
Fターム[2F065AA12]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | エッジ位置 (795)
Fターム[2F065AA12]の下位に属するFターム
長手方向連続的 (3)
Fターム[2F065AA12]に分類される特許
61 - 80 / 792
アンテナ位置判定装置
【課題】 2種類のレーザセンサを組み合わせて使用し、複雑な計測を行うことなく、アンテナの放射部が基準位置に入っているか否かを判定させることで、簡易な構成によるアンテナ位置判定装置を提供することを目的とする。
【解決手段】 固定治具にアンテナが固定された後、第1透過型レーザセンサ部及び第2透過型レーザセンサ部並びに複数の反射型レーザセンサ部を制御してレーザ光を発光させ、第1透過型レーザセンサ部及び第2透過型レーザセンサ部が遮光を検知し、複数の反射型レーザセンサ部が導出した距離が適正距離であるときに、放射部が基準位置に配置されていると判定し、第1透過型レーザセンサ部又は第2透過型レーザセンサ部の少なくとも一方が透過を検知したとき、又は、複数の反射型レーザセンサ部が導出した距離が適正距離でないときに、放射部が基準位置に配置されていないと判定するアンテナ位置判定装置。
(もっと読む)
封止容器の検査方法及び検査装置

【課題】目視に頼っていた封止容器のリッドの位置ずれ検査を光切断方式を用いて自動化する方式と検査装置を提供する。
【解決手段】パッケージ36にリッド37を接合した封止容器の上面へスリット光を照射し、スリット光に対し封止容器を相対的に移動させて封止容器の複数箇所にスリット光を照射し、パッケージ36の厚みにより分離したスリット光の端点の位置情報を光切断方式を用いて測定し、測定した平面方向の位置情報と予め定めた基準値とを比較する事によりパッケージ36に対するリッド37の位置ずれと傾きを判断する。
(もっと読む)
三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム
【課題】三次元点群位置データの処理の途中経過を知ることができる技術を提供する。
【解決手段】三次元レーザースキャナが測定した三次元点群位置データ(S502)に基づき、解像度を段階的に変えた三次元モデルを作成する(S505)。この際、低解像度の三次元モデルの作成およびその表示(S506)、さらにその後に、ラベリングされたデータを引き継いで(S509)の高解像度の三次元モデルの作成およびその表示を行う。ここで、低解像度の三次元モデルの表示を行うことで、最終的な三次元モデルの完成の途中の段階をユーザが把握することができる。
(もっと読む)
アクチュエータの行程位置検知装置
【課題】パターンが経年劣化等の変化することにより、位置検知用のセンサからの出力信号が変化したとしても、行程位置を把握することができるアクチュエータの行程位置検知装置を提供する。
【解決手段】油圧シリンダ1(アクチュエータ)のロッド4に、ストローク方向の範囲内において変化がない基準部とストローク位置を特定できるように変化させる符号化部とを有するパターンXを描画して、基準部を検知する基準センサ(基準検知部)が出力する基準信号に基づき位置検知センサ(位置検知部)が出力する位置信号を判断して、ストローク位置を把握する制御装置とを備える。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法
【課題】 従来の2次元画像と距離画像を併用した場合の位置姿勢計測手法に比べて、複雑背景下であっても高速かつロバストに位置姿勢を計測すること。
【解決手段】 2次元画像対応探索部140は、撮像画像中における仮想物体の幾何特徴と、撮像画像中に映っている現実物体において該幾何特徴に対応する特徴部分と、の対応付けを行う。対応探索領域設定部150は、仮想物体を構成するそれぞれの図形を距離画像上に投影し、該投影された図形の領域から、特徴部分に対応する距離画像内の部分の周辺を省いた残りの領域を、対応探索領域として設定する。位置姿勢算出部170は対応探索領域内の画素の奥行き値が示す位置と該画素に対応する仮想物体上の位置との3次元空間における距離、幾何特徴と特徴部分との3次元空間における距離、を表す評価関数を最小化するように位置姿勢情報を繰り返し更新する。
(もっと読む)
ビードスティフナーの検査方法及び検査装置
【課題】ビードスティフナーの接合部分の検査において、基準形状と比較することなくビードスティフナーの形状を正確に測定して良否判定の精度を向上させるビードスティフナーの検査方法及び検査装置を提供する。
【解決手段】環状のビードコアと、帯状に成形され、延長方向の端部と端部とを互いに接合させてビードコアの外周に巻きつけられたスティフナーとを有するビードスティフナーの良否を判定する検査方法であって、ビードスティフナーの断面形状の形状データを取得する工程と、形状データからビードコアの頂点を検出する工程と、頂点から指定された領域内にスティフナーの端部の有無を検出する工程とを含み、スティフナーの端部の有無に基づいてビードコアとスティフナーとの接合の良否を判定する。
(もっと読む)
基板の外観検査装置および外観検査方法
【課題】微小な電子部品であっても、その外形を示すエッジを正確に検出することができる基板の外観検査装置および外観検査方法を提供する。
【解決手段】照明パターン選択手段(照明パターン選択部47)は、複数の方向からの照明光を同時に照射する照明パターン1と、照明パターン1よりも高い輝度で複数の方向からの照明光を別々に照射する照明パターン2と、から照明光照射手段(照明20)による照明光の照射パターンを選択し、画像取得手段(カメラ10)は、照明パターン2が選択された場合には、別々に照射された複数の方向別の照明光毎に画像を取得する。このようにして取得した画像には、電子部品の実装面に略平行な面(上面)および実装面に略垂直な面(側面)により形成されるエッジが、電子部品の側面からの拡散光によって電子部品の外形として表され、エッジ検出手段(エッジ検出部48)はこれらの画像から電子部品の外形を示すエッジを検出する。
(もっと読む)
マシンビジョンシステムにおける潜在的な干渉要素の検査
【課題】マシンビジョンシステムにおける潜在的な干渉要素の検査を提供する。
【解決手段】マシンビジョン検査システムにおいて使用するためのロバストなビデオツールが提供される。ロバストなビデオツールには、関心領域と、ユーザインターフェースと、エッジ検出動作と、関心領域において検出されたエッジ点を含むと同時に除外領域におけるエッジ点を除外する現在の要素のエッジ点セットを決定する除外領域動作と、が含まれる。除外領域は、少なくとも1つの予め特徴付けられた要素、すなわち、予め特徴付けられた要素のエッジ点を検出し、かつ予め特徴付けられた要素の寸法パラメータを特徴付けるビデオツールを用いることによって特徴付けられる要素である少なくとも1つの予め要素付けられた要素に基づいて、除外領域ジェネレータによって決定される。
(もっと読む)
膜厚分布測定装置および塗膜形成装置
【課題】生産性を低下させることなく、帯状基材に塗膜を精度よく形成することができる塗膜形成装置を提供する。
【解決手段】塗膜形成装置は、帯状基材10を搬送するローラ70と、帯状基材10の長さ方向に塗膜を形成する塗工部とを備えた塗膜形成装置である。この装置は、帯状基材10の幅方向に沿って一直線上に配置された複数の変位センサ20A、20Bと、複数の変位センサ20A、20Bを帯状基材10の幅方向に走査させることによって、帯状基材10に形成された塗膜12の膜厚分布を測定する膜厚分布測定部100と、膜厚分布測定部100で測定された塗膜12の膜厚分布に基づいて、塗工部によって帯状基材10に形成される塗膜12の位置、塗膜の幅および塗膜の厚さをそれぞれ制御する制御部とを備える。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の摩耗量や偏位量を正確に測定する。
【解決手段】架線検測車屋根上にトロリ線へ投光する光を照射する投光ユニットを設け、トロリ線より反射した光を受光する受光ユニットを設ける。受光ユニットより受光した信号を二値化回路によってある閾値で二値化し、エッジ検出回路でパルス波形の立ち下がりから次の立ち上がりまでの距離に基づいて、剛体やイヤーなどのノイズ信号とトロリ線の信号を判別し、トロリ線摺面の検出信号を得る。エッジ検出回路から得られた検出信号は、演算装置によって前回の偏位データと今回の偏位データが比較され、前回のものと最も近い信号をトロリ線データとして検出し、トロリ線摩耗量(残存直径)に変換される。これによって、ノイズによる誤検出を低減させ、トロリ線の外形を正確に求める。
(もっと読む)
画像処理方法
【課題】複数個束ねられた偏平状態の段ボール箱の接合間隔を検査するために、検査画像に含まれる接合間隔の位置を高い精度で特定することが可能な画像処理方法を提供する。
【解決手段】境界検出ステップS1で、撮影画像における段ボール箱積層体の側面部分と背景部分との境界位置を検出し、濃度補正ステップS2で、検出された境界位置によって特定される段ボール箱積層体の側面部分を対象として濃度補正処理を行う。投影ステップでは、濃度補正処理が行われた側面部分に対して、積層方向に直交する方向に投影処理を行うことで、積層方向に直交する方向の1次元濃度データを得る。組み合わせ検出ステップで、1次元濃度データに対して、濃度が低下する範囲である谷部分とこの谷部分に隣接する、濃度が上昇する範囲である山部分との組み合わせを検出すると、決定ステップS4で、検出された組み合わせの中心位置を求め、接合間隔列の中央位置として決定する。
(もっと読む)
組立品検査装置および方法
【課題】各検査員の主観的判断に依拠するために生じる検査結果のバラツキをなくし、常に客観的な判断基準で検査を行える組立品検査装置および方法を提供する。
【解決手段】組立中子11を搬送軌道の搬送方向に沿って搬送する搬送装置53と、組立中子11の上側部をなす上部中子13の搬送方向に沿った複数箇所に設けた搬送方向に延びる上側エッジ部52a、52bおよび各上側エッジ部52a、52bに対応する位置で、かつ組立中子11の下側部をなす下部中子12の搬送方向に沿った複数箇所に設けた搬送方向に延びる下側エッジ部51a、51cとを検出するセンサ装置54と、センサ装置54で検出した上側エッジ部52a、52bと下側エッジ部51a、51cとの相対距離を搬送方向に沿った複数箇所の上側エッジ部52a、52bと下側エッジ部51a、51cの間において算出するコントロール部55を備えた。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の偏位量を正確に測定する。
【解決手段】トロリ線測定装置は、トロリ線に向けて光を投光し、その反射光を受光することによってトロリ線の外形を測定する。このトロリ線の外形を測定する際に、剛体電車線区間では剛体部やイヤー部からのノイズが多く正確に測定することが困難である。そこで、このトロリ線測定装置は、剛体電車線区間でトロリ線及びその近傍の電車線設備(剛体部及びイヤー部)の画像を撮影し、撮影された画像に基づいて電車線設備の偏位を測定し、その測定結果をトロリ線の外形の測定に反映させるようにした。
(もっと読む)
3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラム
【課題】本発明は、簡易な構成で、エッジ部分の画像解析により対象体の3次元位置・姿勢認識が可能な3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、第1画像と、第2画像とのうち少なくとも一方に撮像された対象体1の画像要素を解析し、対象体1におけるエッジの方向を検出する検出手段4と、検出結果に基づいて、第1撮像手段2及び第2撮像手段3のうち少なくとも一方と対象体1との相対位置を変化させるか否かを判断する判断手段5と、第1撮像手段2及び第2撮像手段3のうち少なくとも一方を、対象体1に対して相対的に移動させる移動手段6とを備えることを特徴とする。
(もっと読む)
コンクリート表面の閉合ひび割れ検出方法
【課題】コンクリート表面を撮像した元画像データを画像処理して閉合ひび割れを自動的に抽出する。
【解決手段】上下左右の矩形の処理領域を一般的に想定される閉合ひび割れのサイズをカバーする面積だけオーバーラップするように分割した複数の矩形の処理領域の元画像に対して画像処理を行い、撮影解像度以上のサブピクセル精度でひび割れ線分を抽出し、領域解析により一定以下の面積の微粒子を除去し、近接する線分同士を連結して閉合領域を生成する。全ての領域に対してラベル付けを行い、各領域の上下左右の端部の座標値が前記矩形の処理領域の範囲内にあるか否かを判定し、範囲内ならば閉合ひび割れと決定する。
(もっと読む)
落射照明画像用のエッジ位置測定値補正
【課題】 落射照明画像用のエッジ位置測定値補正を提供する。
【解決手段】 精密マシンビジョン検査システムにおける落射照明画像エッジ位置誤差を補正するための方法が開示される。方法には、落射照明光および透過照明光を用いてワークエッジ特徴のエッジ位置測定値を比較することが含まれる。透過照明光を用いたエッジ位置測定値は、落射照明より不確実性が低い。位置補正係数が、2つのエッジ位置測定値間の差から決定され得る。位置補正係数は、落射照明光を用いて取得された画像に基づく後続のエッジ位置測定値を補正するために記憶してもよい。いくつかの実施形態において、位置補正係数は、複数のエッジ用のエッジ位置測定値の比較に基づいて決定してもよい。
(もっと読む)
平坦度検出装置、および平坦度検出方法
【課題】簡単な構成で容易に平坦度を検出可能な平坦度検出装置、および平坦度検出方法を提供する。
【解決手段】平坦度検出装置1は、三次元測定装置2から計測データを取得する計測データ取得手段141と、検査対象計測面上の第一計測点を取得する第一計測点取得手段143と、第一計測点から検査対象計測面の幾何形状式を算出する第一形状算出手段144と、計測データから隣接計測面に属する第二計測点を取得する第二計測点取得手段145と、第二計測点から隣接計測面の幾何形状式を算出する第二形状算出手段146と、検査対象計測面および隣接計測面の交線または交点を算出する外周縁算出手段147と、交線または交点に基づいて補正検査対象計測面の幾何形状式を算出する補正計測面算出手段148と、補正検査対象計測面の幾何形状式に基づいて検査対象面の平坦度を検出する平坦度検出手段149と、を具備した。
(もっと読む)
エッジ検出装置及びそれを備えた画像形成装置
【課題】検出手段の光源の発光波長や記録媒体の反射率特性に依存することなく、様々な種類の記録媒体のエッジを短時間で正確に検出する。
【解決手段】移動している記録媒体Sの端部を検出するものであって、記録媒体Sよりも反射率の高い反射面31aを備えた反射手段31と、記録媒体S及び前記反射手段31の反射面31aに光を照射する光源と、記録媒体Sの幅方向に配列された光電変換素子画素を有し、光源から照射されて記録媒体S及び反射手段31の反射面31aで反射された反射光を光電変換素子画素で受光する受光手段と、受光手段において、予め設定された判定閾値よりも高い出力をする光電変換素子画素の領域を記録媒体SのエッジSaとして判定する制御手段を有する。
(もっと読む)
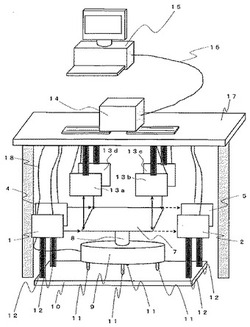
エッジ検出装置
【課題】金属粗面上におけるエッジの検出が可能であるエッジ検出装置を提供する。
【解決手段】フォーカス検出部150を備え、被測定物6を照射光ビームがスキャンしながら、かつ被測定物と投光系110との間の距離を変化させることで、被測定物にて反射した反射光を分割光検出器にて、複数回、検出を行う。得られた複数の反射光信号の振幅に着目し、振幅が最大となる場合の投光系の照射方向位置を求めることで、被測定物に対する投光系の合焦位置を検出する。このような合焦状態において、被測定物を光ビームでスキャンすることで、エッジ検出部160は、被測定物のエッジを検出する。
(もっと読む)
61 - 80 / 792
[ Back to top ]