
Fターム[2F065AA12]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | エッジ位置 (795)
Fターム[2F065AA12]の下位に属するFターム
長手方向連続的 (3)
Fターム[2F065AA12]に分類される特許
141 - 160 / 792
画像測定装置及び画像測定方法
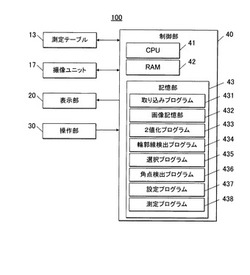
【課題】操作者の手間が少なく、測定を迅速且つ確実に行うことのできる画像測定装置及び画像測定方法を提供する。
【解決手段】ワークを撮像する撮像ユニット17と、撮像されたワークの画像を取り込む取り込みプログラム431と、取り込まれた画像を2値化する2値化プログラム433と、2値化された画像内に存在する図形情報を認識し、当該図形情報の輪郭線を検出する輪郭線検出プログラム434と、検出された輪郭線に基づいて図形情報の角点を検出する角点検出プログラム436と、検出された角点を含む輪郭線上に、エッジ検出ツールを設定する設定プログラム437と、設定されたエッジ検出ツールにより、図形情報の測定を行う測定プログラム438と、を備える。
(もっと読む)
測定設定データ作成装置、測定設定データ作成方法及び測定設定データ作成装置用のプログラム

【課題】 ワークの寸法を測定するための測定設定データを容易に作成することができる測定設定データ作成装置を提供する。
【解決手段】 形状線の位置情報、寸法線の位置情報、並びに、寸法線に関連付けられた設計値及び公差からなる設計値情報を含む設計データを取得する設計データ取得手段と、ワークを含むマスター画像に対し、測定対象箇所及び測定種別を指定するための測定対象箇所指定手段と、指定された測定対象箇所について、マスター画像からエッジを抽出するエッジ抽出手段と、抽出されたエッジに基づいて、測定対象箇所の寸法値を算出する寸法値算出手段と、算出された寸法値に近い設計値からなる設計値情報を設計データから抽出する設計値情報抽出手段と、指定された測定対象箇所及び測定種別からなる測定対象箇所情報、並びに、測定対象箇所に関連付けた設計値情報を含む測定設定データを生成する測定設定データ生成手段により構成される。
(もっと読む)
画像測定装置、画像測定方法及び画像測定装置用のプログラム
【課題】 複数のワークについて、輪郭の不一致度合いを容易に識別することができる画像測定装置を提供する。
【解決手段】 ワーク画像A2からエッジを抽出するエッジ抽出手段と、ワーク画像A2及び予め保持されたマスター画像A1を比較する画像比較手段と、比較結果に基づいて、ワーク画像A2のエッジ位置とこのエッジ位置に対応するマスター画像A1上の位置との変位量を示す誤差を算出する誤差算出手段と、複数のワーク画像A2について算出された誤差の統計情報をエッジ位置ごとに算出する統計情報算出手段と、統計情報を、その値に応じた表示態様でワーク画像A2又はマスター画像A1から抽出されたエッジ位置に沿って表示する統計情報表示手段により構成される。
(もっと読む)
画像測定装置、画像測定方法及び画像測定装置用のプログラム
【課題】 ワークのエッジ位置に沿って誤差を識別することができるとともに、ワーク画像との対応関係を容易に把握することができる画像測定装置を提供する。
【解決手段】 ワーク画像からエッジを抽出するエッジ抽出手段と、ワークの輪郭情報及び輪郭位置の公差を含む測定設定データを保持する測定設定データ記憶手段と、ワーク画像及び輪郭情報を位置合わせし、ワーク画像上のエッジ位置とこのエッジ位置に対応する輪郭位置との変位量を示す誤差を算出する誤差算出手段と、算出された誤差を公差と比較し、良否判定を行う誤差判定手段と、抽出されたエッジ及び良否判定の結果をワーク画像上に表示する測定結果表示手段により構成される。測定結果表示手段は、誤差が不良と判定されたエッジ位置について、誤差の大きさが極大となるエッジ位置の誤差を数値表示する。
(もっと読む)
画像計測方法及び画像計測装置
【課題】簡単な作業で、大型構造物の計測ができる画像計測方法及び画像計測装置を提供する。
【解決手段】計測対象物である圧力容器100をカメラ2で撮像して撮像画像を取得し、その撮像画像をカメラパラメータに基づいて補正し、補正した計測用画像から計測対象であるボルト孔101と同一平面上に存在する基準円150を抽出し、その基準円150からカメラ2の撮像位置を推定し、上記計測用画像から2つのボルト孔101を検出して、この検出した情報と撮像位置の情報に基づいて、2つのボルト孔101間の距離を算出する。
(もっと読む)
物体識別装置
【課題】差分偏光度を用いて撮像画像中における識別対象物の画像領域を識別することが困難な状況下であっても、その撮像画像中の識別対象物の画像領域を高い精度で識別することを課題とする。
【解決手段】撮像領域内のP偏光画像及びS偏光画像を偏光カメラ10で撮像し、画素ごとに、P偏光画像及びS偏光画像間における輝度合計値(モノクロ輝度)と、当該輝度合計値に対するP偏光画像及びS偏光画像間における輝度差分値の比率を示す差分偏光度を算出する。そして、差分偏光度が所定の差分偏光度閾値以上であれば、差分偏光度画像処理部15が算出した差分偏光度を用いて識別対象物である路端エッジ部を識別し、そうでなければ、モノクロ画像処理部13が算出したモノクロ輝度を用いて路端エッジ部を識別する。
(もっと読む)
測定設定データ作成装置、測定設定データ作成方法、測定設定データ作成装置用のプログラム及び寸法測定装置
【課題】 ワークの寸法を測定するための測定設定データを容易に作成することができる測定設定データ作成装置を提供する。
【解決手段】 形状線の位置情報、寸法線の位置情報、寸法線に関連付けられた設計値及び公差からなる設計値情報、並びに、寸法種別情報を含む設計データを取得する設計データ取得部21と、形状線の位置情報、寸法線の位置情報及び寸法種別情報に基づいて、寸法線を形状線によって規定される位置に対応づけることにより、形状線における測定対象箇所及び測定種別を特定する測定対象箇所特定部23と、形状線の位置情報に基づいて、ワーク画像からワークを検出するための特徴量情報を生成する特徴量情報生成部24と、特徴量情報、測定対象箇所情報、並びに、測定対象箇所に関連付けた設計値情報からなる測定設定データを生成する測定設定データ生成部25により構成される。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 複数のワークについて、相対的な位置関係を把握し易く、測定結果を容易に識別することができる寸法測定装置を提供する。
【解決手段】 特徴量情報、測定対象箇所情報及び設定値情報を保持する測定設定データ記憶部21と、ワークの位置及び姿勢をそれぞれ検出する配置状態検出部24と、ワーク画像A1から測定対象箇所のエッジを抽出するエッジ抽出部24と、抽出されたエッジに基づいて測定対象箇所の寸法値を算出し、測定対象箇所及びワークの良否判定を行う良否判定部25と、ワークの良否判定の結果をワーク画像A1上に表示する測定結果表示手段と、ワークのいずれかを選択するためのワーク選択部27により構成される。測定結果表示部26は、選択されたワークについて、測定対象箇所の良否判定の結果を表示する。
(もっと読む)
画像処理装置及び外観検査方法
【課題】 安定的に検査領域を特定することが可能な画像処理装置及び外観検査方法を提供する。
【解決手段】 濃淡画像を取得する濃淡画像取得手段110と、距離画像を生成する距離画像生成手段130と、濃淡画像と距離画像の一方の画像において、他方の画像上で検査範囲に相当する検査領域を特定するための特定パターンを検出する特定パターン検出手段150と、濃淡画像と距離画像の他方の画像において、特定パターン検出手段により検出された特定パターンの位置及び傾斜角度の少なくとも一方に基づいて、検査領域を特定する検査領域特定手段170と、特定された検査領域から特徴量を算出する特徴量算出手段180と、算出された特徴量に基づいて、ワークの良否を判定する判定手段190と、を備える。
(もっと読む)
車両間隔検出システム、車両間隔検出方法及び車両間隔検出プログラム
【課題】料金所内に前後車両が接近して入ってきたとき、前後車両の撮像画像から通信可否を判定する。
【解決手段】前方車両の前部画像を撮影する車両撮影手段11と、撮影された画像などから車両を検出する車両検出手段21と、撮影された前方車両の前部画像に映るフロントガラス底辺の画像位置に基づき前記無線受信器から前記前方車両のフロントガラス底辺までの水平距離の他、フレームレートとガラス底辺画像の変化から速度を求める距離演算手段22と、前方車両の車両サイズ(車両長さ,後部高さ)を取得する車両サイズ取得手段23と、前方車両の速度と水平距離+車両長さとを用いて、前後車両の車間距離を推定し、後続車両でのDSRC通信による料金収受データの受信不可(隠れ)を判定する隠れ発生有無判定手段24とを備えた車両間隔検出システムである。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
位置姿勢計測装置、その計測処理方法及びプログラム
【課題】
計測対象物体の位置及び姿勢に関する複数の計測手法の中からいずれかを選択して実施する。
【解決手段】
位置姿勢計測装置は、撮像装置により撮像された計測対象物体の二次元画像を入力し、距離センサにより計測された計測対象物体の距離データを取得し、二次元画像から計測対象物体の画像特徴を検出し、計測対象物体の状態を判定し、当該判定した状態に基づいて、画像特徴と距離データとを用いて計測を行なう第1のモードと、画像特徴と距離データとのうち一方のみを用いて計測を行なう第2のモードとを含むモードの中からいずれかのモードを設定し、当該設定したモードに従って計測対象物体の位置及び姿勢の計測を行なう。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
二次元測定機
【課題】電力消費量が少なく高熱の発生を伴わずに太陽光に近い白色光で被測定物を照明できる照明手段を備えた二次元測定機を提供する。
【解決手段】
テーブル12に載置した被測定物Wに対して垂直を保持したままX−Y方向に自在に移動する顕微鏡一体型CCDカメラ30と、顕微鏡光学系と同軸状の被測定物照明手段と、を備えた二次元測定機で、前記照明手段を、顕微鏡20の鏡筒21内のハーフミラー24と、ハーフミラー24に対応する鏡筒21側方延長位置に配置したクロスプリズム54と、該クロスプリズム54を取囲んで配置した赤,青,緑の単色LED52R,G,Bで構成し、単色LED52R,G,Bの発光がクロスプリズム54で合成されてハーフミラー24に導かれる。単色LED52R,G,Bの同時点灯で、太陽光に近い十分な光量の白色照明光が得られ、モニタ画面に映し出されるカラー画像が非常に見易い。照明用光源の電力消費量,発熱量が小さく、省エネルギー対策にも合致する。
(もっと読む)
半導体ウェハを検査するための方法および半導体ウェハのエッジを検査するための装置
【課題】半導体ウェハを検査するための方法および装置を提供する。
【解決手段】本発明は半導体ウェハを検査するための方法に関する。半導体ウェハのエッジをイメージング方法を用いて検査し、エッジ上の欠陥の位置および形状をこのようにして求める。加えて、その外縁がエッジから10mm以下である、半導体ウェハの平坦領域上の環状領域を、光弾性応力測定によって検査し、上記環状領域の中で応力を受けた領域の位置をこのようにして求める。欠陥の位置および応力を受けた領域の位置を互いに比較し、欠陥をその形状および光弾性応力測定の結果に基づいてクラスに分類する。本発明はまたこの方法の実施に適した装置に関する。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部103と、精度を高めるために点群データの再取得の要求を行う点群データ再取得要求処理部106を備えている。
(もっと読む)
パターンマッチング方法,画像処理装置、及びコンピュータプログラム
【課題】本発明は、エッジの変形、或いはコントラストの変動等に依らず、高精度にパターンマッチングを行うパターンマッチング方法,画像処理装置、及びコンピュータプログラムの提供を目的とする。
【解決手段】上記目的を達成するための一態様として、以下に設計データに基づいて形成されたテンプレートを用いて、画像上でパターンマッチングを実行するパターンマッチング方法、或いは装置であって、パターンの輪郭を定義する線分によって、区分けされる内側領域、及び/又は外側領域について、画像の特徴量を求め、当該特徴量が所定の条件を満たした位置をマッチング位置,マッチング位置候補、或いは誤ったマッチング位置と決定するパターンマッチング方法、及び装置を提案する。
(もっと読む)
粒子及び液滴の形状・径と温度との同時計測システム並びにそのプログラム
【課題】微粉炭等の固体の燃料粒子のみならず、液体の燃料液滴の燃焼場における挙動を把握するための基礎データを得るべく粒子または液滴の形状・径と温度との同時計測システムを提供する。
【解決手段】2本のレーザー光L1,L2の交差点に形成される測定領域を通過する火炎B中の粒子Pでレーザー光L1,L2が遮光されることにより形成される影に基づく粒子Pの形状をシャドウドップラー光学系Iを介して撮影するとともに、粒子Pの形状を表す画像信号を送出する高速度カメラ5と、カセグレン光学系IIを介して得られる測定領域中の粒子Pによる特定波長の2種類の光強度Iλ1,Iλ2をそれぞれ表す発光信号を送出する分光器8と、前記画像信号を処理して粒子Pの全部が高速度カメラ5の撮像画面に取り込まれている期間である測定可能期間を検出するとともに、前記測定可能期間に対応する前記発光信号に基づき二色温度計の原理により粒子Pの温度を演算するパソコン6とを有する。
(もっと読む)
画像位置決め測定方法
【課題】 本発明は、画像処理による位置決め測定方法の安全かつ簡便化と操作容易化を図り、画像位置決め測定装置の小型化・高精度化を図ったものである。
【解決手段】 顕微鏡、オートフォーカスユニット、門型のステージ計測ユニット6、パソコン、防振台、直動基準スケール、直動基準スケール治具、回転用基準スケール、回転用基準スケール治具で構成される画像位置決め測定装置を用いて、計測したい製品を門型のステージ計測ユニットに載置し、基準スケールと基準スケール治具をステージの上に置き、ステージを動かしながら基準スケール治具で基準スケールとステージの平行出しを行ない、基準スケールに記載されている目盛線のメモリーのピッチ間を画像処理により計測して基準寸法を決め、それに基づきステージの「位置決め精度」、「繰り返し位置決め精度」、「バックラッシュ」、「XY直交度」、「平行度」などの測定をし、測定項目ごとに画像処理により連動もしくは手動操作で計測を行なう画像位置決め測定方法。
(もっと読む)
貼合わせ基板の位置ズレ検出装置およびそれを用いる半導体製造装置ならびに貼合わせ基板の位置ズレ検出方法
【課題】円板状の2組の基板を上下に積層して成る貼合わせ基板において、素子形成などにあたって、基板中心位置のズレ量を一括して求められるようにする。
【解決手段】輪郭測定手段3によって、貼合わせ基板2の厚み方向の投影像から2組の基板21,22を合わせた輪郭形状を検出する一方、エッジ形状測定手段4によって、周方向の複数点において、貼合わせ基板2の接線方向の投影像から2組の基板21,22それぞれのエッジ形状を検出する。そして、演算手段6が、輪郭測定手段3の検出結果から、いずれか一方の組の基板の形状データを検出し、直径および中心位置を求める一方、他方の組の基板については、その一方の組の基板の形状データを基準に、エッジ形状測定手段4で検出された2組の基板間の相対的な位置関係から、形状データを求め、直径および中心位置を求める。その後、2組の基板間の中心位置の距離から、前記ズレ量を求める。
(もっと読む)
141 - 160 / 792
[ Back to top ]