
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
41 - 60 / 978
3次元相対座標計測装置およびその方法
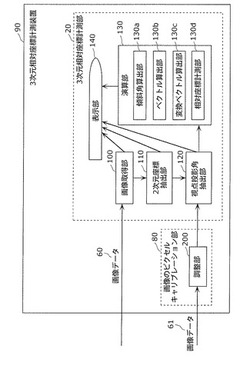
【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム

【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
レーザー高さ測定装置および部品実装機
【課題】正確に測定位置を制御でき、かつセンサの取り付け位置調整機構や位置調整作業を必要とせずに測定位置の制御精度を保つことができるレーザー高さ測定装置を提供する。
【解決手段】レーザー光L1を照射するレーザー光照射部61および対象物で反射されたレーザー光を検出する反射光検出部62を有するレーザー高さセンサ6と、レーザー高さセンサ6を平面内で移動させるセンサ移動機構(ヘッド駆動機構41〜43)と、所定の較正位置(光入射軸AO上)に配置された画像カメラ(部品カメラ5)と、レーザー光L1を減衰しつつ透過する減光フィルタ71と、レーザー高さセンサ6を較正位置AOに位置決めしてレーザー光L1を照射し、減光フィルタ71を透過したレーザー光を画像カメラ5で撮像してレーザー光画像を得るレーザー光撮像手段と、座標位置の補正値をレーザー光画像上でのレーザー光の位置に基づいて求める補正値取得手段と、を備える。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測する。
【解決手段】第1光源からの第1光束によって形成される被検体の位置情報を含む第1干渉信号と、第2光源からの第2光束によって形成される前記被検体の位置情報を含む第2干渉信号と、前記第1光束の波長を走査しながらの前記第1干渉信号と前記第2光束の波長を走査しながらの前記第2干渉信号とに基づいて前記被検体までの絶対距離を算出する処理部とを備え、前記処理部は第1時刻から第2時刻までの時間間隔における前記第1干渉信号の位相と前記第2干渉信号の位相との差分の変化量によって得られる前記被検体の速度によって、前記第1干渉信号および前記第2干渉信号の少なくとも一方に基づいて算出される誤差を有する絶対距離を補正し、誤差が補正された絶対距離を算出する。前記第1時刻および前記第2時刻は前記第1光束の波長と前記第2光束の波長との差分が互いに等しい時刻である。
(もっと読む)
カメラシステムおよび画像生成方法
【課題】被検物が撮像画像上を移動した場合でも、良好な検波処理画像を得ることができるカメラシステムを提供すること。
【解決手段】所定周期で点灯消灯するパルス光を被検物に照射し、前記パルス光が照射される領域を含む領域を繰り返し撮像し、撮像された画像の画像信号に対して、画素ごとに同期検波処理を行なって、照射される前記パルス光の点灯消灯のタイミングに同期した検波処理画像を生成する際において、撮像画像上における前記被検物の移動速度に基づいて、画像信号の読出し画素位置を変更するとともに、単位画素未満の移動量が検出された場合には、検出した単位画素未満の移動量に基づいて、読出し画素位置を変更した画像信号の信号出力を補正するカメラシステム。
(もっと読む)
センサ角度の測定方法
【課題】簡便な構成により曲折部における加工品位を向上させることができるセンサ角度の測定方法を提供する。
【解決手段】ワーク3上の各教示点Pi及び対応する追加点Qiにセンサ4を順次位置させ、センサ4でワーク3までの距離を計測して各教示点Piにおけるセンサ4のワーク3に対する角度を測定する際に、溶接線13がワーク3の曲折部10の前後にわたる場合、各教示点Piに対応する追加点Qiを、教示点Piが、曲折部10に至る直前の加工ライン13についての最後の教示点Pmでない場合には当該教示点Piの前方に位置させ、最後の教示点Pmである場合にはその後方に位置する追加点Qmとする。
(もっと読む)
3D表面形状をキャプチャーするための方法およびシステム
【課題】変形表面のキャプチャーを高解像度で得る。
【解決手段】シーンの3D画像データをキャプチャーするシステムにおいて、各々が互いに異なる波長の光を照射し、キャプチャーすべきシーンを照明するよう構成された三つの光源と、前記シーンから反射された前記光源からの光を受光するよう構成され、各光源から受光された光を分離し、前記三つの光源ごとにキャプチャーされた前記画像に関するデータを出力する第一ビデオカメラと、前記シーンの第一デプスマップをキャプチャーするよう構成されたデプスセンサと、前記第一ビデオカメラからデータを受信し、該データを処理して前記三つの光源ごとにキャプチャーされた前記画像から得られた法線領域に関するデータを取得する解析ユニットにおいて、前記法線領域に関する前記データを前記第一デプスマップのデータに合成して、前記シーンの3D画像データをキャプチャーする前記解析ユニットとを備える。
(もっと読む)
曲率半径測定機の被測定体保持位置補正方法および曲率半径測定機
【課題】曲率半径測定機の被測定体保持位置補正方法において、曲率半径測定機に発生する被測定体保持位置のずれを精度よく迅速に補正することができるようにする。
【解決手段】曲率半径測定機の被測定体保持位置補正方法であって、保持工程と、校正用光学部材の校正面の面頂を測定光束の集光位置に位置合わせし、位置合わせ後の干渉縞画像に基づく干渉縞画像情報を記憶する基準調整工程(ステップS3)と、この位置を基準位置として、基準位置から位置ずれ測定位置に被測定体を相対移動して干渉縞画像を記憶する位置移動工程と、各位置での干渉縞画像に基づいて干渉計の光軸に対する位置ずれ量を測定する位置ずれ算出工程(ステップS6、S13)と、この位置ずれ量に基づいて、位置補正量を算出する位置補正工程(ステップS15)と、を備え、被測定面の曲率半径の測定を行う際に、位置補正量に基づいて保持台の位置補正を行う。
(もっと読む)
検出対象物の中心位置を算出する方法、装置およびプログラム
【課題】複数の検出対象物が任意の方向を向いて配置されている場合であっても、それぞれの検出対象物の中心位置を算出することができる方法、装置およびプログラムを提供する。
【解決手段】既知の半径を有する円筒または球を少なくとも一部に含む検出対象物の中心位置を算出する方法を提供する。当該方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、検出対象物の形状に相当する領域を入力画像から抽出するステップと、抽出された領域についての高さ情報を取得するステップと、抽出された領域内において明るさが極大となる部分を特定し、当該部分の法線方向を決定するステップと、決定した法線方向と、既知の半径と、明るさが極大となる部分の位置と、対応する高さ情報とから、検出対象物の中心位置を決定するステップとを含む。
(もっと読む)
アンテナ位置判定装置
【課題】 2種類のレーザセンサを組み合わせて使用し、複雑な計測を行うことなく、アンテナの放射部が基準位置に入っているか否かを判定させることで、簡易な構成によるアンテナ位置判定装置を提供することを目的とする。
【解決手段】 固定治具にアンテナが固定された後、第1透過型レーザセンサ部及び第2透過型レーザセンサ部並びに複数の反射型レーザセンサ部を制御してレーザ光を発光させ、第1透過型レーザセンサ部及び第2透過型レーザセンサ部が遮光を検知し、複数の反射型レーザセンサ部が導出した距離が適正距離であるときに、放射部が基準位置に配置されていると判定し、第1透過型レーザセンサ部又は第2透過型レーザセンサ部の少なくとも一方が透過を検知したとき、又は、複数の反射型レーザセンサ部が導出した距離が適正距離でないときに、放射部が基準位置に配置されていないと判定するアンテナ位置判定装置。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
厚さ測定装置、及び厚さ測定方法
【課題】距離検出器の設定位置に変位があっても、短時間で、測定誤差の補正が可能な厚さ測定装置、及び厚さ測定方法を提供することを目的とする。
【解決手段】基準厚さを有する第1の厚さ部と第2の厚さ部を備える校正板3と、検出部1を移動させる移動機構部2と、検出部を予め定める一定長さの「校正位置」、及び予め定められる「測定位置」に、移動を指令する位置設定部4と、を備え、位置設定部は、「校正」指令を移動機構部に送り、検出部を「測定位置」から「校正位置」に移動させ、予め設定された第1の厚さ部と第2の厚さ部との校正位置信号を厚さ演算部5に送り、厚さ演算部は、第1の厚さ部及び第2の厚さ部の厚さを求め、夫々の基準厚さとの差を求めて、「測定位置」で求めた厚さを補正し、厚さ校正板を固定し、検出部を移動させて、予め設定された第1及び第2の距離検出器の設定位置の変位による測定誤差を補正するようにしたことを特徴とする。
(もっと読む)
マーク検出装置およびマーク検出方法ならびに画像作成および切り抜き装置
【課題】コスト高を招来することなく、簡単な構成により、自動的にセンサーの感度を調整することができるマーク検出装置およびマーク検出方法ならびに画像作成および切り抜き装置を提供しようとする。
【解決手段】投光手段から投光された光の反射光を受光手段により受光し、受光量に応じた検出電圧を出力するセンサーを備え、上記センサーにより検出した検出電圧を基準電圧と比較することにより、媒体上に形成されたマークを検出するマーク検出装置において、上記センサーにおける基準電圧を設定することが可能であるとともに、設定した基準電圧を出力する基準電圧出力手段と、上記基準電圧出力手段より出力された基準電圧と、上記センサーに出力された検出電圧との差分を増幅して出力する電位差出力手段とを有するようにしたものである。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法
【課題】光ビーム照射装置の空間的光変調器の傾きとヘッド部の傾きとを容易に判別して、光ビームの歪みを抑制し、描画精度を向上させる。
【解決手段】光ビーム照射装置20から照射される光ビームを受光する受光装置51をチャック10に設け、光ビーム照射装置20のヘッド部20aを回転する回転機構28を設ける。回転機構28によりヘッド部20aを回転する前と回転した後に、光ビーム照射装置20から照射された光ビームを受光装置51により受光する。ヘッド部20aを回転する前後の、受光装置51により受光した光ビームの位置の変化から、光ビーム照射装置20の空間的光変調器25の傾きとヘッド部20aの傾きとを判別し、判別結果に基づき、空間的光変調器の傾き又はヘッド部20aの傾きを補正する。
(もっと読む)
移動量測定装置および方法
【課題】累積的な移動量および1回測定当たりの移動量の測定精度が共に良好な移動量測定装置。
【解決手段】画像を入力する手段と、入力画像を記憶する手段と、記憶された画像の一部をテンプレート画像として抜き出す手段と、入力画像とテンプレート画像との相関計算によりパターンマッチングをする手段と、パターンマッチングの結果を用いて被測定物の移動量を算出する手段と、を備え、移動量を算出する手段は、固定されたテンプレート画像を用いたパターンマッチングにより計算された移動量と、逐次更新されたテンプレート画像を用いたパターンマッチングにより計算された移動量とを比較し、移動量の差が一定値未満の場合は固定されたテンプレート画像に基づく移動量を選択し、移動量の差が一定値以上の場合は両方の移動量を用いて補正計算することによって、被測定物の移動量を算出する移動量測定装置。
(もっと読む)
ステレオカメラ較正装置およびステレオカメラ較正方法
【課題】マーカを設置するための較正用ポールの本数を少なくする。
【解決手段】回転可能であり、回転角の調整によって電子カメラによる第1、第2マーカの撮影を可能とする可動ミラーと、可動ミラーの回転角を取得する回転角取得装置12と、電子カメラの撮像面に対する第1、第2マーカの投影点の位置を検出する投影点検出装置13と、電子カメラのカメラ要素の相対的な位置関係、可動ミラーの回転中心軸の位置および第1、第2マーカの位置を記憶する記憶部15と、カメラ要素の相対的な位置関係、回転中心軸の位置、第1、第2マーカの位置、可動ミラーの回転角および第1、第2マーカの投影点の位置から電子カメラの位置および向きを算出するカメラ位置算出部18とを設ける。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
41 - 60 / 978
[ Back to top ]