
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
61 - 80 / 978
基板処理装置に用いられるプロセスモニター装置、プロセスモニター方法、および基板処理装置
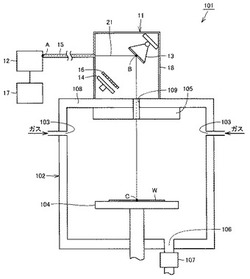
【課題】光学的手法を用いて被処理基板の構造をより高精度に評価することができるプロセスモニター装置を提供する。
【解決手段】プロセスモニター装置11は、光を出射する光源部と、光の強度を検知可能な光検知部と、光源部から出射された光をウェハWまで導き、ウェハWから反射した反射波を光検知部まで導く第一光経路21と、第一光経路21と同等の光伝搬特性を有するように構成され、光源部から出射された光を、ウェハWを経由することなく光検知部まで導く第二光経路と、第二光経路を通して光検知部により検知された光の強度情報に基づいて、第一光経路21を通して光検知部により検知された光の強度情報を補正し、ウェハWの構造を解析するコントローラ17とを備える。
(もっと読む)
計測対象の3次元表面形状算出方法及び3次元表面形状計測装置

【課題】
位相シフト方法による計測対象の3次元形状の計測では、少なくも3種類以上の位相を変えた縞パターンの投影が必要であり、縞パターンの切替、撮像の時間等の計測に時間が掛る課題がある。
【解決手段】
分離可能な異なる2色と各々位相の異なる4種類の縞パターンの2つから合成した異なる2種類の合成縞パターンを計測対象にカラー投影して撮影したカラー画像の色分離を行って撮像画像の縞パターンの位相を算出して計測対象の3次元表面形状の計測を行う。
(もっと読む)
線幅測定装置、画像処理装置、画像処理システム及びプログラム
【課題】線幅見本を画像読取部で読み取ることによる線幅測定の結果の安定性を向上する。
【解決手段】画像読取部での読取画像を受け付ける読取画像受付部25において、白黒2値画像取得部81が、線幅測定用チャートの読取画像である白黒2値画像を取得し、領域決定部82が、白黒2値画像上で線幅測定に用いる線幅測定領域を決定し、角度検出部83が、線の読取角度を検出し、角度比較部85が、この読取角度と線を読み込む角度として指定された指定角度との差分が閾値以下かどうか判定し、閾値以下でなければ、警告出力部86が、線幅測定用チャートの再読み込みを画像読取部に指示し、閾値以下であれば、画素カウント部87が、線を構成する画素のうち線幅測定領域内の画素数をカウントし、線幅決定部88が、カウントされた画素数、線幅測定領域の線描画方向の長さに相当する画素数等に基づいて、線幅を決定する。
(もっと読む)
光学試験表面の形状を判定する方法及び装置
【課題】光学試験表面の誤差と適合光学系の誤差とを分離することを可能にする方法及び装置を提供する。
【解決手段】光学試験表面14の形状を判定する方法は、測定ビーム30の波面を適合光学系20により光学試験表面14の所望の形状に適合させ、光学試験表面14の形状を適合済測定ビームにより干渉測定するステップと、適合済測定ビームを光学試験表面に種々の入射角で照射し、測定ビームの波面を光学試験表面14との相互作用後にそれぞれ測定するステップと、個々の入射角ごとに測定された波面からの干渉測定結果に対する適合光学系20の影響を確定するステップと、光学試験表面の形状を、適合光学系20の確定された影響を干渉測定結果から除去することにより判定するステップとを含む。
(もっと読む)
落射照明画像用のエッジ位置測定値補正
【課題】 落射照明画像用のエッジ位置測定値補正を提供する。
【解決手段】 精密マシンビジョン検査システムにおける落射照明画像エッジ位置誤差を補正するための方法が開示される。方法には、落射照明光および透過照明光を用いてワークエッジ特徴のエッジ位置測定値を比較することが含まれる。透過照明光を用いたエッジ位置測定値は、落射照明より不確実性が低い。位置補正係数が、2つのエッジ位置測定値間の差から決定され得る。位置補正係数は、落射照明光を用いて取得された画像に基づく後続のエッジ位置測定値を補正するために記憶してもよい。いくつかの実施形態において、位置補正係数は、複数のエッジ用のエッジ位置測定値の比較に基づいて決定してもよい。
(もっと読む)
平坦度検出装置、および平坦度検出方法
【課題】簡単な構成で容易に平坦度を検出可能な平坦度検出装置、および平坦度検出方法を提供する。
【解決手段】平坦度検出装置1は、三次元測定装置2から計測データを取得する計測データ取得手段141と、検査対象計測面上の第一計測点を取得する第一計測点取得手段143と、第一計測点から検査対象計測面の幾何形状式を算出する第一形状算出手段144と、計測データから隣接計測面に属する第二計測点を取得する第二計測点取得手段145と、第二計測点から隣接計測面の幾何形状式を算出する第二形状算出手段146と、検査対象計測面および隣接計測面の交線または交点を算出する外周縁算出手段147と、交線または交点に基づいて補正検査対象計測面の幾何形状式を算出する補正計測面算出手段148と、補正検査対象計測面の幾何形状式に基づいて検査対象面の平坦度を検出する平坦度検出手段149と、を具備した。
(もっと読む)
位置検出装置、入力機能付き表示システムおよび位置検出方法
【課題】検出光が対象物体以外の物体で反射して受光部に入射することに起因する検出誤差の発生を防止することのできる位置検出装置、該位置検出装置を備えた入力機能付き表示システム、および位置検出方法を提供すること。
【解決手段】位置検出装置10において、位置検出の際、受光部13は、対象物体Obで反射した検出光L2を受光するとともに、検出光L2が対象物体以外の物体Sbで反射した検出光(迷光L5)も受光する。ここで、迷光L5の強度は、検出光L2の強度に比例する。そこで、検出対象空間10Rを介さずに受光部13に入射する補償光L4を出射する補償用光源部14を設け、検出光L2の強度を増大させたときには、補償光L4の強度を低減し、検出光L2の強度を低減させたときには、補償光L4の強度を増大させる。
(もっと読む)
画像色彩補正装置及び画像色彩補正方法
【課題】光源によらない一定の色に補正できる画像色彩補正装置を提供する。
【解決手段】本発明における画像色彩補正装置1は、測定対象物2と複数のカラーコード付き標識CTを同時に又は別時に異なる複数方向から撮影する撮影部3と、撮影部3により撮影されたカラーコード付き標識CTの撮影画像から、位置検出用パターンP1の位置を求める位置検出部51と、撮影画像から基準色パターンP2を抽出する基準色パターン抽出部52と、撮影画像からカラーコードパターンP3を抽出するカラーコードパターン抽出部53と、基準色パターン抽出部で抽出された基準色パターンのうち、少なくとも光源色補正に用いる色彩を用いて、撮影画像の光源色補正を行う色補正部71とを備える。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
半導体装置の製造方法および半導体装置
【課題】下層および上層に形成したデバイスパターン間のズレ量を現状で実施されている方法よりも高精度に計測可能な半導体装置の製造方法および半導体装置を提供すること。
【解決手段】実施形態によれば、半導体装置の製造方法が提供される。半導体装置の製造方法は、パターン形成工程と、開口部形成工程とを含む。パターン形成工程では、第1層に位置ズレ計測用のパターン111と第1パターン101とを形成する。開口部形成工程では、前記第1層よりも上層に積層した第2層103に前記位置ズレ計測用のパターン111を露出させる開口部と第2パターン102とを形成する。
(もっと読む)
観察対象物の表面の3次元ビューを表示するための方法および装置
【課題】観察対象物の表面の3次元ビューを表示し、表面の凹凸、寸法を取得する方法及び装置を提供する。
【解決手段】複数の表面点の第1の座標系における3次元座標を決定し、観察対象物の表面の複数の測定点を選択し、複数の測定点のうちの1つまたは複数に隣接した複数の表面点のうちの3つ以上の第1の座標系における3次元座標に基づいて基準表面250を決定し、基準表面および複数の測定点に基づいて第1の座標系とは異なる第2の座標系を設け、複数の表面点の第1の座標系における3次元座標を第2の座標系における3次元座標に変換し、複数の測定点に基づいて、観察対象物202の表面210の対象領域262内である複数の表面点のサブセットを決定し、第2の座標系の3次元座標に複数の表面点のサブセットの描画された3次元ビューを表示する。
(もっと読む)
テーピング装置
【課題】。
【解決手段】照明装置100を構成する一対の照明装置100A、100Bの複数のLED101が収納溝4B内のチップ部品Aに光を拡散板102を介して均一に照射して、しかもチップ部品Aに付された丸の部分AAや文字・数字部分ABを形成する刻印の深さに応じて、確実に照射光によって前記刻印の端部により影ができるような傾斜した照射光となるように照射して、印字検査カメラ85が撮像した画像において、丸の部分AAや文字・数字部分ABとそれ以外の表面部分ACとのコトラストが大きくなって、丸の部分AAや文字・数字部分ABが黒色に、それ以外の表面部分ACは白色に撮像でき、チップ部品Aの有無、前記チップ部品の表裏、チップ部品Aの向きを検査することができる。
(もっと読む)
計測方法、ステージ装置、及び露光装置
【課題】周囲の気体の屈折率変動の影響を低減させて、ステージの位置決め精度等を向上できる露光装置である。
【解決手段】投影光学系(PL)を介してウエハステージ(WST)上のウエハ(W)に露光用の照明光を照射して、ウエハ(W)に所定のパターンを形成する露光装置であって、ウエハステージ(WST)に設けられたスケールと、このスケールの位置情報を検出する複数のXヘッド(66)と、複数のXヘッド(66)を一体的に支持し、線膨張率がウエハステージ(WST)の本体部よりも小さい計測フレーム(21)と、複数のXヘッド(64)の検出結果からウエハステージ(WST)の変位情報を求める制御装置とを備える。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】等速自在継手用ブーツ等の成形部品の欠陥を安定して効率的にしかも安価に検出することができる欠陥検出方法及び欠陥検出装置を提供する。
【解決手段】軸方向両端部に開口部を有し、かつこの開口部に外径側に突出する突起部2を設けた弾性材料からなる筒状の成形部品30における欠陥を検査する。軸心廻りに回転している成形部品に対してその突起部2の突起量を検出する。その後、その検出した測定データから成形部品30の回転振れ及び変形に基づく変位を修正した修正データを算出する。次に、設定された欠陥判断基準となる閾値と修正データとの比較と、設定された区間内での修正データの傾きの正常値との比較とを行う。これらの比較に基づいて成形部品の欠陥を検査する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】ディスパリティ画像を生成するためのステレオ画像を撮像するカメラの光軸のずれを補正する。
【解決手段】カメラ21−1,21−2は、異なる視点から、同一の被写体を撮像する。画像ずれ補正部22は、撮像された複数の画像を、ずれ調整部24の調整パラメータ保存部82に保存されている調整パラメータに基づいて変形し、それぞれ補正画像を生成する。マッチング部23は、ステレオマッチング処理によりディスパリティ画像を生成すると共に、複数の補正画像間の視差方向の対応付けが不能な程度を示すエラー量の全画面の積分値をマッチング評価値として算出する。ずれ調整部24は、調整パラメータのうち、視差方向の対応付けに必要とされるパラメータを変化させて、マッチング評価値が最小となるように調整パラメータを更新して、調整パラメータ保存部82に保存する。本発明は、ディスパリティ画像生成装置に適用することができる。
(もっと読む)
校正用治具および光切断式形状計測装置の校正方法
【課題】光切断式形状計測装置および校正用治具を静止させた状態で、撮像手段の内部パラメーターおよび撮像手段とスリット光との相対位置を校正する。
【解決手段】光切断式形状計測装置の校正に用いる校正用治具1において、互いに平行かつ高低差が既知である参照面1a、1b、1c、1dを複数有する校正用治具1本体と、参照面1a、1b、1c、1dに設けられた参照面内における位置が既知である複数の参照孔2と、複数の参照孔2から光を射出する光源とを備える。
(もっと読む)
干渉計及び測定方法
【課題】参照面と被検面との間の距離の測定に有利な技術を提供する。
【解決手段】光源からの光を2つの光に分割して、一方の光を参照面に入射させ、他方の光を被検面に入射させ、前記参照面で反射された光と前記被検面で反射された光との干渉光を検出する検出部と、距離を求める処理を行う処理部、前記光源からの光の波長を固定しての干渉光である第1の信号と、前記光源からの光の波長を連続的に変更させながらの干渉光である第2の信号、前記第2の信号を周波数解析して前記第2の信号に含まれる周期誤差を算出し、前記第1の信号に含まれる周期誤差と前記第2の信号に含まれる周期誤差との対応関係を表すテーブルを用いて、前記算出された前記第2の信号に含まれる周期誤差に対応する前記第1の信号に含まれる周期誤差を特定し、前記第1の信号から前記特定された周期誤差を減算し、前記参照面と前記被検面との間の光路長に対応する位相を求める。
(もっと読む)
検査装置および検査方法
【課題】過度の欠陥検出を抑制することにより、不必要な欠陥修正を低減することのできる検査装置および検査方法を提供する。
【解決手段】センサ106からマスク101の光学画像を取得するし、光学画像におけるパターンの寸法と、判定の基準となる基準画像におけるパターンの寸法とを測定し、これらから第1の誤差を求める。マスク101上の光学画像と基準画像について各転写像を推定し、これらの転写像におけるパターンの寸法を測定して第2の誤差を求める。各転写像を比較し、差異が閾値を超えた場合に欠陥と判定する。欠陥と判定された箇所における第2の誤差を第1の誤差で補正する。
(もっと読む)
形状計測装置及び形状計測方法
【課題】グイ位相に伴って生じる計測誤差を低減する。
【解決手段】計測装置100は、光源から射出された光を参照光と被検光とに分割する分割部110と、前記参照光を反射する参照面111と、前記被検光を被検面113に集光する集光部112と、前記被検面でキャッツアイ反射された被検光と前記参照面で反射された参照光との干渉光を検出する第1検出器114とを含む計測ヘッド101と、前記計測ヘッドを前記被検面に沿って駆動する駆動部140と、前記計測ヘッドの位置を検出する第2検出器150と、前記被検光の前記被検面における回折によって生じるグイ位相を取得し、前記第1検出器により検出された干渉光の情報から前記被検光と前記参照光との間の位相差を算出し、前記第2検出器により検出された前記計測ヘッドの位置と前記取得されたグイ位相と前記算出された位相差とから前記被検面の形状を算出する処理部115と、を備える。
(もっと読む)
自己発光型ターゲット及び変位計測システム
【課題】 屋外において昼夜に亘って連続的に変位計測が可能で計測誤差が少ない変位計測用の自己発光型ターゲット、及びそれを備えた変位計測システムを提供すること。
【解決手段】 撮像手段(カメラ3)で撮像した画像を解析手段(PC4)で解析することにより計測対象物(レール)の変位計測を行う変位計測システム1に用いられ、計測対象物(レール)に取り付けられて自ら発光する変位計測用の自己発光型ターゲット(計測用ターゲット2)を、ケース20と、このケース20の背面側内部に取り付けられて発光する発光手段21と、ケース20の前面側内部に取り付けられ、蓄光性蛍光体と光透過性物質とを含有して板状に成型された蓄光面材22と、を備えた内照式の自己発光型ターゲットとする。
(もっと読む)
61 - 80 / 978
[ Back to top ]