
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
201 - 220 / 978
渦電流測定あるいは光学測定を利用して、メタライゼーション処理を実状態で監視する方法
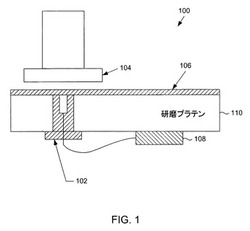
【課題】サンプルに形成された薄膜の除去工程中に該薄膜に関する情報を、渦電流プローブを使用して実状態で取得する方法を開示する。
【解決手段】渦電流プローブに検出コイルを設ける。渦電流プローブの検出コイルに交流電圧を印加する。渦電流プルーブの検出コイルがサンプルの薄膜に近接したときには、該検出コイルで第1の信号を測定する。該検出コイルが、既知の組成を有しおよび/または該コイルから離れて設けられた基準部材に近接する位置にあるときには、該検出コイルで第2の信号を測定する。第1の信号に含まれる利得及び/又は位相の歪みを第2の信号に基づいて校正する。校正した第1の信号に基づいて薄膜の特性値を決定する。上述の方法を実行する装置を更に開示する。加えて、研磨剤でサンプルを研磨し、このサンプルを監視する化学機械研磨(CMP)システムを開示する。このCMPシステムは、研磨テーブルと、研磨テーブル上でサンプルを保持する構成であるサンプルキャリヤと、渦電流プローブとを含む。
(もっと読む)
回転体位置測定方法

【課題】回転体の位置を高精度に測定する。
【解決手段】回転体6の回転軸に垂直な平面に対して傾斜角度θで反射ミラー8を回転体6に取り付けて、干渉測長手段である光学ユニット10から回転体6の回転軸に沿って照射される入射光20aを反射ミラー8によって反射させて干渉縞を得る。入射光20aの光路を回転軸から径方向にずらした距離Rと、入射光20aの波長λと、傾斜角度θとの関係が、0.4λ<2Rsinθを満たすように設定することで、サイクリックエラーによる測長誤差を低減する。
(もっと読む)
基準格子、基準格子の使用方法、及び、基準格子を備える光干渉断層画像診断装置
【課題】光干渉断層画像診断を精度よく行うのに好適な基準格子等を提供する。
【解決手段】本発明に係る基準格子100は、光干渉断層画像の診断に用いられる基準格子であって、光を透過する部材から構成され、当該部材に複数のグリッド線110を備え、複数のグリッド線110は、光干渉断層画像に表示される。そして、基準格子100を対象物に固定し、基準格子100及び対象物に低干渉光を照射し、当該基準格子100及び当該対象物により当該低干渉光が反射された反射光に基づいて、当該基準格子100及び当該対象物を測定し、基準格子100が備えるグリッド線110間の測定寸法と当該グリッド線110間の実寸法との差に基づいて、測定された対象物の測定寸法に含まれる誤差を特定する。
(もっと読む)
波面操作および改良3D測定方法および装置
【課題】光学システムにおいて、位相および振幅情報を含む波面分析、ならびに3D測定を実行する方法および装置、特に、光学システムの画像面のような、中間面の出力の分析に基づく方法および装置を提供する。
【解決手段】 薄膜コーティング、または多層構造の個々の層が存在する表面トポグラフィの測定について記載する。多重波長分析を、位相および振幅マッピングと組み合わせて利用する。マクスウェルの方程式の解に基づき、仮想波面伝搬を用いて、波面伝搬および再合焦によって位相および表面トポグラフィの測定を改良する方法について記載する。このような位相操作方法によって、または広帯域およびコヒーレント光源の組み合わせを利用する方法によって、光学撮像システムにおいてコヒーレント・ノイズの低減を達成する。本方法は、集積回路の分析に適用され、コントラストを高めることにより、または1回のショット撮像における3D撮像によってオーバーレイ測定技法を改善する。
(もっと読む)
デプスカメラの互換性
奥行き画像コンシューマーと複数の異なる奥行き画像プロデューサーとの間の互換性が、奥行き画像コンシューマーとの互換性がないサポートされていないデプスカメラパラメーターを有する固有の奥行き画像を受信し、当該固有の奥行き画像を、奥行き画像コンシューマーと互換性のあるサポートされた仮想デプスカメラパラメーターを有する仮想的な奥行き画像へと変換することによって提供される。この仮想的な奥行き画像は奥行き画像コンシューマーへ出力される。 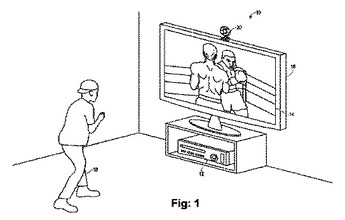 (もっと読む)
(もっと読む)
マシンビジョン検査システム用の光学収差補正
【課題】 マシンビジョン検査システム用の光学収差補正を提供する。
【解決手段】 光学収差に対して表面高さ測定値を補正するためのシステムおよび方法が提供される。オートフォーカスツールによって決定される高さは、焦点関心領域(ROI)における表面特徴角度および視野におけるROI箇所に依存し得るが、新しい誤差校正に基づいて補正される。誤差校正データには、画像における異なる特徴角度用の、および視野における複数の箇所用の高さ補正値が含まれる。高さ補正値は、例えばROIにおいて決定された勾配(エッジ)角度分布に基づき、角度依存性の誤差校正データを重み付けし、組み合わせることによって決定される。視野における複数のROI用にZ高さが決定されると、グローバル画像スタックの特定の画像からの画像データの記憶は、特定の画像が、十分に合焦された「近ピーク」焦点画像であるかどうかを、処理の初期に決定することに基づいて、効率的に制御することが可能である。
(もっと読む)
カメラ用校正儀およびその使用方法
【課題】大きな校正儀であっても、その製作、運搬、設置、撤去における負担を軽減し得るカメラ用校正儀を提供し、さらに、カメラから離れた位置に校正儀を配置する際に、カメラの解像度による精度低下を適切に防ぎ得るカメラ用校正儀の使用方法を提供する。
【解決手段】このカメラ用校正儀は、平面視が多角形形状に形成された板状の校正儀片を複数備えており、各校正儀片は、その色彩が異なる二種類以上からなり、また、その多角形形状の少なくとも2辺に、隣接する校正儀片と相互に嵌脱可能な嵌合部をそれぞれ有している。そして、このカメラ用校正儀を使用する際には、複数の校正儀片を相互に組み立てて市松模様を構成する。その組み合わせパターンや大きさは、空間的な制約や、カメラとの位置関係に応じて適切に変える。
(もっと読む)
二面の平行度を測定する方法及びそれに用いる光学系
【課題】向かい合う二面の平行度あるいは角度を秒オーダの精度にて非接触で、安価に、かつ簡易的に、かつリアルタイムに測定できる方法及びそれに用いる光学系を提供する。
【解決手段】光反射性とした第一被測定面5と、光反射性とした第二被測定面6に対し、ミラー8を第二被測定面に垂直に配置し、半透過部材10を第二被測定面6及びミラー8のいずれに対しても45度の角度になるように配置し、入射光ビーム24が半透過部材10を通過し、ミラー8で反射され、再び半透過部材10を通過して入射方向へ戻る光の角度を測定し、入射光ビーム24が半透過部材10を通過し、ミラー8で反射され、半透過部材10で第二被測定面6方向に向かい、第二被測定面6で反射され、半透過部材10を通過し、第一被測定面5で反射され、そして半透過部材10で反射されて入射方向へ戻る光の角度を測定し、得られた二つの角度から、被測定面5,6の角度差を測定する。
(もっと読む)
マルチフォーカス検査装置及びマルチフォーカス検査方法
【課題】 マルチフォーカス検査装置及びマルチフォーカス検査方法に関し、1回のスキャンで高速且つ高精度の全面外観検査を可能にする。
【解決手段】 測定対象物を撮像する測定ヘッドと、前記測定対象物と前記測定ヘッドを平面内において互いに相対的に移動させる移動機構と、前記測定対象物に光を照射する光源とを備え、前記測定ヘッドは、前記測定対象物に対向して配置された撮像レンズと、前記撮像レンズの合焦面が、前記測定対象物の移動方向に対して直交する平面内或いは前記直交する平面から±45°の範囲内で前記測定対象物の移動方向に傾斜させた平面内に存在するように調整する光学部材と、前記光学部材からの光の結像位置に焦点面が位置するよう配置したイメージセンサとを少なくとも有する。
(もっと読む)
形状検出装置
【課題】ウェハの外周端部を全周にわたって短時間のうちに形状検出できる形状検出装置を提供する。
【解決手段】形状検出装置1は、ウェハ保持部20に支持されたウェハ10の外周端部形状を検出する装置であって、ウェハ10の外周端部に対して径方向外側の所定位置に配置されて外周端部を照明する拡散照明部35と、ウェハ10の表面に直交する方向に配置されて外周端部に対向し、拡散照明部35から照射されて外周端部において反射した反射光の径方向に沿った輝度情報を検出する撮像部30と、撮像部30において検出された輝度情報を基にして外周端部形状を算出する演算制御部40とを備えて構成される。
(もっと読む)
対象物の位置特性の判定
室内の対象物の位置特性を判定するシステムであって、部屋の検出領域のため背景表面に配置された、光学的に識別可能な要素(103)を含むシステムを提案する。カメラ(101)が光学的に識別可能な要素(103)の向かい側に検出領域を横切って配置され、検出領域と光学的に識別可能な要素とを含む画像を取得する。検出器(403)が光学的特性に基づいて画像内の光学的に識別可能な要素を検出する。閉塞プロセッサ(405)が光学的特性に応じて画像内の光学的に識別可能な要素(103)の閉塞特性を判定する。位置プロセッサ(407)が閉塞特性に応じて深さ位置を判定し、その深さ位置はカメラ(101)の光軸に沿った対象物の位置を示す。本発明は例えば室内の人物の存在や大まかな位置測定を可能にしてもよい。 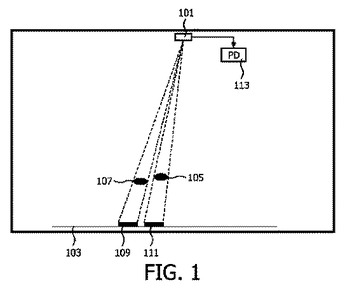 (もっと読む)
(もっと読む)
3次元計測装置及びその制御方法
【課題】コード化パターンの投影を用いた3次元位置計測を高速に行なえるようにする。
【解決手段】計測対象物体の位置姿勢を計測する3次元計測装置は、計測対象物体に投影するパターンを生成し、生成された複数種類のパターンを投影部により計測対象物体に投影して撮像部により撮影するとともに、投影したパターンと計測対象物体の形状モデルと計測対象物体の概略位置姿勢を示す情報とに基づいて、撮像により取得される撮像画像上のパターンの座標値を算出する。そして、算出された座標値を利用して、撮像画像上の撮影されたパターンと前記投影部により投影されたパターンとを対応づけし、計測対象物体に投影されたパターンと撮像部との距離を求める。また、求めた距離と当該計測対象物体の形状モデルとを用いて計測対象物体の位置姿勢を推定し、概略位置姿勢の情報を更新する。
(もっと読む)
オブジェクトを使用した慣性航法システムの整合および較正
慣性航法システムの初期化が、オブジェクトの画像から取得される情報を使用して、実行される。グローバル基準フレーム内のオブジェクトに対する位置および向き情報と、前記オブジェクトに対するカメラに関する位置および向き情報が、前記画像から取得される。前記グローバル基準フレーム内の前記カメラの位置および向き情報が、慣性センサ基準フレームおよび航行座標フレームの間の変換マトリックスとともに、判断される。慣性航法システムが、前記カメラの位置および向き情報と、前記変換マトリックスと、前記オブジェクトが画像化されたときの前記カメラの速度、すなわちゼロ、とを使用して、初期化される。慣性センサからの測定値と初期化データを使用して、モバイルプラットフォームの位置が、航行中に更新され、デジタルマップ上などに、提供され得る。慣性航行エラーは、異なるオブジェクトの画像から取得される情報を使用し、修正され得る。  (もっと読む)
(もっと読む)
照明装置及び該照明装置を用いた計測システム
【課題】コントラストの高いパターン投影を実現する。
【解決手段】計測装置と照明装置、撮像装置の位置関係を較正するキャリブレーションを行う(S101)。二次元パターン光の投影面内での輝度の不均一補正処理を行い(S102)、低下したピーク輝度を補償するための光源光量の調節を行う(S103)。計測対象物に二次元パターン光を投影し(S104)、反射された二次元パターン光を撮像装置で撮像する(S105)。撮像装置側の影響で生ずる二次元パターン光の輝度変化及びパターンエッジの位置ずれを、取得した二次元パターン画像に対し不均一補正処理を適用して補正する(S106)。補正処理した二次元パターン画像を基に、計測装置は計測対象物のそれぞれの測定点における奥行き方向の距離情報を取得して距離計測処理を行う(S107)。
(もっと読む)
計測システム、画像補正方法、及びコンピュータプログラム
【課題】照明系及び撮像系の双方の測定対象物との位置関係が可変である場合の撮像画像による3次元計測を正確に行う。
【解決手段】照明系101の偏角、撮像系102の偏角を考慮して輝度を補正した場合に想定される空間変調器上の輝度分布(照明系101と撮像系102の双方を考慮した輝度分布補正値)を生成する。この輝度分布補正値と、位置関係に起因しない静的な輝度分布補正値とから、3次元計測システムにおける輝度分布の補正値を生成し、この輝度分布の補正値に基づいて、照明パターン画像の階調変換をし、階調変換した照明パターン画像に従った照明を行う。また、動径の情報と、測定対象物103の反射率とを基に、3次元システムの光量減衰率を求め、この3次元システムの光量減衰率と、基準とする光量減衰率との比較結果から、光源の強度を調整する。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 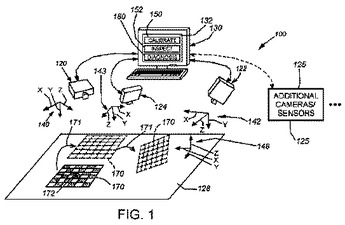 (もっと読む)
(もっと読む)
面形状測定装置、面形状測定方法および光学素子の製造方法
【課題】 正確かつ簡単にディストーションを求めることができ、正確な面形状を測定することができる面形状計測装置を提供すること。
【解決手段】 光源からの光を測定光と参照光とに分割し、被測定面で反射した測定光と参照光とが干渉することで形成される干渉縞に基づいて、被測定面の形状を測定する面形状測定装置は、干渉縞を撮像する第1の撮像素子と、測定光および参照光を第1の撮像素子に導く光学系と、光学系を経由していない光源からの光の光量分布を測定する第2の撮像素子と、第1の撮像素子で撮像した干渉縞に基づいて被測定面の形状を算出する算出手段とを備える。まず、光学系を経由した光源からの光の光量分布を、第1の撮像素子で測定する。そして、第1の撮像素子で測定した光量分布と第2の撮像素子で測定した光量分布とに基づいて、算出手段で算出される被測定面の形状を補正する。
(もっと読む)
3次元フロー測定のための光学イメージング関数の組を求める方法
本発明は、検出光学系を用いて、異なる観測角で検出器面上に測定体積を投影できる多数の検出器面の各検出器面上への測定体積の投影形状を規定する光学イメージング関数の組を求める方法に関する。本発明による方法は、各体積位置(X,Y,Z)への画像点(x,y)の対応関係に加えて、測定体積内の点状の粒子の投影形状を形状パラメータ(a,b,φ,I)によって規定するとともに、検出器面毎に体積位置(X,Y,Z)をそれに対応する形状パラメータ値の組に対応付けるものと規定する。  (もっと読む)
(もっと読む)
露光装置及び露光方法
【課題】ワークがひずんでいる場合でもワークの被露光領域に応じてマスクのパターンを精度良く露光転写することができる露光装置及び露光方法を提供する。
【解決手段】ワーク12とマスク21の両アライメントマークをアライメント検出系52で検出する工程と、両アライメントマークのずれ量に基づいて、マスク21とワーク12の位置ずれ量とワーク12のひずみ量とを算出し、算出された位置ずれ量に基づいて、アライメントを調整する工程と、算出されたひずみ量に基づいて、光源61からの露光光の光束を反射する平面ミラー66の曲率を補正する工程と、を備える。曲率補正工程は、露光光束の光路ELにおいて平面ミラー66より露光面側からレーザー光Lを照射し、カメラ93によって撮像する工程と、平面ミラー66の曲率を補正した際に撮像されるレーザー光L、L´の変位量S1,S2を検出する工程によりひずみ量α、βと対応するように曲率補正する。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】対象物体の少なくとも2次元座標を検出することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10は、検出領域10RのXY平面に沿う方向に検出光L2を出射する複数の位置検出用光源12を備え、かかる位置検出用光源12は、互いに異なる方向に光軸を向けた発光素子12A、12B、12C、12Dからなる。発光素子12A、12B、12C、12Dから出射された検出光L2によって検出領域10Rに、X軸方向で検出光L2の強度が変化するX座標検出用光強度分布およびY軸方向で検出光L2の強度が変化するY座標検出用光強度分布を形成し、この状態で、対象物体Obで反射した検出光を光検出器30で形成する。
(もっと読む)
201 - 220 / 978
[ Back to top ]