
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
161 - 180 / 978
ナビゲーション装置
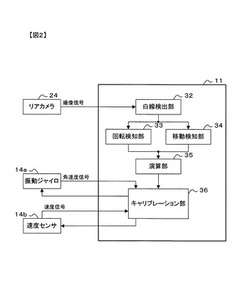
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
形状測定装置

【課題】振動の影響による3次元形状の測定誤差を低減した形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物をライン光で照明して撮像するプローブ20と、プローブ20と被測定物とを相対移動させるリニアモータと、照明の状態と撮像の状態から被測定物の形状を測定する形状演算部と、プローブの振れを検出する振れ検出部と、振れ検出部に検出された振れに基づいて被照明位置の補正を行う補正機構60,80,90とを備えて構成される。
(もっと読む)
形状計測装置およびキャリブレーション方法
【課題】計測点の位置の違いによる法線算出の誤差を可及的に小さくし、計測対象物の3次元形状を精度良く算出するための技術を提供する。
【解決手段】形状計測装置は、カメラ1で撮像を行うことにより得られた画像から、計測対象物4の表面上の複数の注目点について特徴量を算出し、記憶装置62に予め記憶されているデータを参照して特徴量の値から法線の向きを算出し、その算出結果から計測対象物4の表面の3次元形状を復元する。ここで、記憶装置62は、カメラ1の視野内に設定された複数の基準位置のそれぞれについて作成された複数のデータを記憶しており、注目点の位置に応じて参照するデータが切り替えられる。
(もっと読む)
傾き検査装置及び傾き検査方法
【課題】基板に散ったハンダやゴミ等による基板の傾きの誤認識を防ぐこと。
【解決手段】傾き検査装置10は、所定の範囲を撮像領域として、部品が取り付けられる基板2を撮像するカメラが出力する撮像領域の画像より、基板2及び部品の表面の高さを基板2の全域にわたって測定して高さ情報を得る高さ測定部12を備える。また、撮像領域の画像に含まれる基板2の色と、基板2に配置される部材の色と、を異なる2色で表現する2値化情報に基づいて、基板2の色によって表現される箇所に少なくとも3点の測定点を指定する測定点指定部13を備える。また、測定点毎に測定される高さ情報に基づいて、所定の平面に対する基板2の傾きを計算する傾き計算部14を備える。また、基板2の傾きに基づいて高さ情報の補正量を求め、基板2の表面の全域にわたって高さ情報を補正する傾き補正部15と、を備える。
(もっと読む)
3次元位置測定装置
【課題】 画像法の3次元位置測定装置において、測定可能な測定対象物の大きさ、及び測定対象物までの距離の範囲を拡げる。
【解決手段】 撮影視野の仰角、方位角、及び画角の設定を変更する機能を有するPTZカメラ1、2と、PTZカメラ1、2の撮影視野の設定情報及び撮影画像情報に基づいて、PTZカメラ1、2が撮影した測定対象点の3次元座標を算出する3次元座標算出手段34とを有する。
(もっと読む)
光学式測定システム
【課題】空間座標及び/又は向きの測定を、限られた空間で素早く行う。
【解決手段】第1の空間方向センサ102と、第2の空間方向センサ103と、処理手段106とを備え、第1の空間方向センサ102に、互いに対する位置及び第1の空間方向センサ102に対する位置が既知であるターゲット105のパターン104が組み合わせられており、処理手段106が、ターゲット105の互いに対する既知の位置及びプローブ101に向けられた第2の空間方向センサ103に対するターゲット105の空間的方向の測定に基づいて、第2の空間方向センサ103に対するターゲット105のパターン104の向き及び/又は空間座標を計算し、第1の空間方向センサ102が、プローブ101の空間座標及び/又は向きを割り出す。
(もっと読む)
鉛蓄電池用格子体鋳造装置の異常判定方法
【課題】鉛蓄電池用格子体に存在する形状変化を、バラツキなく高精度で検出できるばかりではなく、検出した鉛蓄電池用格子体の形状変化から、鉛蓄電池用格子体鋳造装置の異常、例えば、鋳造鋳型に塗布されている離型剤の寿命及び鋳造装置の不具合を迅速かつ適確に判定可能な、鉛蓄電池用格子体鋳造装置の異常判定方法を提供するものである。
【解決手段】鋳造された鉛蓄電池用格子体の形状変化を検出して、鉛蓄電池用格子体鋳造装置の異常を判定する方法であって、(a)鉛蓄電池用格子体の形状変化検出領域を照明する工程、(b)照明された形状変化検出領域を撮像する工程、(c)撮像された画像に2値化処理及び任意的に収縮処理を施す工程、(d)上記処理後の画像から鉛蓄電池用格子体の形状変化を検出する工程、並びに(e)検出した形状変化から、鉛蓄電池用格子体鋳造装置の異常を判定する工程を含む、鉛蓄電池用格子体鋳造装置の異常判定方法。
(もっと読む)
反射面の形状測定方法及びシステム
【課題】本発明の目的は、低い装置コストのシステムにより、反射面及び特に、透明対象物に対して信頼性の高い形状測定が可能となり、システムの較正及び形状測定が特に処理しやすくなる選択肢を提案することにある。
【解決手段】本発明は、反射面(14)で反射されるパターン(15)を有するパターンキャリア(2)と、反射面(14)に反射されたパターン(15)を画素ごとに視認するカメラ(1)とを有するシステムを較正する方法に関する。カメラ(1)とパターン(15)との位置及び向き、並びにカメラ(1)の画素(8)ごとの視認方向を較正するため、面積の広い2枚の平坦なミラー面(5、6)が平行な構成で用いられ、ミラー面(5、6)が液体によって生成される。
(もっと読む)
車輪挙動計測装置
【課題】走行状態の車両における路面に対する車輪の姿勢や、車体に対する車輪の姿勢及び車輪のタイヤ形状を定量的に計測する挙動計測装置を提供する。
【解決手段】車両走行時の車輪の挙動を計測する車輪挙動計測装置であって、車両に設けられ、車輪を撮像する複数の車輪カメラ及び路面を撮像する複数の路面カメラと、車輪のホイールに設けられ、当該車輪のホイールの外側面と平行に取り付けられる不動板と、不動板における車輪カメラの視野内に、少なくとも3箇所配設される第1被測定体と、ホイールの外側面における車輪カメラの視野内に、複数配設される第2被測定体と、車輪カメラと路面カメラとが撮像した画像を記憶する記憶手段と、記憶手段が記憶した画像を処理する画像処理手段とを具備するようにした。
(もっと読む)
キャリブレーション治具およびこれを用いた撮像装置のキャリブレーション方法
【課題】コンパクトで、簡単且つ精度良く製作することができるキャリブレーション治具およびこれを用いた撮像装置のキャリブレーション方法を提供することである。
【解決手段】表面にセットステージ2と平行な平坦面34を有するベース32と、平坦面34に貫通形成され、レーザー変位計5の基準位置を取得するために輪郭形状を測定され、且つ認識カメラ4の基準位置を取得するために周縁部と共に撮像される共通基準孔33と、を備え、共通基準孔33は、レーザー変位計におけるレーザースポットのスポット35径より大きく、且つ認識カメラ4の視野に収まる大きさに形成されているものである。
(もっと読む)
カメラ校正装置
【課題】校正用撮像対象物を従来のものより小型化しても精度が高いカメラ校正を行うことができるカメラ校正装置を提供する。
【解決手段】イメージセンサ140を有するカメラ120と、イメージセンサ140と既知の位置関係にある加速度センサ150と、少なくとも2点の特徴点を有する校正用撮像物がカメラ120によって撮像された撮像画像と加速度センサ150によって検知された傾きとに基づいて、カメラ120の撮像位置および撮像方向を算出するカメラ校正部160とを備える。
(もっと読む)
三次元形状計測装置および三次元形状計測装置のキャリブレーション方法
【課題】三次元形状計測におけるキャリブレーションを効率的に且つ高精度に行う。
【解決手段】ガラス材で構成され、上面、内層面、底面に、光源部11からスリット光が
照射されたときに輝線を映すパターンが形成されたキャリブレーション用ブロックと、複
数の特徴点を有する二次元パターンの撮像画像に基づいて、カメラパラメーターを計算す
るカメラパラメーター計算部22と、上面、内層面、底面に形成されたパターン上の輝線
の画像から特徴点を検出して二次元座標値を計算し、この二次元座標値とキャリブレーシ
ョン用ブロックの寸法データとに基づいて特徴点の三次元座標値を計算し、スリット光の
広がりを示す平面を表す式の係数を計算するスリット光平面計算部24と、カメラパラメ
ーターと平面を表す式の係数とに基づいて、二次元座標値から三次元座標値に変換するた
めの座標系変換係数を計算する三次元座標計算部25とを備えた。
(もっと読む)
測定波形の補正方法
【課題】測定波形のマスター波形に対する位置補正を精度よく行ことが可能な測定波形の補正方法を提供する。
【解決手段】測定波形10の補正方法は、マスター被測定物の二次元形状を測定するとともに、被測定物1の二次元形状を測定する工程と、マスター波形20を生成するとともに、測定波形10を生成する工程と、マスター波形2の頂点の形状データ「Bv」のX座標「Xbm」、および測定波形10の頂点の形状データ「Av」のX座標「Xam」を算出する工程と、測定波形10のX座標「Xam」がマスター波形20のX座標「Xbm」と等しくなるように、測定波形10をX軸方向に平行移動する工程と、マスターZ平均値「Zbv」を算出するとともに、Z平均値「Zav」を算出する工程と、測定波形10のZ平均値「Zav」がマスター波形20のマスターZ平均値「Zbv」と等しくなるように、測定波形10をZ軸方向に平行移動する工程と、を備える。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】カラーコードターゲットCTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3と、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して第1の撮影画像F3Bを得、照明された測定対象2を撮影して第2の撮影画像F3Aを得る撮影部4と、第2の撮影画像F3Aに対する補色関係にある補色画像又は第2の撮影画像F3Aに対するネガ画像を形成し、形成された補色画像又はネガ画像を投影用ターゲット画像F1に合成して投影用ターゲット画像F1を補正する第1の画像処理部8とを備える。
(もっと読む)
基板外観検査装置および基板外観検査方法
【課題】基板の反りに起因する検査対象部の位置ずれを簡易に測定して補正することができる基板外観検査装置および基板外観検査方法を提供する。
【解決手段】本発明の基板外観検査装置1は、基板に反りが生じていない場合に撮影手段(カメラ11)の視野内の基準となる位置に基準パターンが位置するように設定された相対位置において、撮影手段により、基板の反りに起因する基準パターンの位置ずれ量を測定するための基準位置ずれ量測定用画像を取得し、当該画像内における基準パターンの位置と基準となる位置との距離を基準位置ずれ量として測定する基準位置ずれ量測定手段(基準位置ずれ量測定部26)と、基準位置ずれ量および基準パターンの基板上の位置に基づいて基板の反り起因する検査対象部の位置ずれ量を推定し、相対位置を当該位置ずれ量分補正する相対位置補正手段(補正座標算出手段27)と、を備えることを特徴とする。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】ターゲットTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して撮影画像F3を得る撮影部4、撮影部4で撮影された撮影画像F3からターゲットTの特徴を検出するターゲット特徴検出部62、撮影画像F3におけるターゲットTの特徴に関する所定の許容条件を記憶する許容条件記憶部54、撮影画像F3が所定の許容条件を満たすか否かを判定する許容条件判定部7、許容条件判定部7が所定の許容条件を満たさないと判定した場合には、所定の許容条件を満たすようにターゲットTの特徴を変更して投影用ターゲット画像F1を補正する画像処理部8とを備える。
(もっと読む)
画像処理装置
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
膜構造測定方法及び表面形状測定装置
【課題】測定対象膜に照明光を照射して測定される表面形状データ及び界面形状データから、この測定対象膜の屈折率を得ることができる膜構造測定方法及び表面形状測定装置を提供する。
【解決手段】表面形状測定装置の制御用プロセッサで実行される膜構造測定方法は、撮像装置により、物体に形成された測定対象膜に光を照射し、当該光の反射光からこの測定対象膜の表面の形状である表面形状データ及び測定対象膜と物体との界面の形状である界面形状データを測定するステップ220と、平均値がほぼ0となるように表面形状データ及び界面形状データの各々を基準面を用いて補正することにより、補正された表面形状データ及び補正された界面形状データを算出するステップ230と、補正された表面形状データ及び補正された界面形状データから、測定対象膜の屈折率を算出するステップ240と、を有する。
(もっと読む)
物体表面傷の計測方法
【課題】物体表面に摩耗や撓み等が存在する場合、表面上に障害物が存在するような場合に1回の計測範囲を超える長さに渡って計測する場合においても物体表面の傷を高精度で測定することが可能な物体表面傷の計測方法を提供する。
【解決手段】物体3の両端間に部材2を設け水平板6を押しつけて変形硬化させ、水平板を取り外し物体両端と部材表面とを結ぶ基準線を設定し、計測器を設置し、計測器を基準線に沿って移動させ物体表面までの距離を測定して傷の分布を示す第1の計測データを取得し、計測器を次の計測範囲内に設置し、計測器を移動させ物体表面までの距離を測定して第2の計測データを取得し、第1の計測データと第2の計測データとを連結させたデータを取得する。
(もっと読む)
駆動装置
【課題】測定装置に設けられたエアシリンダの内圧をより簡単に調整できるようにする。
【解決手段】エアシリンダ62には、被検物の形状を測定するプローブ26が固定されており、リニアアクチュエータによりエアシリンダ62の稼動部63を上下に移動させることで、プローブ26が移動する。また、稼動部63内部には、上部空間65と下部空間66とが設けられており、上部空間65への空気の注入量を調整することにより、稼動部63に対して上下方向に加わる力のバランスが調整される。上部空間65への空気の注入量は、稼動部63を移動させるリニアアクチュエータに供給される駆動電流の値に基づいて求められる。本発明は、形状測定装置に適用することができる。
(もっと読む)
161 - 180 / 978
[ Back to top ]