用者が的確に把握することができる画像計測装置及びコンピュータプログラムを提供する。
【解決手段】撮像手段で取得した計測対象物の画像を表示し、表示された画像上で特徴画像、及び計測位置の指定を受け付ける。指定を受け付けた特徴画像と、計測位置及び該計測位置を示す寸法線の表示位置を表す、特徴画像に対する相対位置に関する情報とを記憶しておく。新たに取得した計測対象物の画像と記憶してある特徴画像とを照合し、計測対象物の画像の姿勢及び位置に関する情報を特定する。姿勢及び位置が特定された計測対象物の画像に対して計測位置を設定し、該計測位置のエッジ部分を検出して、所定の物理量を計測する。記憶された寸法線を表示する特徴画像に対する相対位置に関する情報に基づいて、計測位置を示す寸法線及び計測結果を所定の位置に表示する。
(もっと読む)
3次元計測方法
【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
抗菌加工品の抗菌性能の評価方法
【課題】抗菌剤の抗菌性能の評価に要する時間および費用を低減する。抗菌剤の抗菌性能の評価において、細菌培養を行うことなく間接的な方法によって簡易な評価方法を提供する。さまざまな形状の抗菌加工品の各部位の抗菌性能を評価する方法を提供する。
【解決手段】本願発明の抗菌の抗菌性能の評価方法は、抗菌剤の少なくとも一部が表面から露出してなる抗菌加工品の抗菌性能を評価する評価方法であり、抗菌加工品の表面上に設定した関心領域の画像を取得し、関心領域において表面から露出する抗菌剤の露出の程度を表す露出率を画像から求め、予め求めておいた露出率と抗菌加工品の抗菌性能との相関関係に基づいて、画像から求めた露出率に対応する抗菌性能を求め、求めた抗菌性能によって抗菌加工品の抗菌性能を評価する。
(もっと読む)
複数カメラの校正方法及び校正システム
【課題】カメラ校正における場所的な要求や演算負荷の要求をできるだけ低減し、車両の組み立てラインに組み込むことが容易となる、複数カメラの校正技術を提供する。
【解決手段】第1校正場の所定位置に当該車両を位置決めし、第1カメラによる基本撮影画像を取得し、基本撮影画像における基本校正指標群の画像上の位置である基本画像座標を算定し、基本校正指標群のワールド座標と基本画像座標との関係を表す第1校正関数を算定する。第2校正場に移動し、第1カメラによる第1撮影画像から第1画像座標を算定し、第2カメラによる第2撮影画像から第2画像座標を算定し、第1画像座標及び第1校正関数及び第1校正指標群のワールド座標を用いて車両姿勢ずれを算定する。車両姿勢ずれと第2画像座標と第2校正指標群のワールド座標とに基づいて、第2画像座標と第2校正指標群のワールド座標との関係を表す第2校正関数を算定する。
(もっと読む)
位置検出装置、位置検出方法及びコンピュータプログラム
【課題】検出対象の位置を精度良く検出する位置検出装置を提供する。
【解決手段】所定の位置で所定の向きに設置された撮像装置によって撮像された第一の画像から、検出対象に含まれる第一特徴点eye_2l及び第二特徴点eye_2rの平面座標の位置を検出し、第一特徴点及び第二特徴点の空間座標の位置を取得し、第一特徴点と第二特徴点との間の平面座標における距離と空間座標における距離との比を算出し、撮像装置によって撮像された第二の画像から、検出対象に含まれる第一特徴点及び第二特徴点の平面座標の位置を検出し、距離比と、第二の画像における第一特徴点及び第二特徴点の平面座標と、に基づいて第一特徴点及び第二特徴点の空間座標の位置を検出する。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
画像処理による渡り線測定装置
【課題】渡り線と背景の切り分けを高精度に行うことが可能な画像処理による渡り線測定装置を提供する。
【解決手段】車両の屋根上に設置されたラインセンサカメラ2と、車両の内部に設置された計測用コンピュータ3とを備えた画像処理による渡り線測定装置において、計測用コンピュータ3が、ラインセンサ画像作成部3aと、標準偏差背景除去処理部3bと、判別分析二値化処理部3cと、ノイズ除去処理部3dと、渡り線部エッジ検出部3eと、渡り線部高さ計算部3fと、渡り線部偏位計算部3gとを備えるようにし、ラインセンサ画像に対して標準偏差背景除去処理を行ったうえで二値化処理を行うことにより渡り線と背景との切り分けを行うようにした。
(もっと読む)
シート状部材の巻き付け状態の検査方法及び検査装置
【課題】成形ドラムに巻き付けられたシート状部材の巻き付け状態を精度良く測定する。
【解決手段】ドラム周方向Cに沿った検出範囲Dを持つ二次元レーザセンサ12を用い、成形ドラム50をドラム幅方向Xに移動させながら、成形ドラム50に巻き付けられたシート状部材70に対し、シート状部材70の全幅を含む範囲で二次元レーザセンサ12によりレーザ光Lを照射して、反射面までの距離データを取得し、得られた距離データに基づいてシート状部材70の幅方向両端部78,80の位置を求める。好ましくは、成形ドラム50の全幅を含む範囲で上記距離データを取得し、成形ドラム50の幅方向両端部62,64の位置も求めることである。また、シート状部材70の接合部76が二次元レーザセンサ12の検出範囲D内に入るように位置合わせした上で、上記距離データを取得して、接合部76を検査することが好ましい。
(もっと読む)
幅測定装置
【課題】安価でかつ信頼性の高い幅測定機能を有し、被測定物体の幅を高精度に測定することができる幅測定装置を提供する。
【解決手段】被測定物体1の上方より外側に配置され、その一方側にスリット状光を照射する光源2aと、そのスリット状光を撮像する一方側2次元撮像部4aと、被測定物体1の一端部28aの幅方向座標を演算する一端部幅方向座標演算部7aと、一端部高さ方向座標演算部8aと、一端部位置演算部9aと、被測定物体1の上方より外側でかつ光源2aと反対側に配置され、その他方側にスリット状光を照射する光源2bと、そのスリット状光を撮像する他方側2次元撮像部4bと、他端部28bの幅方向座標を演算する他端部幅方向座標演算部7bと、他端部高さ方向座標演算部8bと、他端部位置演算部9bと、一端部28aおよび他端部28bの空間位置に基づいて、被測定物体1の幅を演算する幅演算部10と、を備える。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】ラインセンサ画像中のトロリ線とトロリ線以外の物体とを切り分け、トロリ線摩耗面の誤検出を低減することを可能とした画像処理によるトロリ線摩耗測定装置を提供する。
【解決手段】車両の内部に設置された処理用コンピュータが、車両の屋根上に設置されてトロリ線を撮影するラインセンサカメラ2から入力される画像信号を時系列的に並べてなるラインセンサ画像を作成するラインセンサ画像作成部4aと、入力された画像に対してGSTH処理を行ってGSTH画像を作成するGSTH処理部4bと、入力された画像に対して二値化処理を行って二値化画像を作成する二値化処理部4cと、入力された画像に対してトロリ線の摩耗部分の両側のエッジを検出するトロリ線摩耗部エッジ検出部4dと、摩耗部分の両側のエッジの位置からトロリ線の摩耗量を検出するトロリ線摩耗部幅計算部4eとを備える構成とした。
(もっと読む)
変位量特定装置、変位量特定方法および変位量特定プログラム
【課題】基板の反りを簡易に検出することができる技術の提供。
【解決手段】電子部品を基板に実装するためのパッドの中から前記基板の反りを検出するための基準パッドを選択し、前記基板に反りが発生していない場合の前記基板の表面である基準平面に対して傾斜した方向に光軸が配向したカメラによって撮影された前記基準パッドの像を含む画像を取得し、前記基準パッドの像の前記画像内での位置と前記基板に反りが発生していない場合における前記基準パッドの像の前記画像内での位置である基準位置とに基づいて前記基準平面に垂直な方向への前記基板の反りの量を特定する。
(もっと読む)
画像位置検出装置と画像形成装置
【課題】画像端の位置を正確に検出することのできる画像位置検出装置と、この画像位置検出装置を備えた画像形成装置を提供する。
【解決手段】中間転写ベルト上に形成される補正用パターンのパターン画像の端部の位置を検出する位置検出装置であって、補正用パターンに向けて光を照射する発光部17Dと、このパターン画像の表面で正反射する正反射光を受光する正反射光受光部17Hsと、その表面で拡散反射する拡散反射光を受光する拡散反射光受光部17Hrとを備え、正反射光受光部17Hsの正反射光受光信号値と、拡散反射光受光部17Hrの拡散反射光受光信号値に一定係数を乗じた乗算値とに基づいてパターン画像の端部の位置を求める。
(もっと読む)
道路勾配推定装置
【課題】片側の白線のみからでも車両前方の道路の道路勾配を推定可能な道路勾配推定装置を提供する。
【解決手段】画像処理部4で抽出した白線が破線であるとき、その白線のペイント部分と非ペイント部分の境界である端点を抽出する端点抽出部6と、視点変換処理を行い、車両前方の道路の道路勾配が、車両が走行している位置での道路勾配で一定であると仮定したときの各端点の見かけ上の位置を求める視点変換処理部7と、隣り合う端点間の見かけ上の距離と、予め求めた隣り合う端点間の実際の距離とに基づき、各端点間の勾配を求める端点間勾配取得部9と、端点間勾配取得部9が求めた各端点間の勾配に、車両が走行している位置での道路勾配を足し合わせることで、端点間の実際の道路勾配を求める道路勾配演算部10と、を備えた。
(もっと読む)
ボトル缶のねじ部検査装置
【課題】ボトル缶のねじ部を正確かつ短時間で検査する。
【解決手段】ライナー付キャップを被嵌するために開口端を外方へ向かってカールさせたカール部1とカール部1の下方でキャップをねじ嵌合するねじ部2とからなる口金部3を有するボトル缶4を缶軸Xまわりに回転させながら、口金部3の一部を含むように設定された撮像エリアを撮像して口金部3におけるねじ部2の形状を検査する装置であって、ボトル缶4を保持して缶軸まわりに回転させる回転手段21と、撮像エリア内のボトル缶4のねじ部2に半径方向外方かつ缶軸方向下方から斜め上向きに照明光Aを照射するねじ部照明手段22と、撮像エリアにおける照明光Aの反射光A´を含む検査画像を連続的に取得する撮像手段24と、反射光A´の撮像結果に基づきねじ部2のねじ始まり部を検出し、ねじ始まり部を含むねじ部2の検査を行うねじ部検査手段25とを備える。
(もっと読む)
ステレオカメラ装置、ステレオカメラシステム、プログラム
【課題】2台のカメラで撮像した撮像画像の対応付けを容易にする。
【解決手段】2台のカメラ1、2は、光軸を平行にして配置される。カメラ1、2が撮像した撮像画像の画素の位置は、受光面に規定した2次元の直交座標である第1座標系で表される。また、実空間の点の位置は、カメラ1、2の光学中心を結ぶ第1方向と、カメラごとの光軸の方向である第2方向と、第1方向および第2方向に直交する第3方向との3軸の周りのそれぞれの角度によって表される。演算処理部10は、撮像画像を第1方向の軸周りの角度と第2方向の軸周りの角度とで位置が表される第1変換画像に変換する第1変換部101と、撮像画像を第1方向の軸周りの角度と第3方向の軸周りの角度とで位置が表される第2変換画像に変換する第2変換部102と、第1変換画像および第2変換画像を用いて視差を求める視差推定部103とを備える。
(もっと読む)
すき入れ位置検査方法
【課題】 すき入れ及び紙端を鮮明に撮像し、すき入れが施された位置をばらつきが生じることなく高い精度で測定する検査方法を提供する。
【解決手段】
あらかじめ紙端撮像ラインカメラの撮像条件を紙端が鮮明に撮れる撮像条件に設定し、すき入れ撮像ラインカメラの撮像条件をすき入れが鮮明に撮れる撮像条件に設定した後、各ラインカメラにおいて紙端画像とすき入れ画像とをそれぞれ取得し、紙端画像から紙端を示す座標を検出し、すき入れ画像からすき入れを示す座標を検出し、紙端の座標からすき入れの座標までの距離を算出した後、算出した各座標間の距離が許容範囲か否かを判定してすき入れが形成された位置の合否判定を行う。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
長尺材の測長方法及び装置
【課題】エンコーダの機械的不具合による測長異常をその場で検出し、大量の長さ不適合の発生を防止する。
【解決手段】透光する目盛2を付した定規1をラックレール12沿いに架設し、且つ定規1の目盛位置を測定する目盛位置測定器3を鋼管20長さ方向の一端側と他端側の各台車22に搭載しておき、一端側と他端側とでそれぞれ、台車22の移動の間、目盛位置測定器3による測定値とエンコーダによる測定値とを逐次比較し、両者の差が閾値超となったことを測長異常と同定する。
(もっと読む)
41 - 60 / 792
[ Back to top ]