
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
101 - 120 / 978
検査方法
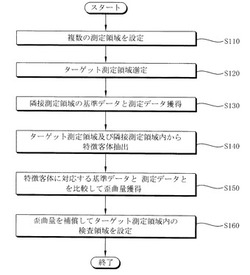
【課題】本発明は検査方法に関わり、より詳細には形状測定装置の測定対象物に対する検査方法を提供する。
【解決手段】基板を検査する検査装備において検査領域を設定するために、基板上に複数の測定領域を設定し、測定領域のうち測定対象物を検査するためのターゲット測定領域と隣接する少なくとも一つ以上の隣接測定領域の基準データ及び測定データを獲得した後、隣接測定領域内で少なくとも一つ以上の特徴客体を抽出する。特徴客体に対応する基準データと測定データとを比較して、歪曲量を獲得し、歪曲量を補償してターゲット測定領域内の検査領域を設定する。これにより、基準データと測定データとの間の変換関係をより正確に獲得することができ、歪曲を補償した正確な検査領域を設定することができる。
(もっと読む)
検査装置、検査方法、検査装置用プログラムおよび露光システム

【課題】パターン形状の測定精度を向上させた検査装置を提供する。
【解決手段】下地層の上に所定のパターンを有するウェハ5のパターンを検査する検査装置であって、対物レンズ7の瞳面もしくは該瞳面と共役な面における領域毎の光の強度情報を検出する撮像素子18と、パターンの形状変化に対しては強度情報の変化が異なり、下地層の変化に対しては強度情報の変化が同程度である、瞳面もしくは該瞳面と共役な面内の第1領域と第2領域の位置情報をそれぞれ記憶する記憶部と、撮像素子18で検出される、第1領域の強度情報と、第2領域の強度情報との差異に基づいてパターンの形状を求める演算処理部20とを備えている。
(もっと読む)
干渉計測方法および干渉計測装置
【課題】 干渉計測の応答速度を損なう事無く高精度な屈折率補正を実現可能な干渉計測方法を提供する。
【解決手段】 参照面で反射された光束と被検面で反射された光束との干渉信号を検出することによって被検光路の幾何学的距離を計測する干渉計測方法において、互いに波長が異なる複数の光束を用いて被検光路の光路長を算出する多波長光路長算出工程、多波長光路長算出工程で算出された被検光路の光路長から被検光路の空気の屈折率を算出する屈折率算出工程、屈折率算出工程で算出された屈折率を平滑化することによって平滑化屈折率を算出する平滑化屈折率算出工程、平滑化屈折率算出工程で算出された平滑化屈折率から被検光路の幾何学的距離を算出する幾何学的距離算出工程を有する事を特徴とする。
(もっと読む)
位置変化判定装置、位置測定装置、位置変化判定方法及びコンピュータプログラム
【課題】センサの設置位置又は向きの変化に関して生じる労力を軽減すること。
【解決手段】設置位置又は設置の向きの変化に応じて測定結果が変化するセンサに対して取り付けられる位置変化判定装置であって、周囲の光を受光することによって、周囲の情報を取得する取得部と、前記センサが所定の位置及び所定の向きに設置された時点で前記取得部が取得した情報を初期情報として記憶する初期情報記憶部と、前記取得部によって取得された現在の情報と、前記初期情報記憶部に記憶される前記初期情報とを比較して、前記センサの現在の位置又は向きが前記所定の位置及び所定の向きから変化したか否か判定する位置変化判定部と、を備える。
(もっと読む)
3次元寸法を計測する装置及びその方法
【課題】計測精度を高精度化し、また計測時間を高速化することができる3次元寸法を計測する装置及び方法を提供する。
【解決手段】基準プレート6上方に配置された位置計測カメラ2で基準プレート6とその上の計測対象物1を撮影し、計測対象物1の基準プレート座標系での2次元座標を演算する。2次元座標上において複数の探査領域SA1〜SA4の位置を特定し、3次元計測カメラ3の撮影位置である複数の視点位置を画像認識にて演算する。視点位置から、基準プレート6と計測対象物1とを含んだ画像を3次元計測カメラ3で撮影する。3次元計測カメラ3で撮影した画像から、3次元計測カメラを基準とした複数の3次元座標を演算する。この座標を、基準プレートを基準とした世界座標系に統合する。世界座標系での3次元座標に基づき、計測対象物1の取付け具12、13相互間の寸法を演算する。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離情報と測定点毎の受光量情報とを取得する光学式距離測定部と、受光量情報において、光量が閾値を超える複数の測定点の並びが所定のパターンを形成している場合に、これらの測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、判定された測定点の距離に基づいて、対象物の位置を測定する位置測定部と、対象判定ステップによって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、同一の対象物のローカル座標系における位置及びグローバル座標系における位置に基づいて較正を行う較正部とを備える。
(もっと読む)
部品位置計測方法
【課題】例えば部品をチャックで傾いて把持した場合でも、部品の先端位置を正確に認識できる部品位置計測方法を提供する。
【解決手段】部品1をチャック2で把持し、その把持位置を計測基準位置Aとして部品を移動させ、部品に交差する方向の光線3,4を部品で遮断させ、遮断位置B,B’における部品のチャックを支点とした傾き方向の位置ずれを計測手段で計測し、その計測値を登録済みの計測基準位置と比較してずれ量Hを求め、ずれ量を一辺とし、計測基準位置Aを一点とする仮想三角形aと、遮断位置B,B’と部品の先端との二点を通る仮想三角形bとの相似関係より、部品の先端位置Cの計測補正値hを求め、ずれ量Hと計測補正値hとの総和で部品先端位置ずれ量ΔZを求める。
(もっと読む)
リソグラフィ装置の位置決めシステムおよび方法
【課題】 位置決めの正確さおよび/または強健性が改善されたリソグラフィ投影装置のアライメント・システムを提供する。
【解決手段】 リソグラフィ装置の位置決めシステムは、位置決め放射線源1、第1検出器チャネルおよび第2検出器チャネルを有する検出システム、および検出システムと連絡する位置決定ユニットを有する。位置決定ユニットは、第1および第2検出器チャネルからの情報を組み合わせて処理し、組み合わせた情報に基づいて、第2オブジェクト上の基準位置に対する第1オブジェクト上の位置決めマークの位置を決定する。
(もっと読む)
車高計測装置
【課題】運転者自らが計測することなしにトレーラの実際の車高を計測することのできる車高計測装置を提供することを目的とする。
【解決手段】自車両の周囲の撮影画像を画像処理する画像処理手段11と、この画像処理手段11による処理画像に基づいて自車両が牽引するトレーラの車高を算出する算出手段13とを備え、算出手段13は、画像処理手段11が画像処理した自車両前方の撮影画像および自車両が牽引するトレーラ後方の撮影画像とに基づいて自車両が牽引するトレーラの車高を算出する。
(もっと読む)
配筋情報取得装置及び配筋情報取得方法
【課題】立体的に配置された鉄筋の配筋情報を取得する。
【解決手段】撮影者は、撮影対象部位2を決定し(S702)、撮影対象部位2の鉄筋のうち、4隅の鉄筋にマーカMKを取り付け、1の鉄筋に方位確認用マーカDMKを取り付ける(S703)。次に、鉄筋内側の中心部付近に全方位カメラ3を挿入し(S706)、その中心部から360度全周囲の鉄筋を全方位カメラ3で撮影し(S707)、撮影した全周囲画像のデータを全方位カメラ3から携帯端末4に取り込む(S708)。携帯端末4は、取り込まれた全周囲画像を方位確認用マーカDMKに基づいて平面画像に展開する(S709)。続いて、展開した平面画像において方位確認用マーカDMK及びマーカMKを検出することにより、その平面画像を4面の画像に分割する(S710)。さらに、分割した各面の画像に対して画像処理を行い、鉄筋の径長やピッチを計算する(S711)。
(もっと読む)
表面検査装置および表面検査方法
【課題】処理負荷、処理時間の増大を抑制し、境界部分の表面欠陥をも取りこぼすことのない検査を可能とすること。
【解決手段】検査対象を有する物体を相対移動させながら撮像した検査対象の撮像画像に基づいて検査対象の表面検査を行う表面検査装置であって、検査対象の撮像画像に設定された検査領域内に更に設定される1〜複数のフィルタ領域のそれぞれに対して所定のフィルタ処理を行い、前回フィルタ処理画像と今回フィルタ処理画像との差分値であるフィルタ処理差分画像に対して、フィルタ領域ごとに画素単位でのしきい値処理を施した二値化画像(表面欠陥候補差分画像)を検査領域全体で統合した二値化画像(表面欠陥候補統合化差分画像)の画素値に前回の処理で得られた表面欠陥画像の画素値を加算することで得た二値化画像(表面欠陥候補統合化画像)を用いて表面欠陥の箇所および個数を特定する。
(もっと読む)
干渉対物レンズ装置及び光干渉測定装置
【課題】低コストでありながら操作性及び機能の優れた干渉対物レンズ装置、及び当該干渉対物レンズ装置を備えた光干渉測定装置を提供する。
【解決手段】光出射部10から出力された光をワークWに対して収束させる対物レンズ31と、対物レンズ31よりもワークW側に配される参照ミラー32と、対物レンズ31を透過してきた光を、参照ミラー32を有する参照光路とワークWを配置した測定光路とに分岐させると共に、参照ミラー32からの反射光とワークWからの反射光とを合成して干渉光として出力させる分岐合成部材33と、参照ミラー32からの反射光又はワークWからの反射光の何れか一方の他方に対する光量を調節する光量調節手段(液晶パネル34及び制御部70)を備える。
(もっと読む)
三次元形状測定装置、三次元形状測定方法及びコンピュータプログラム
【課題】少ない投影パターン数で、形状変化が急激な計測対象や不連続な計測対象の高精度な形状計測を可能とする。
【解決手段】三次元形状計測装置は、明るさ変化を有するパターンを計測空間に投影するパターン投影手段と、パターンが投影された計測空間を撮影する撮像手段とを備え、計測空間に存在する計測対象の三次元形状を計測する三次元形状計測装置であって、撮影手段により得られた撮影画像のパターンの明るさ変化からパターンの局所的な配置情報を算出する局所配置情報算出手段と、撮影画像におけるパターンのボケ量を算出するボケ量算出手段と、局所配置情報とボケ量とに基づき、計測対象の三次元形状を算出する三次元形状算出手段とをさらに備える。
(もっと読む)
欠陥検査装置およびその方法
【課題】同一パターンとなるように形成された2つのパターンの対応する領域の画像を比較して画像の不一致部を欠陥と判定するパターン検査装置において、膜厚の違いなどから生じるパターンの明るさむらの影響を低減して、高感度なパターン検査を実現する。また、多種多様な欠陥を顕在化でき,広範囲な工程への適用が可能なパターン検査装置を実現する。
【解決手段】同一パターンとなるように形成された2つのパターンの対応する領域の画像を比較して画像の不一致部を欠陥と判定するパターン検査装置を、複数の検出系とそれに対応する複数の画像比較処理方式を備えて構成し、又、異なる複数の処理単位で比較画像間の画像信号の階調を変換する手段を備えて構成し、画像間の同一パターンで明るさの違いが生じている場合であっても、正しく欠陥を検出できるようにした。
(もっと読む)
温度測定方法、記憶媒体、プログラム
【課題】測定対象物上に薄膜が形成されている場合でも、測定対象物の温度を従来に比べて正確に測定できる温度測定方法を提供する。
【解決手段】光源からの光を、基板上に薄膜が形成された測定対象物の測定ポイントまで伝送する工程と、基板の表面での反射光による第1の干渉波と、基板と薄膜との界面及び薄膜の裏面での反射光による第2の干渉波を測定する工程と、第1の干渉波から第2の干渉波までの光路長を算出する工程と、第2の干渉波の強度に基づいて、薄膜の膜厚を算出する工程と、算出した薄膜の膜厚に基づいて、基板の光路長と算出した光路長との光路差を算出する工程と、算出した光路差に基づいて算出した第1の干渉波から第2の干渉波までの光路長を補正する工程と、補正された光路長から測定ポイントにおける測定対象物の温度を算出する工程と、を備える。
(もっと読む)
画像情報処理装置及びその制御方法
【課題】誤った対応付けを低減すると同時に、より様々な被写体の形状に対しても三次元計測を可能とする、よりロバストな三次元計測方法を提供する。
【解決手段】複数種類の符号が二次元に並ぶ投影符号列の各符号に、符号の種類ごとに異なる色または輝度を有する点をシンボルとおして割り当てることで得られた二次元の点列を含む投影パターンを被写体に投影し、投影パターンが投影された被写体を撮像することにより得られた撮像画像を用いて被写体の三次元計測を行う画像情報処理装置は、撮像画像から点列を抽出して撮像パターンを取得し、撮像パターンの各点を対応する符号に変換して撮像符号列を取得する。装置は、複数種類のサンプリング形状から選択された一つのサンプリング形状にしたがって所定数の符号を取得し、取得した符号を並べて情報符号列を生成し、情報符号列と投影符号列の部分とを対応付けることで撮像画像中における投影パターンの投影位置を同定し、三次元計測を行う。
(もっと読む)
車載カメラの光軸検査方法及び光軸検査装置
【課題】より小型な空間で実施でき、検査中でも車両周囲で作業を実施できる車載カメラの光軸検査技術を提供することを課題とする。
【解決手段】(b)にて車載カメラ光軸検査は、開状態のフード21と車載カメラ20の間にターゲット120を位置決めし、ターゲット120に設けた赤色発光ダイオード121を用いて実施する。
【効果】カメラ光軸検査中に車両11前方でエンジンルーム235内の検査を実施できるため、車両周囲での作業員の動線が制限されない。加えて、フード21の開状態高さとターゲット120の移動距離を含んだ空間があればよく、車両前方に大型の鏡を設けて検査する場合に比べ、検査空間は小型で済む。よって、より小型な空間で実施でき、検査中でも車両周囲で作業を実施できる車載カメラの光軸検査技術を提供できる。
(もっと読む)
位置測定システムのターゲット面を較正する方法、位置測定システム、およびリソグラフィ装置
【課題】可動オブジェクトの位置を測定するように構成された位置測定システムのターゲット面を較正する方法が用いられる。
【解決手段】位置測定システムは、可動オブジェクト上に設けられたターゲット面と、静止センサシステムと、センサシステムの少なくとも1つの測定信号に基づいて可動オブジェクトの位置を計算する処理デバイスとを含む。処理デバイスは、ターゲット面の凹凸を補正するターゲット面の補正マップを含む。当該方法は、ターゲット面を測定し、測定されたターゲット面ならびにターゲット面および/またはターゲット面に影響を及ぼす物理的オブジェクトの1つ以上の変形モードに基づいてターゲット面全体の再較正された補正マップを決定することによってターゲット面の補正マップを再較正することを含む。
(もっと読む)
変位検出装置
【課題】回折格子が配置された面の垂直方向の変位のみを容易に検出することができる変位検出装置を提供する。
【解決手段】変位検出装置1は、照射光学系2と、干渉光学系3と、受光部4と、変位検出部5とを備えている。照射光学系3は、回折格子100の格子構造が周期的に並んでいるX方向に垂直な面に対して異なる角度でそれぞれ光束を回折格子に入射させる。干渉光学系3は、回折格子100に入射された入射光A1,B1のM次回折光A3,B3どうしを干渉させて干渉光を生じさせる。受光部4は、干渉光を受光して干渉信号を検出する。変位検出部は、干渉信号の変化から回折格子が設けられた面の垂直方向の変位を検出する。
(もっと読む)
101 - 120 / 978
[ Back to top ]