
Fターム[2F065EE03]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944) | 光量変動 (83)
Fターム[2F065EE03]の下位に属するFターム
分布のバラツキ (20)
Fターム[2F065EE03]に分類される特許
1 - 20 / 63
光ファイバセンサ
【課題】光干渉信号出力をセンサ信号とするセンサには、構成が簡単で、センサ部分の無電源化が可能なホモダイン干渉方式があるが、安定な動作を得るには、使用部品に対し厳しい工作精度と熱膨張対策が必要であると共に、センサ信号として変動できる位相範囲は±90度以内に限られていた。
【解決手段】干渉計の入力を周期性光パルスとし、参照光パルスの前半と後半で位相を90度(直交位相)異なる位相とし、計測光パルスと干渉させることにより、90度異なる2つの干渉出力値i1、i2を得て、その参照光と計測光の値r、sとから、参照光と計測光の位相差をθとして、2つの余弦値cosθ1、cosθ2を算出して余弦曲線上に位置を定め、その角度θ1、θ2を求めることによって、干渉光の強度変動、位相動作点変動の影響を除外するとともに、1周期前との角度の差分を積算して、センサ出力とすることにより、センサ信号として変動できる位相範囲が、±90度(半波長)を超えることを許容する光ファイバセンサを提供する。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム

【課題】背景が含まれる場合であっても、背景の明るさの影響を低減して検査対象物表面の明るさを自動的に調整することができる画像処理装置、該画像処理装置で実行する画像処理方法及びコンピュータプログラムを提供する。
【解決手段】検査対象物を含む撮像領域を撮像する撮像部と、撮像領域を前記撮像部で撮像した画像に対して画像処理を実行する画像処理部とを備える。画像処理部は、撮像部から出力された画像の撮像領域内に設けられ、各々が複数の画素を含む複数の小領域ごとに、検査対象物が存在する可能性を示す特徴量を算出する。算出した特徴量に基づいて、少なくとも検査対象物を含む画像の明るさの評価値を算出し、算出した評価値に基づいて、画像の明るさを調整するための調整信号を出力する。
(もっと読む)
検出装置、画像形成装置及びプログラム
【課題】保持部材の第1の方向のたわみを検出する。
【解決手段】第1のイメージセンサは、中間転写ベルトの裏面に形成されたラダーパターンチャートの濃度を測定する。記憶部は、第1のイメージセンサと中間転写ベルトの裏面との間の距離と、この第1のイメージセンサの測定に係るラダーパターンチャートのコントラストとの対応関係を示す第1の関数を記憶する。制御部は、第1のイメージセンサにより測定されたラダーパターンチャートの濃度を用いて、ラダーパターンチャートにおいて隣り合う白領域と黒領域とのコントラストを算出する。制御部は、記憶部に記憶された第1の関数を用いて、算出されたコントラストに対応する距離を特定し、特定した距離を上述した白領域及び黒領域と中間転写ベルトの裏面との間の距離として用いて、中間転写ベルトの幅方向のたわみを検出する。
(もっと読む)
厚み測定方法、厚み測定装置、および厚み測定システム
【課題】立体構造を有する物体の厚み分布を、短時間に、かつ容易に測定する。
【解決手段】厚み測定方法は、測定対象物6に光を照射する光照射工程(S1)と、測定対象物6に照射された光が、測定対象物6を透過しているときに、測定対象物6への光の照射方向とは異なる所定の方向から、測定対象物6を撮像する撮像工程(S2)と、その撮像画像に基づいて、測定対象物6の厚み分布を測定する測定工程(S3)と、を含む。
(もっと読む)
変位センサ
【課題】駆動装置を用いることなく、小型であっても、高精度で計測対象物の変位を測定することができる変位センサを提供する。
【解決手段】光源部を有する投光部と、光源部が出射する光を、計測対象物へ向けて集光して照射する照射部と、計測対象物で照射されて反射された光を集光して受光する第1受光部とを具備する光学系を備える変位センサであって、投光部は、光源部と、第1レンズと、第1ハーフミラーとを具備し、照射部は、第1ハーフミラーと、第2レンズとを具備し、第1受光部は、第1ハーフミラーと、少なくとも4つの穴を有し、この4つの穴はそれぞれxy軸上に配置されているスリット板と、第3レンズと、第1受光素子とを具備し、照射部及び第1受光部は、照射部の光軸と第1受光部の光軸とが一致するように配置され、投光部は、該投光部の光軸が照射部及び前記第1受光部の光軸と垂直に交わるように第1ハーフミラーを介して配置する。
(もっと読む)
パターン検査装置及びパターン検査方法
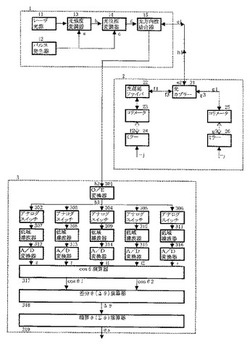
【目的】光量センサ出力と画像取得用のセンサ出力の応答速度のずれによる補正誤差を低減する。
【構成】パターン検査装置100は、光源103と、被検査試料にレーザ光を照明する照明光学系170と、レーザ光の光量を測定する光量センサ144と、パターンの光学画像を撮像するTDIセンサ105と、TDIセンサ105の出力タイミングが早い場合に、出力タイミングとの時間差分の期間、TDIセンサ105の出力データを一時的に記憶する記憶装置140と、光量センサ144の出力タイミングが早い場合に、出力タイミングとの時間差分の期間、光量センサ144の出力データを一時的に記憶する記憶装置142と、光学画像の階調値を時間差分ずらした時刻に出力された光量値を用いて補正する補正回路148と、比較対照となる参照画像を入力し、階調値が補正された光学画像と参照画像とを画素単位で比較する比較回路108と、を備えたことを特徴とする。
(もっと読む)
厚さ測定装置
【課題】C形フレームの機械的なドリフトによる距離検出器間の距離の変位を瞬時に測定し、厚さ測定誤差を補正する厚さ測定装置を提供することを目的とする。
【解決手段】C形フレーム3の腕部に設けられる第1の距離検出器1と第2の距離検出器2との出力から厚さを求める厚さ測定装置であって、C形フレーム3の腕部の下部に設けられ、腕部空間内に、レーザビームの光路にハーフミラーを設けて、当該ハーフミラーの反射した第1のレーザビームの位置の変化を検出する第1のビーム位置変位検出器4aと、当該第1のビーム位置検出器の出力から第1のレーザビームの入射角度の変位と記第1の距離検出器と第2の距離検出器間の距離検出器間の距離の変位と、を求める第1のビーム位置変位処理部4bとを備え、厚さ測定値を自動的に補正するようにした厚さ測定装置。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
3次元形状測定装置
【課題】出射光学系の部品の取り付け角度がずれたとき、出射光学系から出射されるレーザ光の光軸方向のずれを相殺するように出射光学系に入射するレーザ光の光軸の方向を調整することができる3次元形状測定装置を提供する。
【解決手段】レーザ光を出射するレーザ光源10とレーザ光を走査する第1ミラー16との間に、直交する2つの回転軸回りに回転可能に支持されたミラー14aを設ける。測定対象物OBからの反射光を受光して受光位置に応じた信号を出力する第1受光センサ24と、第1受光センサ24にて反射した反射光を受光して受光位置に応じた信号を出力する第2受光センサ26を設ける。3次元カメラCAと測定対象物OBが所定の位置関係になるようにセットし、反射光が第2受光センサ26の所定の範囲内にて受光されるように、ミラー14aを回転させる。
(もっと読む)
三次元形状計測装置
【課題】反射画像の輝度を適切な輝度に調整することができ、被計測物の三次元形状を正確に計測することが可能な三次元形状計測装置を提供すること。
【解決手段】三次元形状計測装置100は、輝度が正弦波状に変化する縞状の光パターンを異なる位相で複数回、被計測物に投影する投影手段10と、光パターンが投影された被計測物の反射画像を撮像する撮像手段20と、被計測物の反射画像を基に、被計測物の三次元座標を計測する計測手段31と、を有し、光パターンを被計測物に投影する前に、投影手段10より所定の光を被計測物に投影し、所定の光が投影された被計測物の反射画像における各画素の輝度階調値と、所定の光の輝度階調値と、を基に、被計測物の光の最大反射率を算出する反射率算出手段32と、最大反射率に応じて、撮像手段20が受光する受光量を調整する調整手段33と、を備える。
(もっと読む)
反射率測定装置、反射率測定方法、膜厚測定装置及び膜厚測定方法
【課題】測定対象物の波長毎の反射率を精度良く測定することができる反射率測定装置及び反射率測定方法、並びに本発明による反射率測定装置を備えた膜厚測定装置及び本発明による反射率測定方法を含む膜厚測定方法を提供する。
【解決手段】
反射率測定装置1は、照射光L1を測定対象物へ供給する測定光源30と、照射光L1の強度及び測定対象物からの反射光L2の強度を波長毎に検出する分光検出部80と、照射光L1の波長毎の強度の検出値を、基準測定対象物からの反射光L2の波長毎の強度の検出値に相当する値に変換する変換係数K(λ)を記録する係数記録部92と、照射光L1の波長毎の強度の検出値及び変換係数K(λ)より求まる、基準測定対象物からの反射光L2の波長毎の強度に相当する値に基づいて、波長毎の反射率を算出する反射率算出部93とを備えることを特徴とする。
(もっと読む)
光学式検出装置、表示装置及び電子機器
【課題】効率的に検出精度を向上させることができる光学式検出装置、表示装置及び電子機器等を提供すること。
【解決手段】光学式検出装置は、照射光を出射する照射部EUと、照射光が対象物に反射することによる反射光を少なくとも受光する受光素子PDと、受光素子PDの受光検出信号を増幅する増幅部100と、増幅部100が出力する信号に基づいて、対象物の位置特定情報を出力する検出部200と、位置特定情報に基づいて対象物の位置を判定する判定部300と、増幅部100の出力ノードN1と検出部200の入力ノードN2との間に設けられる結合キャパシターCAとを含む。
(もっと読む)
光学式位置検出装置
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる光
学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。検出空間10Rからみたときに、光検出器30の周りで周方向で並ぶ第1検出用光
源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは
、光検出器30からの距離が相違している。また、第1検出用光源12Aと第2検出用光
源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非
平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源1
2Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
変位センサ
【課題】安定的なフィードバック制御が可能な変位センサを提供する。
【解決手段】制御部は、複数の画素の第2の方向Yに沿った複数の走査線T毎に受光信号を読み取り、該受光信号に基づいて得られる受光波形のピークに基づく光量レベル(ピーク値又は飽和画素の個数)を走査線T毎に検出し、複数設定された光量レベルの所定の範囲毎の走査線Tの個数をカウントし、その個数が最も多い光量レベルの範囲に基づいてフィードバック制御を行う。
(もっと読む)
ハードディスクメディアの検査装置及び検査方法
【課題】本発明は、分光反射強度に含まれる迷光成分を低減し、パターンドディスク表面のパターン形状を精度よくまたはパターン欠陥を確実に検出できるハードディスクメディアの検査装置または検査方法を提供することである。
【解決手段】本発明は、パターンが形成されたハードディスクメディアの表面に複数の波長を含む光を照射し、波長毎に検出される反射光の強度を前記ハードディスクメディアからの反射光を検出する検出器に発生する迷光成分の強度で補正し、前記補正された反射光の強度から分光反射率を算出することを第1の特徴とする。前記補正は、前記ハードディスクメディアからの反射光の強度を前記反射光の短波長領域をカットした状態とカットしない状態で波長毎に検出し、両者の前記反射光の強度との差に基づいて行なうことを第2の特徴とする
(もっと読む)
光学式位置検出装置、ハンド装置およびタッチパネル
【課題】比較的簡素な構成および信号処理で、対象物体の位置や、対象物体が至近位置に到達したことを確実に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射して第1面41側に第1面41に対する法線方向で強度が変化する離間距離検出用光強度分布L2Zabを形成する。また、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。
(もっと読む)
ハンド装置
【課題】比較的簡素な構成でワークとハンド部との相対位置を検出することにより、ワーク把持動作の高速化を実現することのできるハンド装置を提供すること。
【解決手段】ロボットアーム200のハンド450に位置検出装置10を付加して位置検出機能付きのハンド装置400を構成する。位置検出装置10は、検出領域10Rに向けて位置検出光L2を出射する複数の発光素子12を備えた位置検出用光源部11を有しており、検出領域10Rに位置検出光L2の強度分布を形成する。また、検出領域10Rで反射した位置検出光L3は光検出器30で受光され、その受光結果に基づいて、位置検出部50は、ワークObとハンド450との相対位置を検出する。
(もっと読む)
三次元計測装置及び三次元計測方法
【課題】 被対象物との距離と位置とを高精度測定できる三次元計測装置を得ること。
【解決手段】被対象物5を撮像素子14により撮像する撮像系10と、被対象物5と撮像系10との異なる距離毎に撮像された各画像により検知された輝度が予め定められ閾値以上の輝度であることにより被対象物5を検知する明点抽出部32と、画像の明点を中心とした複数の画素を含む一定領域ごとの輝度を検知し、該一定領域内の輝度分布を求めると共に、該輝度分布に基づいて輝度重心値を求める輝度重心の演算部36と、輝度重心値が検知された画素14aが有する輝度と、周囲の画素14aが検知した輝度とを、輝度重心値が有する輝度に補正した輝度補正値を得る輝度補正部38と、輝度補正値に基づいて被対象物5との距離値を求めると共に、輝度重心値に基づいて被対象物5の位置を検知する三次元検知部43と、を備えたものである。
(もっと読む)
1 - 20 / 63
[ Back to top ]