
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
81 - 100 / 978
荷電粒子ビーム描画装置
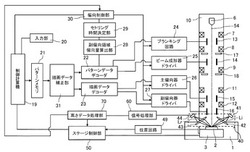
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
測定装置、測定方法、およびプログラム

【課題】対象物に接触または近接させた複数の測定用端子の位置を撮影画像に基づいて取得する技術において、一部の測定用端子の位置を取得できなかった場合に、再度の撮影を行うことなくその位置を取得する。
【解決手段】プローブソケット11,12は、被験者の頭部25に複数が装着される。プローブソケットを被験者に装着した状態を複数の方向から撮影し、その撮影画像からプローブソケットの位置を検出する。この際、ある特定の撮影画像からの検出が上手くゆかず、一部のプローブソケット位置が特定できない場合、他の撮影画像の中に写っている当該プローブソケットの撮影画像を利用して再検出を行う。これにより、検出ミスがあっても再度の撮影を行わずに済む。
(もっと読む)
タイヤトレッド面の断面形状ならびにトレッド溝の深さを測定する測定装置。
【課題】タイヤのトレッド面の断面形状とトレッド溝の深さを非接触で高速で測定する装置
【解決手段】この発明は、タイヤのトレッド面の断面形状を測定して、測定結果からトレッド溝の深さを計測する装置であり、タイヤのトレッド面近くに幅方向に並置するガイド機構と、トレッド面を単一光で照射する光源装置と、単一光の反射輝点を撮影するデジタルカメラと、光源装置並びにデジタルカメラをガイド機構に沿って移動させながら反射輝点を撮影する制御装置と撮影された画像データからトレッド面断面形状とトレッド溝の深さを測定する手段を備えたことを特徴とする。
(もっと読む)
高精度非接触位置測定機構を持つサブミリ波近傍界測定装置
【課題】サブミリ波ビームの電磁気的強度分布を、光学系構成要素のセットアップに伴う誤差による影響を受けずに、且つ非接触で測定するためのシステム及び方法を提供する。
【解決手段】サブミリ波ビーム受信部に3以上のコリメート光反射体を配置し、コリメータから送信され当該反射体により反射されたコリメート光の受光位置に基づいて、送信系と受信光学系との間のミスアラインメントを決定する。受信光学系にて受信されたサブミリ波ビームの電磁気的強度分布を、ミスアラインメントを用いて補正することにより、ミスアラインメントの影響が排された強度分布を決定する。
(もっと読む)
移動体駆動システム及び移動体駆動方法、パターン形成装置及び方法、露光装置及び方法、デバイス製造方法、並びに決定方法
【課題】エンコーダで位置を測定しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハテーブルWTBのY軸方向の位置情報を計測するエンコーダ64の計測値とその計測時に干渉計16,43A及び43Bによって計測されるウエハテーブルWTBの非計測方向(例えば、Z、θz及びθx方向)の位置情報に応じた既知の補正情報とに基づいて、ウエハテーブルがY軸方向に駆動される。すなわち、非計測方向へのヘッドとスケールの相対変位に起因するエンコーダの計測誤差を補正する補正情報により補正されたエンコーダの計測値に基づいて移動体がY軸方向に駆動される。従って、ヘッドとスケールの間の計測したい方向(計測方向)以外の相対運動に影響を受けることなく、エンコーダで位置を計測しつつ、ウエハテーブル(移動体)を所望の方向へ精度良く駆動することが可能になる。
(もっと読む)
マーカ
【課題】本発明の課題は、マーカとマーカの観測物が正対する付近でも、マーカを観測物により正確に計測することができるマーカを提供することである。
【解決手段】上記の課題を解決するために、本発明に係るマーカは、模様と、模様の上に付けられたレンズであって、レンズを観測する方向に応じてレンズ上に観測される濃淡パターンが変化するレンズとを含むマーカユニットを備えることを特徴とする。
(もっと読む)
3次元座標計測装置
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
情報処理方法及び情報処理装置
【課題】 複数の撮像装置をそれぞれ処理装置に接続した状態で、第1の撮像装置の位置姿勢情報計測値を第2の撮像装置の位置姿勢に変換するための較正情報をより簡便に取得することを目的とする。
【解決手段】 マスタ演算処理装置300は、ビデオカメラ120が撮影したランドマークを含む撮影画像を入力し、ビデオカメラ120の位置姿勢を算出し、スレーブ演算処理装置1300に送信する。スレーブ演算処理装置1300は、ビデオカメラ1120で撮像された画像上のランドマークの識別番号及び画像座標を取得し、(画像座標−世界座標−マスタ撮像装置位置姿勢)の組としてデータリストを生成する。生成したデータリストより較正情報算出部1340は、画像座標の理論値と実際の観測値との誤差が最小となるようにビデオカメラ120からビデオカメラ1120への位置姿勢の較正情報を算出する。
(もっと読む)
画像プローブの校正方法とタッチプローブ
【課題】簡易的な構成で画像プローブの校正を高精度に行いながら画像プローブによる被測定物の対象拡大と画像プローブの使い勝手の向上が可能となる。
【解決手段】撮像方向(光軸Dの方向)を垂直方向に保持し画像プローブデータを取得する工程(ステップS2)と、撮像方向を所望角度に傾斜させ傾斜角度データを取得する工程(ステップS8)と、プローブ交換工程(ステップS10)と、撮像方向を垂直方向に保持した際の初期角度でタッチプローブ118を保持しタッチプローブデータを取得する工程(ステップS12)及び位置関係データを取得する工程(ステップS16)と、傾斜角度データでタッチプローブ118を傾斜させ傾斜タッチプローブデータを取得する工程(ステップS20)と、画像プローブデータ等に基づいて、所望角度への傾斜後の画像プローブ116の焦点位置及び光軸D周りの回転角を校正する工程(ステップS22)と、を含む。
(もっと読む)
テールクリアランス測定装置
【課題】測定効率の向上を図れると共に、作業員の負担の軽減を図る上で有利なテールクリアランス測定装置を提供する。
【解決手段】テールクリアランス測定装置30は、カメラ部32と、コンピュータ34とを含んで構成されている。カメラ部32は、テール部14の内周面1402および該内周面1402に対向するセグメント20の外周面2002を撮影して画像データを生成するものである。カメラ部32は、テール部14の内周面1402およびセグメント20の外周面2002の周方向に90度の間隔をおいた4個所を撮影するように4個設けられている。コンピュータ34は、ケーブルを介してカメラ部32から供給される画像データに基づいてテール部14のスキンプレート14Aの内周面1402とセグメント20の外壁面2002とのテールクリアランスを導出する。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
従来技術によれば,試料に熱ダメージを与えることなく,短時間で高感度に欠陥検出・寸法算出することが困難であった。
【解決手段】
被検査対象物である試料の表面の領域を所定の照明条件にて照明する照明工程と、該試料を並進および回転させる試料走査工程と、該試料の照明領域から複数の方向に散乱する複数の散乱光のそれぞれを、前記試料走査工程における走査方向および該走査方向と概略直交する方向の各々について複数画素に分割して検出する散乱光検出工程と、前記散乱光検出工程において検出された複数の散乱光のそれぞれについて、該試料の概略同一領域から概略同一方向に散乱した散乱光を加算処理し、該加算処理した散乱光に基づき欠陥の有無を判定し、該判定された欠陥に対応する複数の散乱光のうち少なくとも一の散乱光を用いて該判定された欠陥の寸法を算出する処理工程と、を備える欠陥検査方法である。
(もっと読む)
高精度アライメント用画像収集装置とその画像収集モジュール
【解決手段】画像収集モジュール1が一個の画像取得位置に位置する時、複数個の光入力側110はそれぞれ載置台2と運び台3に向くように形成され、そして複数個の光出力側111はそれぞれ二個の画像取得ユニット12、12’に向くように形成されることにより、載置台2と運び台3の場所の光線は同時に複数個の光入力側110を経由してそれぞれ二個の光反射プリズム112a、112bに入射し、そして二個の光反射プリズム112a、112bの光反射面R1、R2に反射される光線は複数個の光出力側111を通じて上記光伝送経路に沿ってそれぞれ二個の画像取得ユニット12、12’まで到達するように構成されている。
【効果】簡単な操作の形態で物体に対して精確なアライメントを行うことにより、アライメントに必要な時間とコストを低く抑えることができ、さらに作業上の便利性を高めることができる。
(もっと読む)
ステレオカメラの校正装置および校正方法
【課題】ステレオカメラの校正装置および校正方法を提供すること。
【解決手段】ステレオカメラの校正装置300は、第1カメラ320と、第2カメラ318と、カメラステー140とを含んでおり、コリメータユニット302がステレオカメラから距離を隔てて配置されたテストチャート306が無限遠位置に配置されたと等価な光路を形成させている。視差算出部362は、ステレオカメラが撮影した左右画像からテストチャート306とステレオカメラとの間の異なる光学的距離に相当する視差データを計算し、パラメータ算出部364が、視差算出部362が計算した視差データおよびテストチャートまでの実距離データを使用してステレオカメラの測距パラメータである視差オフセットbおよび距離換算パラメータaを算出している。
(もっと読む)
ステージ装置、露光装置及びデバイスの製造方法
【課題】テーブルの位置決めに有利なステージ装置を提供する。
【解決手段】ベース部と、XY平面に沿って移動可能なテーブルと、Y軸方向に沿った前記第1の端面の位置を計測する第1のY軸干渉計222と、前記Y軸方向に沿った第2の計測光路を有する第2の端面の位置を計測する第2のY軸干渉計224と、前記第1のY軸干渉計及び前記第2のY軸干渉計から前記XYZ座標系のX軸方向に離間して、且つ、前記Y軸方向に沿った第3の計測光路を有する第3のY軸干渉計228と、前記第1のY軸干渉計の計測値、前記第2のY軸干渉計の計測値及び前記第3のY軸干渉計の計測値に基づいて前記テーブルの変形量を求め、前記変形量に基づいて目標位置を補正した補正目標位置を求め、前記第1のY軸干渉計の計測値と前記第2のY軸干渉計の計測値から求まる前記テーブルの位置が前記補正目標位置に位置するように前記テーブルを位置決めする制御部とを有する。
(もっと読む)
標準ゲージ、測定器の測定精度保証方法、標準ゲージの製造方法、及び、測定器の性能評価方法
【課題】非接触三次元測定器による測定対象物の表面における光沢が異なる場合においても測定精度を保証することが可能な、標準ゲージ、測定器の測定精度保証方法、標準ゲージの製造方法、及び、測定器の性能評価方法を提供する。
【解決手段】標準ゲージG1は、所定の強さで入射光を対象物に照射した場合に、入射光の強さに対する正反射光と拡散反射光との両方の強さの割合を計測した積分反射率SCIと、入射光の強さに対する拡散反射光の強さのみの割合を計測した拡散反射率SCEと、がそれぞれ異なる12枚の平板aから平板jを組合せて構成したものである。
(もっと読む)
校正儀およびその使用方法
【課題】大きな校正儀であっても、その運搬、設置、撤去における負担を軽減し得るカメラ用校正儀およびその使用方法を提供する。
【解決手段】このカメラ用校正儀301は、特徴点P101が表面に形成された板状をなす複数の校正儀片101、151、201、251と、その複数の校正儀片と着脱可能に且つ板の延在方向への移動を拘束するように連結する複数の連結部材51とを備えている。そして、このカメラ用校正儀301を使用する際には、複数の校正儀片101、151、201、251を複数の連結部材51によって相互に組み立てて市松模様を構成する。その組み合わせパターンや大きさは、空間的な制約や、カメラとの位置関係に応じて適切に変える。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
表面検査装置のシェーディング補正方法
【課題】シェーディングの状態や、その雑音成分が変化しても、リアルタイムにシェーディング補正が可能な表面検査装置のシェーディング補正方法を提供することを目的とする。
【解決手段】予め記憶された前回走査時までの走査検出信号で生成した第1のシェーディング補正信号s8を元にして閾値信号s3、s4を生成し、今回の走査時の走査検出信号s1に含まれる欠陥部に対応する位置の信号値を第1のシェーディング補正信号s8で置換してアルタイムに補正走査信号s6を求め、今回の走査時の走査検出信号を正規化するようにしたことを特徴とする表面検査装置のシェーディング補正方法。
(もっと読む)
部品実装装置及び部品実装方法
【課題】部品装着前の位置合わせに必要な装置誤差のデータを正確に取得して部品を高精度で基板に装着することができる部品実装装置及び部品実装方法を提供することを目的とする。
【解決手段】装着ヘッド15のツール(部品用ツール20又は治具用ツール20J)の加熱を行うヘッド側加熱ヒータH1のほか、治具部品JGが載置される治具部品載置部AR2の加熱を行う載置部側加熱ヒータH2を備え、治具部品載置部AR2の温度がヘッド側加熱ヒータH1によって加熱された治具用ツール20Jの温度とほぼ同じ温度になるように載置部側加熱ヒータH2の制御を行う。
(もっと読む)
検査方法
【課題】本発明は検査方法に関わり、より詳細には形状測定装置の測定対象物に対する検査方法を提供する。
【解決手段】基板を検査する検査装備において検査領域を設定するために、基板上に複数の測定領域を設定し、測定領域のうち測定対象物を検査するためのターゲット測定領域と隣接する少なくとも一つ以上の隣接測定領域の基準データ及び測定データを獲得した後、隣接測定領域内で少なくとも一つ以上の特徴客体を抽出する。特徴客体に対応する基準データと測定データとを比較して、歪曲量を獲得し、歪曲量を補償してターゲット測定領域内の検査領域を設定する。これにより、基準データと測定データとの間の変換関係をより正確に獲得することができ、歪曲を補償した正確な検査領域を設定することができる。
(もっと読む)
81 - 100 / 978
[ Back to top ]