
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
21 - 40 / 978
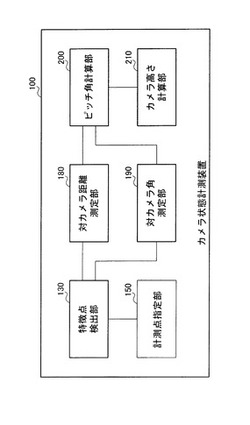
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
ワーク位置検出システム

【課題】透明体であるワークの安定的な位置を検出することができるワーク位置検出システムを提供する。
【解決手段】透明体であるワークの端面が発光するように光を照射する少なくとも一つの投光部(21a〜21c)と、光によってワークの端面に生じた発光箇所を撮像する撮像部(22a、22b)と、撮像部による撮像結果に基づいてワークの位置を検出する検出部と、を有する。
(もっと読む)
画像形成装置、パターン位置決定方法、画像形成システム
【課題】シート材の影響を抑制してテストパターンの位置を検出する画像形成装置を提供すること。
【解決手段】液滴の吐出タイミングを調整する装置100であって、テストパターンからの反射光を読み出す読み取り手段30と、均一パターンの印刷データを記憶する印刷データ記憶手段54と、均一パターンを記録媒体に印刷した後、テストパターンを均一パターン上に印刷するパターン形成手段52と、読み取り手段を等速で移動させる相対移動手段313と、テストパターンが形成された記録媒体に対し読み取り手段が相対移動しながら、テストパターンを光が横断する際に前記受光手段が受光した反射光の第1の検出データを取得する第1の検出データ取得手段617と、予め定められた上限値と下限値の間に含まれる第1の検出データにライン位置決定演算を施してテストパターンの位置を検出する位置検出手段616、を有する。
(もっと読む)
ステレオカメラの取り付け調整方法及びステレオカメラ
【課題】ステレオカメラを自動車等に取り付ける際に、該ステレオカメラの校正距離方向と目的距離方向の調整を容易に行えるようにする。
【解決手段】ステレオカメラ10を自動車40に取り付けて、自動車の直進方向の距離を測定するものとする。ステレオカメラ10は複数の単眼カメラを筐体内に備え、筐体前面を筐体基準面とし、該筐体基準面は反射面を有している。車外に設置されたレーザ光源50の出射光軸と自動車40の直進方向が平行になるように調整した後、レーザ光源50からの出射光をステレオカメラ10の筐体基準面で反射させて、反射光が出射光位置に戻るように、ステレオカメラ10の取り付け姿勢を調整する。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
円形状測定方法および装置
【課題】高価な専用装置を用いることなく、平面上の円形パターンをマルチステップ法により高精度に測定できる円形状測定方法および装置を提供する。
【解決手段】円形パターンを有する被測定物Wを載置するテーブル10、テーブルの回転機構20、画像プローブ30、画像プローブを移動させる移動機構40、制御装置50を有する円形状測定装置を準備する。画像プローブを円形パターンの円周に沿って移動させながら、円形パターンの円周を360°/mピッチで測定する工程と、円形パターンの中心を基準に360°/mだけテーブルを回転させて円形パターンの円周上の同一点を測定する測定動作を、360°/mずつテーブルを回転させながら合計m回行ってm個の測定データを取得する工程と、このm個の測定データから円形パターンの形状成分を求める工程を備える。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層に接触した状態で、原板Mおよび基板のそれぞれに形成されたアライメントマークを、1つの認識手段3により、両アライメントマークが重なる方向から、一方のアライメントマークを撮像した後、他方のアライメントマークを撮像し、得られた両アライメントマークの画像にそれぞれ位置誤差補正処理を行う。そのため、補正後の両アライメントマーク画像を用いて高精度なアライメントを行うことが可能になる。
(もっと読む)
校正原器、形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い校正原器を提供し、一つの校正原器で種々の形状計測装置の横座標の校正を可能にする。
【解決手段】形状計測装置の横座標を校正する際にワークの代わりに配置される校正原器20に、入射角度に係わらず光を元来た方向に反射する再帰性光学素子21を設け、この再帰性光学素子21によって測定光Lmを反射させる。校正原器20は、再帰性光学素子21によって反射するため、種々の曲率半径の測定光を元来た方向に反射することができ、これによって、種々の形状計測装置の横座標の校正に使用することができる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、並びに計測方法
【課題】計測対象面の凹凸に起因する面位置センサの計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される面位置センサを用いて、移動体を高精度に2次元駆動する。
【解決手段】 X干渉計127、Y干渉計16を用いて位置を監視しながらウエハステージWSTを移動させ、センサ72a〜72dを用いてウエハステージ上面に設けられたYスケール39Y1,39Y2のZ位置を計測する。ここで、例えば、2つの面位置センサ72a,72bの計測結果の差より、Yスケール39Y2のY軸方向の傾きが得られる。Yスケール39Y1,39Y2の全面について傾きを計測することにより、それらの2次元凹凸データが作成される。この凹凸データを用いてセンサの計測結果を補正し、該補正済みの計測結果を用いることにより、高精度にウエハステージを2次元駆動することが可能になる。
(もっと読む)
形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い横座標の校正方法によって横座標を校正する形状計測装置、及びその横座標校正方法を提供する。
【解決手段】複数の開口が形成され、これら複数の開口の配列によって校正パターンを形成するアパーチャー板20をワークWの被検面Wsの前面に配置する。この開口を通過すると共に、被検面Wsで反射され、再度開口を通過した測定光Lmを撮像素子5によって検出する。撮像素子上にて結像した校正パターンの横座標位置と、予め計測されている校正パターンの基準横座標位置とを、演算装置7によって比較することによって、形状計測装置1の横座標を校正する。
(もっと読む)
物品径の測定方法
【課題】センサ等を物品内に挿入することなく当該物品の内径や外径を効率的に測定する。
【解決手段】回転テーブル1上に載置された物品2の内周面21と、物品2の外に配設され回転テーブル1の回転軸13からの距離が判明している校正面4aとに、物品2の外に配設した二次元レーザ変位計3のスキャン線を位置させて、内周面21と校正面4aとの変位差を二次元レーザ変位計3にて測定し、上記距離と変位差に基づいて内周面21の半径を算出する。二次元レーザ変位計3のレーザ射出点とスキャン線を含む面上に、回転テーブル1の回転軸13が位置するように変位計3が配置されており、回転テーブル1を回転させて、内周面21とこれと径方向対称位置にある他の内周面における各半径を算出して、これら半径の値を合計することで物品2の直径を算出する。
(もっと読む)
光軸調整システム
【課題】撮影画像における基準マーク画像のズレを考慮することにより光軸調整の誤差を低減する。
【解決手段】カメラ2と、タッチパネル式ディスプレイ3と、画像処理ECU4と、を備え、画像処理ECU4は、タッチパネル式ディスプレイ3の操作によりカメラ2により基準マークが撮影された撮影画像における基準マーク画像の位置が指示位置として指示されると、この指示位置と所定の基準位置との関係に基づいてカメラ2の光軸調整を行う光軸調整部41と、撮影画像の画面特性に基づいて撮影画像における基準マーク画像の位置ズレ量を算出する位置ズレ量算出部42と、位置ズレ量算出部42が算出した位置ズレ量により指示位置を補正する指示位置補正部43と、を備える。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
レーザ干渉測定装置の横座標校正治具および横座標校正方法
【課題】収束光学系を有するレーザ干渉測定装置における測定面上の位置の校正が簡便かつ高精度に行えるレーザ干渉測定装置の横座標校正治具および横座標校正方法を提供すること。
【解決手段】横座標校正治具10は、マーカを有する画像を投影する画像投影手段19と、画像投影手段19を第1回動軸線A1まわりに回動自在に支持しかつ第1回動軸線が所定の回動中心Cを通る第1支持機構11と、第1支持機構を第2回動軸線A2まわりに回動自在に支持しかつ第2回動軸線が回動中心Cで第1回動軸線A1と交叉する第2支持機構12と、を有する。
(もっと読む)
3次元範囲計測システム、3次元範囲計測プログラムおよび記録媒体
【課題】自動車等の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供する。
【解決手段】3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20と、運転者12の視線方向を計測する車内カメラ30と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20は等距離射影式の魚眼レンズカメラを用い、透視投影モデルに変換しない二眼ステレオ法を考案した。車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とした。
(もっと読む)
レーザ光振れ量検出装置、変位測定装置、光学素子成形用金型の製造方法及び光学素子
【課題】レーザ光の光軸に直交する2方向の光軸振れを高精度に測定する。
【解決手段】第1の偏光ビームスプリッタ4は、レーザ光源1から出射されたレーザ光2aを、第1の直線偏光成分2bと第2の直線偏光成分2cとに分割する。光学系3は、第1の直線偏光成分2bの振れ方向と第2の直線偏光成分2cの振れ方向とが互いに直交するように第1の直線偏光成分2b及び第2の直線偏光成分2cのうち少なくとも一方の直線偏光成分を光軸まわりに回転させて合成光とする。遮光部材8は、先端8aを合成光に突出させて合成光の一部を遮光する。第2の偏光ビームスプリッタ9は、遮光部材8で遮光されずに通過した通過光を、第1の直線偏光成分2bと第2の直線偏光成分2cとに分割する。各受光素子10a,10bは、偏光ビームスプリッタ9で分割されたそれぞれの直線偏光成分の光量を測定する。演算部12は、測定結果に基づきレーザ光2aの振れ量を求める。
(もっと読む)
自走式管内検査カメラ装置および管径変換ユニット
【課題】2倍強の管径差をもつ広範な管径(350mm〜800mm)を対象に、検査対象となる配管内を円滑にかつ適正な速度で走行して、管内を斑なく的確に観察できる自走式管内検査カメラ装置を提供する。
【解決手段】走行ユニットを構成する管径変換ユニット1と管径変換ユニット1に選択的に結合される管径変換アダプタ用取付アダプタ13および第1乃至第3の管径変換アダプタ(CA1)〜(CA3)とにより複数種の管径に対応した自走式管内検査カメラ装置の管径変換ユニットを構成している。
(もっと読む)
記録材判別装置、及び画像形成装置
【課題】 記録材からの透過光を検知することにより記録材の厚さを判別する方法では、記録材の白色度の違いにより記録材の厚みを精度良く判別できない可能性があった。
【解決手段】 カラーセンサにより記録材の白色度又は色度を検知し、記録材の白色度又は色度と透過光量に基づいて、記録材の厚さの判別を行うことにより、記録材の白色度又は色度に関わらず、記録材の判別精度を向上させることができる。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
レーザー高さ測定装置および部品実装機
【課題】正確に測定位置を制御でき、かつセンサの取り付け位置調整機構や位置調整作業を必要とせずに測定位置の制御精度を保つことができるレーザー高さ測定装置を提供する。
【解決手段】レーザー光L1を照射するレーザー光照射部61および対象物で反射されたレーザー光を検出する反射光検出部62を有するレーザー高さセンサ6と、レーザー高さセンサ6を平面内で移動させるセンサ移動機構(ヘッド駆動機構41〜43)と、所定の較正位置(光入射軸AO上)に配置された画像カメラ(部品カメラ5)と、レーザー光L1を減衰しつつ透過する減光フィルタ71と、レーザー高さセンサ6を較正位置AOに位置決めしてレーザー光L1を照射し、減光フィルタ71を透過したレーザー光を画像カメラ5で撮像してレーザー光画像を得るレーザー光撮像手段と、座標位置の補正値をレーザー光画像上でのレーザー光の位置に基づいて求める補正値取得手段と、を備える。
(もっと読む)
21 - 40 / 978
[ Back to top ]