
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
141 - 160 / 978
車両寸法計測装置
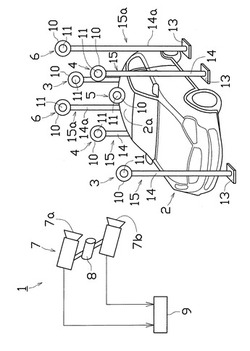
【課題】反射材を備えるターゲットが複数設置された車両をステレオカメラにより撮影した画像のみに基づいて、車両の寸法を精度良く計測できる車両寸法計測装置を提供する。
【解決手段】 車両2の車長に合わせて設置され、既知の高さに設定される車長用ターゲット3と、車両2の車幅に合わせて設置され、車長用ターゲット3と同一の高さに設定される車幅用ターゲット4と、車両2の最も高い位置に設置される車高用ターゲット5と、車両2の車軸方向に沿うように設置され、車長用ターゲット3及び車幅用ターゲット4と異なる既知の高さに設定される車軸用ターゲット6と、夫々のターゲット3〜6が設定された車両2を撮影するステレオカメラ7と、該ステレオカメラ7から得た画像に基づいて、車両2の寸法を計測する演算装置とを備える車両寸法計測装置1。
(もっと読む)
円錐面測定装置

【課題】被検円錐面と球面測定用干渉計とのアライメント調整を高精度に行い、被検円錐面の径測定の精度を向上させることが可能な円錐面測定装置を得る。
【解決手段】平面測定用干渉計20、2軸傾き調整ステージ32、XYステージ34およびZステージ35により、被検円錐面91と球面測定用干渉計10とのアライメント調整を行うとともに、基準レンズ12のキャッツアイポイントが被検円錐面91上に位置する基準位置に、被検レンズ90を配置する。球面測定用干渉計10からの測定光の一部が被検円錐面91上の円弧状の領域に対し垂直に入射する被検円錐面測定位置に、被検レンズ90を移動させ、基準位置と被検円錐面測定位置との間の距離をレーザ測長機41の検出値により求め、その距離に基づき被検円錐面91の径の測定値を算出する。
(もっと読む)
位置姿勢計測装置、その処理方法及びプログラム
【課題】2次元画像上における画像特徴と3次元形状モデルを構成する幾何特徴とを対応付け、その結果に基づいて物体の位置及び姿勢の計測を行なう。
【解決手段】位置姿勢計測装置は、3次元形状モデルを保持するモデル保持手段と、物体の位置及び姿勢を示す概略値を取得する手段と、撮像装置により撮像された物体の2次元画像を取得する手段と、概略値に基づいて3次元形状モデルにおける幾何特徴を2次元画像上に投影し、当該2次元画像上に投影された3次元形状モデルの幾何特徴の方向を算出する手段と、2次元画像から画像特徴の方向を算出する手段と、算出された画像特徴の方向と、3次元形状モデルから算出された幾何特徴の方向とを比較することにより、画像特徴と幾何特徴とを対応付ける手段と、当該対応付けられた画像特徴と幾何特徴とにおける距離に基づいて概略値を補正することにより物体の位置及び姿勢を算出する位置姿勢算出手段とを具備する。
(もっと読む)
画像機器の校正用パターン
【課題】被測定物の測定パターンに関わらず、測定誤差を低減させることができる画像機器の校正用パターンの提供。
【解決手段】校正用パターン1は、校正用パターン1の中央に設けられる矩形状の明領域からなる中央部11と、中央部11の外側に設けられる枠状パターン12とを備える。枠状パターン12は、中央部11を中心として横方向に沿って両側に延出し、等間隔とは異なる所定の間隔で明領域、及び暗領域を交互に繰り返す横方向パターンと、中央部11を中心として縦方向に沿って両側に延出し、等間隔とは異なる所定の間隔で明領域、及び暗領域を交互に繰り返す縦方向パターンとを有している。そして、横方向パターン、及び縦方向パターンは、中央部11における所定の位置から両側に等距離だけ離間した位置にエッジを有し、各エッジにおける濃淡値の変化方向は同一である。
(もっと読む)
無人走行車両の誘導装置及び無人走行車両の誘導方法
【課題】GPSが使用できない場所でも無人走行車両を精度良く目標地点へ到達させることができる誘導装置及び誘導方法を得ることを目的とする。
【解決手段】誘導装置は、ステップ102において、無人走行車両が有するカメラで撮影された撮影画像から指定された複数の教示点Pn、及び無人走行車両が移動する移動領域を平面で示した移動地図から指定された複数の教示点Qnに基づいて無人走行車両の現在位置を導出する。そして、誘導装置は、ステップ116において、無人走行車両が導出された現在位置を起点として目標地点まで自律走行している途中で、計測手段による計測誤差の累積値が所定値に達した場合に、無人走行車両が有するカメラで新たに撮影された撮影画像から指定された複数の教示点Pn、及び移動地図から指定された複数の教示点Qnに基づいて無人走行車両の現在位置を再び導出する。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
ガラス基板検査装置及びガラス基板製造方法
【課題】簡易な構成で素材、板厚、端面の状態等を含めたガラス基板等の状態の検査を行うことが可能なガラス基板検査装置及びガラス基板の製造方法を提供することを目的としている。
【解決手段】画像データを解析する解析手段を有し、前記解析手段は、前記画像データの所定領域内における色に基づき前記ガラス基板の素材を判別する判別手段と、前記ガラス基板の板厚を算出する板厚算出手段と、前記ガラス基板の端面に対する加工が行われているか否かを検出する端面状態検出手段と、を有する。
(もっと読む)
トールボット干渉計およびその調整方法
【課題】トールボット干渉計のセンサ部の傾きを精度良く調整する。
【解決手段】トールボット干渉計は、光源1から発せられて被検光学系Lを通った光を、回折格子3および撮像素子4を含むセンサ部Mに導き、被検光学系の波面を計測する。該干渉計は、光軸OAに沿った方向における被検光学系とセンサ部との位置関係を、波面の計測時とは異なる位置関係であって被検光学系の像点位置に撮像素子が配置されるように設定する機構7,8と、回折格子からの回折光の撮像素子上での光量分布を該撮像素子を用いて測定する測定部5と、光量分布の測定結果を用いてセンサ部の傾き補正量を算出する補正量算出部5と、傾き補正量に応じた光軸に対するセンサ部の傾き調整を行う機構9とを有する。
(もっと読む)
構造物変位量測定方法
【課題】画像式測定方法であっても、動的測定や1mm以下の微小変位を離れた位置からの完全非接触測定を可能とし、測定精度の推定を可能にする構造物変位量測定方法を提供する。
【解決手段】動的撮影を行い、基準画像と測定画像とを比較、画素変位量を算出し、撮影距離と撮影角度の情報をもとに、画素数で表わされた変位量を実スケールの単位に変換し、変位量を算出する。あわせ実測定誤差も算出する。現地の条件により、測定誤差が大きい場合には、撮影条件を変更する。大気揺らぎの影響を軽減するために、撮影距離の制約を導入、夜間撮影による測定を可能にする。また、測定データに大気揺らぎの影響がある場合、フィルタ処理などによる軽減を可能とする。
(もっと読む)
工作機械における工作物測定方法およびその装置
【課題】計測器を別途使用しなくても、工作物測定用の測定ヘッドが本来有している測定機能を有効利用して測定ヘッドの3次元オフセットを取得して、測定ヘッドで工作物を測定する工作物測定方法を提供する。
【解決手段】工作機械に取付けられた測定ヘッド10を所定角度旋回させて基準球30を第1の方向E1と第2の方向E2から測定することによって、基準球における中心点A1の座標を取得する。測定ヘッドが基準球の中心点を第1の方向から測定したときの測定ヘッドの第1の機械座標と、測定ヘッドが基準球の中心点を第2の方向から測定したときの測定ヘッドの第2の機械座標とに基づいて、測定ヘッドの3次元オフセットを取得する。その後、測定ヘッドの3次元オフセットを使用して、工作物を測定ヘッドで測定する。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】異なる視点からの撮影画像である左画像と右画像を適用した被写体距離の算出を確実に行うための変換パラメータを算出する装置および方法を実現する。
【解決手段】異なる視点から撮影された左画像と右画像の射影変換を実行する射影変換処理を実行して、射影変換のなされた射影変換左画像と射影変換右画像を適用したステレオマッチングによるエラー評価値を取得する。射影変換左画像と射影変換右画像の画像回転角度情報とエラー評価値の対応情報に基づいてエラー評価値が最小となる画像回転角度を求め、その画像回転角度に対応する射影変換パラメータを算出する。この処理により、ステレオマッチングにおいてエラーの発生可能性が低減された最適な射影変換パラメータを算出することができる。
(もっと読む)
3次元形状測定装置及び3次元形状測定方法
【課題】 ステージを回転軸周りに回転させながら3次元形状測定を行う場合に、3次元カメラの位置を異ならせても効率の悪化を防ぐ。
【解決手段】 コントローラ30は、第1のカメラ位置に配置した3次元カメラ20の測定により取得したステージ10の定点の座標又はベクトルの成分を記憶しておく。コントローラ30は、第1のカメラ位置と異なる第2のカメラ位置に配置した3次元カメラ20の測定により取得したステージ10の定点の座標又はベクトルの成分と、前記記憶しておいたステージ10の定点の座標又はベクトルの成分とを用いて、第2のカメラ位置で3次元カメラ20により測定した3次元形状を表す3次元データを、第1のカメラ位置で3次元カメラ20により測定した3次元形状を表す3次元データに座標変換するためのカメラ座標変換係数を取得する。
(もっと読む)
光学装置
【課題】折り返し平面鏡の変形によって生じる被検光学系の透過波面を繋ぎ合わせるときの誤差を低減させた光学装置を提供する。
【解決手段】被検光学系T1の被測定領域よりも小口径の折り返し平面鏡F1を挟んで、被検光学系T1の透過波面を測定する第1の干渉計I1と対向するように第2の干渉計I2を設ける。そして、第2の干渉計I2は、測定光を照射し、折り返し平面鏡F1の表面に形成された鏡面S1で反射され、再び第2の干渉計I2に戻ってきた戻り光を基に、第2の干渉縞画像を取得する。解析装置11は、第2の干渉計I2により取得された第2の干渉縞画像を解析して、折り返し平面鏡F1の鏡面S1の変形量を測定し、折り返し平面鏡F1の変形によって生じた誤差を打ち消すように透過波面の補正を行う。
(もっと読む)
2次元測長機による測定値の補正方法
【課題】汎用の2次元測長機を用いても露光面に形成された座標上の露光点を高精度に測定できるようにする。
【解決手段】X軸ガイドとY軸ガイドがX軸とY軸で直角に直交している状態から、X軸とY’軸とで示すように90度以下の角度θで交差する状態になる。このとき、X軸ガイドとY軸ガイドに基づいて露光点観測カメラが露光点20を測定すると、測定される座標の測定値はx’とy’となるが、露光点20における真の座標の測定値はx、yである。一方、真の座標の測定値x、yと実際の測定値x’、y’との関係は、x=x’+y’cosθ、及び、y=y’sinθで表わすことができる。従って、X軸ガイドとY軸ガイドが90度以下の角度θで交差していても、実際に測定された測定値x’、y’と交差角度θを上式に代入すれば、真の座標の測定値x、yを容易に求めることができる。
(もっと読む)
位置計測装置及び方法、露光装置並びにデバイス製造方法
【課題】アライメントマークの位置を計測する時間の短さの点で有利な位置計測装置の提供。
【解決手段】位置計測装置の制御部は、撮像系のテレセントリシティに関する情報を予め記憶し、基板に形成された複数のアライメントマークのうち少なくとも1つに関して、ステージの位置制御により撮像系に対するフォーカス調整を行って撮像系に撮像を行わせ、撮像によるアライメントマークの信号に基づいてX−Y平面に平行な面における位置を求め、フォーカス調整のなされた少なくとも1つのアライメントマークに関して、基板表面の第1の位置を検出系に検出させ、他のアライメントマークに関して、フォーカス調整を行わずに、撮像系に撮像を行わせ、かつ基板表面の第2の位置を検出系に検出させ、撮像によるアライメントマークの信号と第1の位置と第2の位置とテレセントリシティに関する情報とに基づいて、X−Y平面に平行な面における位置を求める。
(もっと読む)
TCPハンドリング装置
【課題】インデックスタイムを効果的に短縮することのできるTCPハンドリング装置を提供する。
【解決手段】TCPハンドリング装置1において、キャリアテープにおける露光単位マーク54を取得する第2カメラ6bと、TCPの外部端子およびコンタクト部の接続端子が正しく接続するように、位置ずれ補正を行うプッシャステージ4とを設ける。取得した露光単位マーク54の画像情報に基づいて、試験部に新たな露光単位が位置したと判断したときに、プッシャステージ4は位置ずれ補正を行い、位置ずれ補正を行った後、次の露光単位が試験部に位置すると判断するまでは、コンタクト不良となる以外、プッシャステージ4は位置ずれ補正を行わない。
(もっと読む)
形状測定装置
【課題】振動の影響による3次元形状の測定誤差を低減した形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物をライン光で照明して撮像するプローブと、プローブと被測定物とを相対移動させるリニアモータと、照明の状態と撮像の状態から被測定物の形状を測定する形状演算部34と、プローブの振れを検出する振れ検出部28と、パッシブ補正およびアクティブ補正を行う補正部と、振れ検出部28に検出された振れに基づいて、パッシブ補正およびアクティブ補正のうちいずれの補正を行うかを決定する処理部32とを備えて構成される。
(もっと読む)
形状測定装置
【課題】振動の影響による3次元形状の測定誤差を低減した形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物を照明して撮像するプローブと、プローブと被測定物とを相対移動させるリニアモータ17と、照明の状態と撮像の状態から被測定物の形状を測定する形状演算部34と、プローブの振れを検出する振れ検出部28と、振れ検出部28に検出された振れに基づいて測定の制御を行う制御部30とを備えて構成される。
(もっと読む)
塗工パターン寸法測定装置
【課題】パスライン変動の影響を最小限とし、塗工パターンに柔軟に対応できると共に、小型化できる塗工パターン寸法測定装置を実現する。
【解決手段】搬送方向に沿って走行するシート基材上に塗工材を塗布または印刷した塗工パターンの寸法を、塗工部と前記シート基材の反射率の差を光学的に撮像する光学読み取り手段により測定する塗工パターン寸法測定装置において、
前記光学読み取り手段は、
前記搬送方向に直交して前記シート基材に密接配置される、複数のレンズが線状に配置されたレンズアレイと、
前記レンズアレイの結像位置に線状に配置された一次元イメージセンサと、
を備える。
(もっと読む)
処理装置、処理システム、座標補正方法および座標補正プログラム
【課題】スループットの低下を低減しつつ、レシピに登録された座標と実際の座標とのずれを自動的に補正する。
【解決手段】基板Wにおけるモデルの検査・測定座標を記憶したレシピに基づいて搬送ステージ13上に載置された基板Wにおけるモデルを検査・測定する基板検査・測定装置10は、搬送ステージ13上に載置された基板Wにおけるモデルの実座標を特定し、特定した実座標をレシピに登録する(ステップS114、S415)。
(もっと読む)
141 - 160 / 978
[ Back to top ]